 综采自动控制系统
综采自动控制系统

《综采自动控制系统》由会员分享,可在线阅读,更多相关《综采自动控制系统(8页珍藏版)》请在装配图网上搜索。
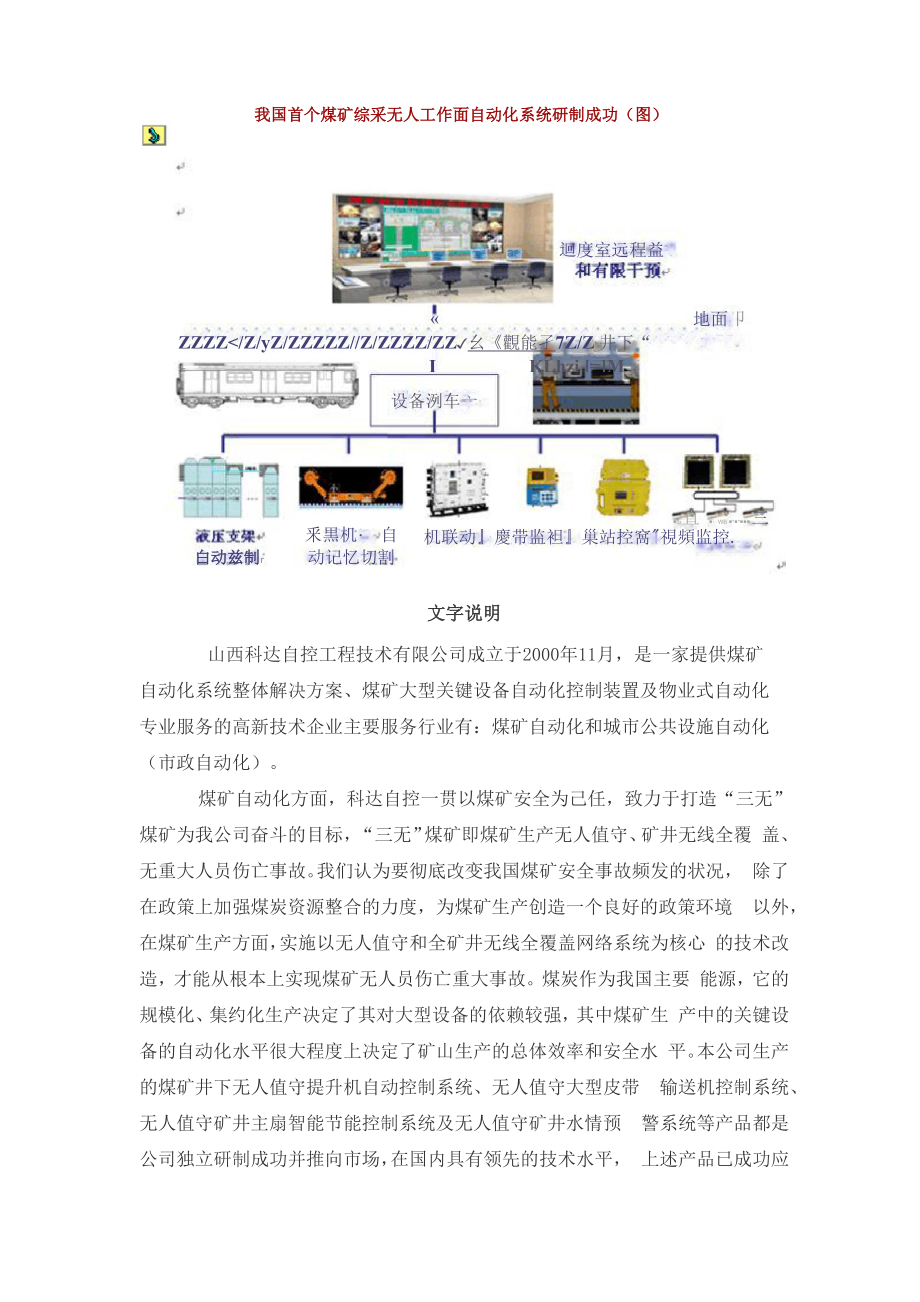
1、我国首个煤矿综采无人工作面自动化系统研制成功(图)ar白动兹制r迴度室远程益视设备洌车亠釆黒机 自动记忆切割地面卩ZZZZ/Z/yZ/ZZZZZ/Z/ZZZZ/ZZ幺觀能孑7Z/Z 井下“上 JIKLhzi =Mfb 直 WB * 三机联动慶带监袒巢站控窩視頻监控.文字说明山西科达自控工程技术有限公司成立于2000年11月,是一家提供煤矿 自动化系统整体解决方案、煤矿大型关键设备自动化控制装置及物业式自动化 专业服务的高新技术企业主要服务行业有:煤矿自动化和城市公共设施自动化 (市政自动化)。煤矿自动化方面,科达自控一贯以煤矿安全为己任,致力于打造“三无” 煤矿为我公司奋斗的目标,“三无”煤矿
2、即煤矿生产无人值守、矿井无线全覆 盖、无重大人员伤亡事故。我们认为要彻底改变我国煤矿安全事故频发的状况, 除了在政策上加强煤炭资源整合的力度,为煤矿生产创造一个良好的政策环境 以外,在煤矿生产方面,实施以无人值守和全矿井无线全覆盖网络系统为核心 的技术改造,才能从根本上实现煤矿无人员伤亡重大事故。煤炭作为我国主要 能源,它的规模化、集约化生产决定了其对大型设备的依赖较强,其中煤矿生 产中的关键设备的自动化水平很大程度上决定了矿山生产的总体效率和安全水 平。本公司生产的煤矿井下无人值守提升机自动控制系统、无人值守大型皮带 输送机控制系统、无人值守矿井主扇智能节能控制系统及无人值守矿井水情预 警系
3、统等产品都是公司独立研制成功并推向市场,在国内具有领先的技术水平, 上述产品已成功应用于“西山煤电”、“晋城煤业”、“潞安环能”、“大同 煤业”、“中煤平朔煤业”等大型煤炭企业,并取得良好效果。随着节能减排 和数字矿山概念的不断推进,这些产品必将成为市场上的主流产品。本公司除 提供上述采掘、运输、提升、排水等煤矿关键设备的单机控制系统之外,还提 供全矿井综合自动化平台。我国大中型煤矿在煤矿生产的大部分关键环节实现了自动化的改造,但是 在设备最多,难度最大的采煤环节还是一个空白,采煤环节必须在现场进行人 工操作。由我公司研发并负责技术总承包的国内首个煤矿综采无人工作面已在 晋煤集团古书院矿运行。
4、该系统负责对 200 多台设备的进行集中控制,代表了 采煤控制的世界先进水平。无人工作面的主要特点如下:1、在顺槽控制中心,实现工作面的控制u2、采煤机自动记忆切割u3、液压支架自动定位,推移u4、三机自动联动u5、皮带系统及泵站的自动控制u6、视频监视自动跟踪u相关资料: 煤矿综采工作面由机械化向自动化的飞跃综采无人工作面整体构想与实现山西科达自控董事长 付国军煤矿是国民经济必不可少的基础性行业,然而它在民众的心目中却是一个管理 混乱、技术落后、事故频发的代名词。与国外发达国家的煤矿相比,百万吨死亡率 要高出很多。一些重大的恶性事故在国际上极大的破坏了国家形象,也影响了我党 的执政能力。提高
5、煤矿的安全水平,减少人员伤亡一直是国家政府,尤其是煤炭大 省领导不断努力的大事。我认为一方面要求行业相关领导提高认识水平,加大制度 的建设和执行力度;更重要的是加大技术的研究力度实现无人化开采。煤矿生产的 无人值守是煤矿生产发展的必由之路,是解决目前煤矿事故频发这一难题的最终办 法。采掘工作面的自动化又是整个生产环节的重中之重。因综采是我国煤矿最主要 的采煤工艺,综采工作面的无人化和少人化就成了解决煤矿安全的核心课题,那么 如何解决这一难题呢?要解决这一难题,关键是自动控制技术的全面应用,由自动 化控制技术从采煤工艺的角度来主导综采工作面的设备运行及配合。从自动控制的 角度来看待综采工作面就应
6、从综采系统的整体角度来思考问题:综采工作面是煤矿生产最前沿的工作环节,也是最复杂的工作环节。其设备数 量多,设备之间互相制约、相互协调,任何单一设备都无法脱离其它设备而单独完 成任务。同时这些设备的任何一个动作还受地质条件的限制。一个标准的综采工作 面一般要由 200-300台设备构成,核心设备有采煤机、刮板运输机、液压支架、转 载机、破碎机和皮带运输机,其中仅液压支架就有100-250 架之多。不熟练的工作 人员,人工操作都非常困难,实现自动化的难度可想而知。然而,现在的自动化技 术已发展到今天,如果有专业队伍能够与采煤工艺深入的结合,在地质条件允许的 情况下实现自动化工作是完全有可能的。可
7、喜的是煤矿资源整合为煤矿技术的提高 指明了方向,煤矿企业要求技术进步的积极性大大的提高,我们高兴的看到晋城煤 业集团古书院矿“自动化综采工作面”已开始下井试运行。阳泉荫营煤矿的“薄煤 层自动化综采工作面”的地面试车已经结束,即将进入下井试运行阶段。在这两个 “自动化综采工作面”的设计和实施过程中,我们发现要想实现综采工作面的自动 化运行,必须对综采工作面的设备有一个重新的认识和定位。必须打破原有的在人 工操作基础上以单机为控制目标的传统思路,打破设备生产厂家的界限、打破设备 功能的界限、破除单机智能化的传统研究思路,从工作面整体采煤的思路来看待每 一台设备。其实它们都仅仅是一个大机器的一部件而
8、已,所有的工作和动作多是为 完成一个任务采煤,都应在一控制中心的统一协调控制下工作。一、 要完成机械化采煤向自动化采煤这一惊险的一跃,首先要对工作面设 备进行重新分类 从工作面整体自动化的角度,要把综采工作面的设备分为三大类:工作面控制中心、 生产设备和辅助设备:其中生产设备包括“主要采煤设备、转载运输设备”;辅助 设备包括“动力中心、泵站”等;控制中心是自动化工作面的中枢神经,包括工作 面整体操作平台、主采机组机控制站、转载运输控制站、视频监测中心、通讯调度 中心等。1. 生产设备包括主要采煤设备、转载运输设备主要采煤设备是整个综采工作面的核心设备,我们不妨把它称作“主采机组” 这里把工作面
9、的三机“采煤机、运输机、和工作面支架”看成是一个大型设备。由 于这三种设备结构上相互连接、动作上互相制衡、位置上相互重叠。故从自动控制 的角度来看是不可分割的一个整体,应把它当成一台大型成套设备来看待,控制也 应由一个控制中心统一指挥。尽管现在从生产和使用角度三者是由不同厂家生产和 提供,而且各自有自己独立的动力系统和控制系统,但三者在采煤过程中是不可分 割的。在目前以人工操作为主要工作方式的情况下(机械化采煤),每台设备的动 作可单独操作,并且是各自生产厂家都对其进行自动化技术的改造,如智能采煤、 电液控制系统和刮板机在线监测系统等。这些技术都是站在单体设备本身的角度, 而没有从工作面整体运
10、行的模式上来思考。工作面要想连续高效的在无人值守的情 况下自动化工作,以上任何一个设备都不能独立完成。其中一项的自动化水平的提 高不会对工作面整体工作有任何影响,只有把它们看作综采机组的一个部件,通过 一个总控中心对每一个环节进行精确定位、协调控制,才能使整个工作面像一台机 器一样连贯自如、配合默契的工作,才能达到无人值守的目的。其实“无人工作面” 或“自动化工作面”应该说是一个有人操作的可以自动行走、自动割煤、自动支护、 自动装煤、自动运煤的一台大型机器,而操作人员不在机器上,而是在顺槽的操作 列车上。所谓“无人”只是整个机器的每个部件无人单独操作而已。 转载运输设备包括转载机、破碎机、皮带
11、机和超前支护设备,是综采工作面的接续 设备,主要完成煤炭的连续运输工作。因其与主采设备无直接连接,并可单独运动, 所以可做为接续设备在控制中心与主采机组进行连锁控制,实现顺煤流起车、逆煤 流留停车和紧急停车等功能。超前支护设备虽然也是靠液压进行行走控制,但控制 过程和方式与工作面支架不尽相同,而且可以独立于工作面支架而单独行动。它的 主要防护对象也是转载机和破碎机等,所以也把它做为转载运输设备的一部分来处 理,转载运输设备与主采机组通过工作面控制中心进行连锁控制。2. 辅助设备一般是指设备到车上的所有动力保障设备辅助设备包括动力中心、泵站、清水站等。动力中心是为整个工作面所有设 备提供电力,控
12、制中心可通过网络对其任何一个动作进行控制,并可读取每一路线 的所有电气参数及开关状态。泵站是液压支架的动力源,可通过控制中心进行集中 控制,完成自动配液、软化处理、压力检测、水位控制、泵组开停及各种保护。3. 工作面控制中心是综采工作面由机械化向自动化过度的关键设备,包括工 作面整体操作平台、主采机组机控制站、转载运输控制站、视频监测系统、通讯调 度系统等。下文重点阐述。二、工作面控制中心可由五大系统组成1 主采机组机控制站:主要是负责直接采煤设备的的控制,把采煤机、刮 板机、工作面支架这三大组成部分当成一个整体设备进行控制。它可完成采煤工作 的各采煤工艺的控制。取代智能采煤机中的智能化部分,
13、如:记忆切割、煤岩分界 识别等特殊功能。使采煤回归到原来的基本功能,主要完成牵引行走、割煤、喷雾 和参数采集等功能。而计算量较大的智能控制功能,上交到主采机组控制站,由控 制站结合运输机、支架的工作状况及具体位置,同时要结合当时的地质条件和瓦斯 的变化情况进行协调控制。同时也取代了电液控制系统的部分高端控制要求:如。 在主采机组控制站,可选择“远程”单体和“远程”自动操作,在“远程”单体模 式下,用户可通过自动化集控计算机画面的手动控制按钮,实现支架控制系统的单 架单功能控制、单步操作、手动成组操作,如支架立柱升、降;移架、推溜、侧护 板伸;底调、平衡、支架小循环自动控制;成组支架降、移、升工
14、作循环自动控制 (成组自动控制,包括:成组自动推溜、成组自动降移升、成组自动支架前端 辅助采煤机喷雾、成组自动移架喷雾);在远程自动模式下,液压支架会跟随采煤 机的运行而进行相应的移架、自动推溜操作、自动降-移-升、自动支架前端辅 助采煤机喷雾。根据电液控制系统采集的工作面的各种参数,可在主采机组控制站 的计算机上设置相关自动追机拉架、设定控制支架的推移步距、斜切进刀、调斜等 工艺过程的参数调整和命令发布;在主采机控制中心的计算机上具有对支架控制系 统的故障诊断、显示和报警功能。使电液控制系统回归到原始的执行机构的作用上, 同时可保留一些常规操作。支架电液控制系统有“就地”和“远程”控制,在“
15、就 地”模式下,可实现单台支架降、移、升工作,就地手动具有最高的优先权,就地 手动时可以屏蔽掉远程控制命令。运输机的在线监测本来也是一个无实际应用作用 的中间功能,也归入到主机控制中心。同时可对运输机进行自动调链和张紧的控制, 还可引入变频驱动技术,实现自动力矩平衡控制。这样可使系统更加简单,同时监 测到的数据还可直接用于主采机组的保护和控制。除上述主控功能外,主采机控制 站还应具备视频采集控制和控制切换功能。使工作面的视频信号随采煤机的运动分 屏地投射到控制中心,以便于操作人员观察现场情况。2. 转载运输控制站:主要负责转载机、破碎机、皮带机和超前支护支架的连 锁和协调控制。并在工作面控制中
16、心的协调下跟随主采机组的推进自动移动。同时 采集所有设备的工作参数和超前支护的顶板参数。3 视频监测系统:主要完成工作面设备及顺槽设备的主要监控工作。根据需 要分屏地反映到工作面操作平台上,供操作人员分析使用。要完成综采设备由人工 跟机控制到控制中心集中控制的转变,必须解决工作面的可视化问题。这里要解决 的重点问题有视频的传输问题和摄像头的防尘问题。由于采煤机移动工作的特点, 采用移动无线视频比较好。要使整个工作面达到无线网络全覆盖,然后在液压支架 和采煤机上安装摄像头,并可根据采煤机的位置控制摄像头交替工作,自动跟踪采 煤机行走,以保证最佳的视频效果。防尘也是必须解决的关键问题之一。4 通讯
17、调度系统:在工作面无线覆盖的基础上,为工作面所有空间提供无线 全覆盖的无线通讯系统。使工作人员在工作面及两个的顺槽的任何一个位置都能进 行移动通讯,保证整个工作队伍的通讯联络。5 工作面整体操作平台:是整个综采工作面的所有设备进行集中控制的平台。 它可控制整个综采工作面所有设备,同时负责与地面调度进行信息联络,地面调度 中心可能过光纤网络监视工作面的所有设备工作状态和各种参数。同时可进行视频 监视和电话指挥,必要时可在地面对设备进行人工干预,以便处理紧急事故。三、综采无人工作面的系统框图及模型见系统示意图四、该构架下的自动化综采工作面的特点按上述构架所建立的自动化综采工作面有以下特点:1 打破
18、了综采工作面以机械设备为主的工作模式。目前所谓“自动化工作面” 的研究均是在传统的“人工操作模式”下以某种机械设备为主进行扩展,其中一种 方法是以电液控制系统为基础,采集采煤机的信息,以此扩展到工作面其他设备的 控制;一种方法是以采煤机的智能化为基础再与电液控制控制系统相连进行自动控 制。综采工作面是一个多设备、多系统相互融合和的复杂系统,设备与设备之间的 动作相互交织,还要考虑地质条件变化等因素的影响。单一设备的控制系统从运算 能力上其实是达不到的,只能是设备之间互相通信和联络,再通过各自的控制系统 决策控制,这不仅影响了指令的执行时间,也容易出现逻辑错误。更何况机械设备 厂家其技术特点都是
19、以机械为主,自控的技术力量一般都不高,设备之间还存在相 互竞争的因素,想达到协调一致的控制是不可能的。所以要想使整个工作面达到“自 动化采煤”的目的,必须打破以机械设备为中心的“机械化采煤”的工作方式。2 打破了以设备生产厂家为单元的独立控制思路。要实现自动化采煤,必须 达到多设备协调统一的控制,打破生产厂家的壁垒。这样既可以提高工作面的整体 性,又可以降低对单体设备控制的技术要求。因为,对于单体设备来说,智能化水 平再高,也无法解决工作面所有设备的协调工作,对工作面的自动化运行不会有任 何影响。3 确立了以自动化技术为主导的“主采机组”的整体控制方案。由于综采工 作面的复杂性,必须把工作面相
20、互连接的所有设备看成一个大型的可行走的采煤机 组。其中的采煤机、支架、刮板机不论设备的体积有多大、数量有多多、功能有多 强都是主采机组的一个部件,任何一个动作都要在协调其他部件、同时考虑工作面 环境变化的情况下执行。4 通过无线网络全覆盖,使工作面的视频监视功能得到加强,同时也解决了 语音通话的问题。更重要的是在特殊情况下可以在工作面可视的距离内任何一点进 行遥控操作。无线网络还可以作为数据和控制信号的备用通道,使我们的控制系统 的传输达到双通道互为备用,大大提高系统可靠性。五、此框架下的自动化工作面能达到什么效果 在以上控制方案实施后,可实现四级监控,三级控制:1 可在地面调度室监控工作面所
21、有设备的工作过程、工作状态和相关数据。 通过视频观擦采煤机行走、割煤、摇臂调高卧底的动作过程;观察液压支架的升- 降-移的工作过程、转载运输设备、超前支护设备的工作和移动过程。并可进行 语音通话,实施语言指挥;在特殊紧急情况下,还可以直接干预停机。2 可在顺槽设备列车上(工作面控制中心)进行“远程自动控制” 和“远程 手动控制”。“远程自动控制” 就是在工作面条件允许的情况下实现全自动采煤, 采煤机可实现记忆切割,根据示范刀切割数据进行自动巡航、调高、卧底、加速和 减速;实现斜切进刀、磨三角等功能。支架可以实现跟机拉架、调斜、成组拉架等 动作。“远程手动控制”就是在工作面地质条件不好的情况下,在控制中心的计算 机上通过视频观察对单体设备进行点动控制。3 在远程操作出现问题是,工作人员还可以拿手持遥控器在可视范围内进行 人工操作。4 除了上述自动化的工作之外,采煤机和支架还保留各自的本机操作功能, 在特殊情况需要人员现场处理时,工人可在机器旁进行单机、单功能操作。
- 温馨提示:
1: 本站所有资源如无特殊说明,都需要本地电脑安装OFFICE2007和PDF阅读器。图纸软件为CAD,CAXA,PROE,UG,SolidWorks等.压缩文件请下载最新的WinRAR软件解压。
2: 本站的文档不包含任何第三方提供的附件图纸等,如果需要附件,请联系上传者。文件的所有权益归上传用户所有。
3.本站RAR压缩包中若带图纸,网页内容里面会有图纸预览,若没有图纸预览就没有图纸。
4. 未经权益所有人同意不得将文件中的内容挪作商业或盈利用途。
5. 装配图网仅提供信息存储空间,仅对用户上传内容的表现方式做保护处理,对用户上传分享的文档内容本身不做任何修改或编辑,并不能对任何下载内容负责。
6. 下载文件中如有侵权或不适当内容,请与我们联系,我们立即纠正。
7. 本站不保证下载资源的准确性、安全性和完整性, 同时也不承担用户因使用这些下载资源对自己和他人造成任何形式的伤害或损失。
