 空三导入说明
空三导入说明

《空三导入说明》由会员分享,可在线阅读,更多相关《空三导入说明(37页珍藏版)》请在装配图网上搜索。
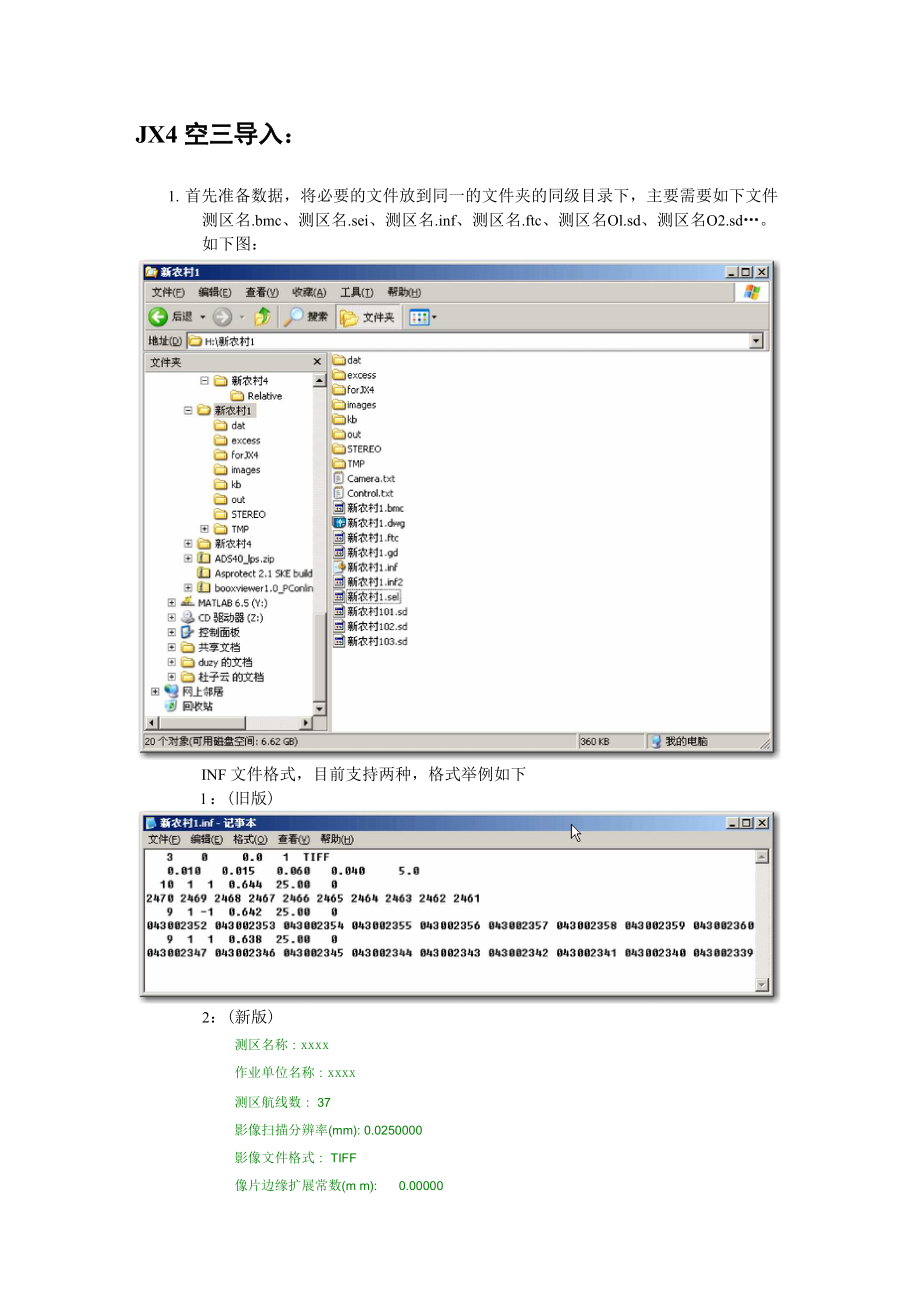
1、JX4 空三导入:1. 首先准备数据,将必要的文件放到同一的文件夹的同级目录下,主要需要如下文件 测区名.bmc、测区名.sei、测区名.inf、测区名.ftc、测区名Ol.sd、测区名O2.sd。 如下图:INF 文件格式,目前支持两种,格式举例如下 l :(旧版)2:(新版)测区名称:xxxx作业单位名称:xxxx测区航线数: 37影像扫描分辨率(mm): 0.0250000影像文件格式: TIFF像片边缘扩展常数(m m):0.00000摄站GPS坐标标志:4自动点点位分布间隔(m m): 5.00000 测区航线排列顺序: 2上下视差限差(mm):0.01500模型连接平面限差(m m
2、):0.10000模型连接高程限差系数:0.04000最大允许高程值(m):8800.0最小允许高程值(m):0.0第 1 航线像片数: 31第 1 航线摄影机序号: 1第 1 航线飞行方向标志: 1第 1 航线地形标志: 0第 1 航线概略重叠度:0.62958第 1 航线摄影比例尺(千): 32.00000032501396 032501397 032501398 032501399 .(像片号)Bmc 文件记录了加密点信息2230 0_190F3479586.229633403.54949.002_190D3480175.404634510.37250.159_189A3479715.3
3、57634941.84049.081Sd 文件记录了像点152.058105.9961200 9190190F7.8075-86.2302190D-3.841061.2568189A68.136987.6064Ftc 文件记录了相机参数0.0000 152.05800.0206-105.998 106.000106.000 105.999106.006 -106.001-106.004 -106.001-0.002 0.0090.000000e+000 0.000000e+000 0.000000e+000 0.000000e+000SEL 文件同样也有规范要求,相邻数字之间必须以空格隔开,正
4、确格式举例如下通常可能会出现如下错误格式(遇到片名与第一个转角间没有空格隔开,导致引入出错,遇此情况,请手工修改此文件,将该区域隔开):2.运行MapMatrix软件,在工程区域选择右键菜单“加载JX4工程”如下图:然后选择相应的INF文件,即可完成JX4工程的加载,如下图:选择一亍文件已存在|新近的查找范围(X): 叵 新农村1三| jE严氐未&5TERE0 Otmp 弓新农村1. inf文件名(S):文件类型):|in(*. m)打开datexcforimakbout aaalaiaa三 取消|加载完成后,在工程浏览区域,即出现如下内容:3. 开始关联影像,具体操作如下:在影像节点选择右键
5、菜单 关联影像在弹出的对话框中选中所有的影像,然后点击按钮”,出现如下界面选择 查找影像 按钮,弹出如下对话框,选择影像路径选定路径后确认,得到如下信息:选择 自动关联 按钮,即得到如下结果(若不能自动关联,可分别在“待关联影像ID”栏及“待关联影像名”栏中选定,然后点击按钮*,即可关联影像):4. 关联完成后,选择 影像 节点, 在右方的属性栏中输入正确的影像扫描分辨率5. 重做内定向,选择影像节点,右键菜单选择内定向,即完成自动内定向,相关操作 见手册。6. 完成内定向后,即可创建立体模型。VirtuoZo 空三导入:1. 首先准备数据,在 VirtuoZo 系统中使用恢复测区功能将相关文
6、件的路径设定正确,如 果使用恢复测区功能未能完全将路径设定正确,需要手工检查文件路径设定是否正确, 主要包含如下文件:测区名.dat、测区名.img、测区名.idx、测区名.blk。2. 设定完成后,在 VirtuoZo 中打开该测区,选择“创建立体模型”菜单,完成立体模型 的创建:3. 在 VirtuoZo 中创建立体模型成功后,即可使用 MapMatrix 的导入功能了。注意:请使 用VirtuoZo3.5或早期的版本创建立体模型,自3.5以后的版本后,VirtuoZo创建立体 模型时,生成的影像下的aop文件有误,不可使用,仅模型下的aop文件是正确的,由 于 MapMatrix 使用影
7、像下的 aop 文件,因此,若使用较新的版本可能导致 MapMatrix 得到错误的外方位元素。4. 启动MapMatrix软件,在工程区域选择右键菜单“加载VirtuoZo”,选择相应的“测区 名.blk”文件或者“测区名.dat”文件即可完成VirtuoZo工程的自动加载5. 加载后工程如下:1S1 X|!工程浏览窗口x起始页1| 碰 MapMatrix 2006 -起贻页文件(巳视图(刃工具(D 窗口帮助(H) :仞2国囤圖画冕同rara.任务列表固输出窗口输岀窗口I: 对象属性影像工具左影像工具-右Ti XTzrvcvA XT,2、丿 卅I043002328. vz_043002327
8、. vzi.vz_2369.vzi.vz_2370.vzi.vz_2371.vz.vz_2372.vz:.vz_2374.vz.vz_2375.vz:.vz_2444.vz.vz_2445.vz2447.vz_2446.vz2448.vz_2447.vz.vz_2453.vz尹:新农科& 日國影像宙三 Strip.Of由三 Strip.l 亩三 Strip_2;B 立体像专囱碑 043002323. vz_043002322. vz 由碑 043002324. vz_043002323. vz 由碑 043002325. vz_043002324. vz 由碑 043002326. vz_04
9、3002325. vz 由碑 043002327. vz_043002326. vz 田诗S -= 043002329.vz_043002328.vzS -= 043002330.vz_043002329.vzS -= 043002331 .vz_043002330.vz S 守 2368.S 謬 2369.S 謬 2370.因謬2371.田胡2372.Eh謬 2373.因,謬2374.S 謬 2375.E- 2376.S 謬 2445.S 謬 2446, 田盲由“碑 2449.vz_2448.vz 囱謬 2450.vz_2449.vz 囱碑 2451.vz_2450.vz囱碑 2452.vz
10、_2451.vz 囱碑 2453.vz_2452.vz 由碑2454.;日圍产品 白 g DEM 043002323. vz_043002322. vz 困 043002324. vz_043002323. vz 田 A43nn232F.V7 043002324.V7-L工程文件己经存在:C: Wi si onTekMapMatrixproject新农村4. xml? 选择另外一个文件? 保存立体模型数据 保存航带: 保存航带:1?保存航带:2?保存立体模型.支持的VirtuoZo文件类型有两种,一种是测区文件*.blk, 种是测区参数文件*.dat。*.blk,*.dat*.iop*.aop
11、*.mdl,*.ste*pcf*.plf*.rop*.lei,*.rei,*.lep,*.rep*.otp*.dtp*.img测区文件(两者必须存在任意一个) 内定向文件(与影像文件放在一起,必须存在) 绝对定向文件(与影像文件放在一起,必须存在) 模型文件(没有则不加载) 模型像点文件(没有则不加载) 模型核线信息(没有则不加载) 模型定向信息(没有则不加载) 模型核线,核线参数(没有则不加载) 正射影像参数文件(没有则不加载)DEM 参数文件(没有则不加载) 影像列表文件(没有则不加载)首先在测区目录寻找VirtuoZo模型,加载它们,包括它们的DEM,DOM。然后寻找影像列表文件*.im
12、g,加载影像;如果没有 img 文件,那么视图通过模型记录的信息加载影像。加载完成后,可参考手册后续操作处理。PATB结果导入:需要将如下文件放在同一目录下,另保持文件名前缀一致:*.ori*.adj*.im影像ID,外方位元素(必须)加密点文件(没有则不加载)像点文件(没有则不加载)Ori 外方位元素,记录了线元素和旋转矩阵,支持两种格式:0.999441194694 -0.030214370205 -0.014296509454 0.030354196459 0.9994924606570.009666635723 0.013997182103 -0.010095193013 0.9998
13、510718962583 0.00000000 80684.54163 50396.78085 587.42288-0.998840789499 0.043602185578 -0.020394279710 -0.043905729225 -0.9989278106830.00667Adj 控制点文件,10.01411 0.00434 0.128支持两种格式:0.0730.0941200283098.49296650132.7262929.70387041200387943.01908150071.34825551.550171422300384623.09129949580.35317773
14、.67514641012570962.62285721347.293730 45.8739000.0010.0010.0041022570959.47845721348.510530 45.9848300.0020.0020.0041032571308.46875721328.008060 43.5308900.0010.0010.0041042571313.38615721324.396230 43.7257200.0010.0020.0050.014680462702 -0.019732312922 0.0155588706790.999684228829Im 像点文件,支持两种格式 15
15、83152131.000 0583053-11931.474-31861.1170583055-599.307-28289.3030583056-5004.196-30478.386058307114754.261-6751.6800-992583152131.000583053-11931.474-31861.117583055-599.307-28289.303583056-5004.196-30478.38658307114754.261-6751.680-99可选择加载PATB,在弹出的对话框中选择相关文件* ori,即可加载,由于ori文件仅包含外方位元素信息,加载完成后,需要关联影
16、像文件,重新设定航带信息:工程浏览窗口加载 MapMatrix加载MapMatrix空三成果加载 VirtuoZo加载JX4工程加载 Z/I Imaging加载 Leica Helava加载PATB K加载Albany驱加载Bingo加载 Dat/EM Summit加载 PhorexII加载Inpho重划分航带,影像重排,设定扫描分辨率等新建航带鼠标托拽影像到另一航带完成后结果重排顺序排列后结果影像节点选择右键菜单 关联影像在弹出的对话框中选中所有的影像,然后点击按钮”,出现如下界面选择 查找影像 按钮,弹出如下对话框,选择影像路径选定路径后确认,得到如下信息:选择 自动关联 按钮,即得到如下
17、结果(若不能自动关联,可分别在“待关联影像 ID”栏及“待关联影像名”栏中选定,然后点击按钮,即可关联影像):关联完成后,选择 影像 节点, 在右方的属性栏中输入正确的影像扫描分辨率ZI 空三导入:Z I输出的数据可能没有后缀,加载程序在给定的目录下搜索匹配的文件(注意要将以下文 件放在同一目录中):Project工程文件,记录了一些参数(必须)PhotoControlCamera影像参数文件,记录影像定向信息,像点信息(必须) 控制点文件(必须)相机文件(必须)目前支持的文件格式如下Project 文件begin project_parameters SU86-96file_type:asc
18、iiflying_height:1200average_elev_grnd:30earth_radius:6378000atmospheric_flag:offunder_water_ref:offref_index_water:1.34chart_datum_above_control:0curvature_flag:offlinear_units:metersangular_units:degreesstd_dev_meas:6Control 控制点文件begin control_pointssx=0.1 sy=0.1 sz=0.1 pc=XYZ pt=CONTROL290012073 7
19、36797.673744 3599383.901846 4.626754/sx=0.0557584074378026 /sy=0.07179136438319027 /sz=0.08624384035976135 /pc=XYZ /pt=CONTROL /desc= - Densified290012088 736762.3120480001 3599348.119071 5.556857/sx=0.05734980383575867 /sy=0.07410802925459561 /sz=0.08773254812211942 /pc=XYZ /pt=CONTROL /desc= - Den
20、sified290010980 736429.185665 3599335.935716 6.97467/sx=0.08140024569987489 /sy=0.1057780695607554 /sz=0.1513142425550219 /pc=XYZ /pt=CONTROL /desc= - Densifiedend control_pointsCamera 相机参数begin camera_parameters vexcelfocal_length:105.2ppac:-0.270ppbs:00film_format:67.5103.5lens_distortion_flag:off
21、io_required:yescamera_type:framemedia_type:digitalpixel_size:99image_size_in_pixels:750011500scanline_orientation:4photo_coord_sys_orientation:1photo_coord_sys_origin:37505750focal_length_calibration_flag:offcalibrated_focal_length_stddev:0.03ppac_calibration_flag:offcalibrated_ppac_stddevs:0.0030.0
22、03self_calibration_enabled_params:0antenna_offsets:000end camera_parametersPhoto 文件,文件中可能记录两类信息,影像信息和像点像点:begin photo_measurements 1_2317strip_id 1 version 2.010340335 -12.978815-45.927078-12.978815-45.9270781 8510340509 -11.495853-28.550691-11.495853-28.5506911 8510340565 -11.691913-38.664854-11.69
23、1913-38.6648541 8510339582 -32.882727-42.027377-32.882727-42.0273771 8510339835 -31.519819-15.733252-31.519819-15.7332521 85end photo_measurements影像信息begin photo_parameters 2_2374 strip_id 2camera_name: vexcelcamera_orientation: 1image_id: D:OSGB SB.1167ImagesUC37-060612_2374.jpgGPS_TimeStamp: 13666
24、6.510592view_geometry: nadirEO_parameters:488728.3674706245 168235.5158672578 2577.9301388838160.8690556436206394 0.3776591385137687 -178.8092870323141GIVEN_parameters: 488728.3674706245 168235.5158672578 2577.9301388838160.8690556436206394 0.3776591385137687 -178.8092870323141GIVEN_std_devs: 0.0013
25、52853677050890.0030179470440530270.002181337290228786 0.003916128824537383 0.0017992470688865030.001123096347484448footprint: 489502.754376 169544.187081 489554.844559 167038.265513 487920.391978 167004.133420 487868.301796 169510.054988DRIVE_type: collinearityimage_size: 7500 11500sensor_id:-1end p
26、hoto_parameters加载前先将所有必须的SSK加密成果文件拷贝到一个目录中,见下图后退3 S转到文件夹心已已心&仓心已已巴1田田田田田田田田田日 田las2Frogi_:=uti FilesPython21Skyline_nolimi Terr Guilder vc6VirtuDZo win32:=LppWINDOWS一)ImagesETLO-rh-r-JJlUL h、model photo proj ect6于对象冋用磁盘空间:4.64 GB)690 KB将需要处理的影像放到一个文件夹中,见下图:-Ini X|文件迥 編辑 查看(V)收藏 工具(T)帮助地址|(| E:ZIImag
27、e文件夹心已已心&仓心已已色1田田田田田田田田田日 田Ias2Frogi_:=uti FilesPython21Skyline_nolimiTerr Guilder vc6VirtuDZo win32:=LppWINDOWSZI12于对象冋用磁盘空间:4.64 GB)20. 2 MB我的电脑然后运行MapMatrix软件,在工程浏览窗口中选择右键菜单“加载Z/IImaging”,见下图:再弹出的对话框中选择SSK加密成果的目录,找到project文件,见下图:选中此文件打开,弹出如下对话框:设定原始影像的路径,指定扫描分辨率,如果是DMC相机则指定扫描分辨率为0.012,并 在“数码量测相机内
28、定向”的选项前打勾,见下图:设定完成后,选择“OK”按钮,即可完成SSK加密成果的导入,导入后弹出如下对话框:可在此根据需要再删减相关不需要的数据,删减完成后,选择“确定”即弹出如下对话框:选择“是”,则程序会自动根据导入的结果反算像方误差,如果误差值很小(一般最多几个像素误差),则确定导入结果正确。选择“否”,则不作此检查;下图为导入后的结果:Leica Helava 空三导入:这里加载的是Helava输出的报告文件*.rep*.rep报告文件(必须)*.cam 相机文件(必须)*.ipf像点文件(必须)*.rep文件中记录了工程的大部分信息,包括控制点,影像外方位元素等。Rep文件的格式
29、有很多种。支持的几种如下:1. 使用 PARAMETER ADJUSTMENTS REPORT 标记的PARAMETER ADJUSTMENTS REPORTImage ID,ParameterOriginalOriginalDeltaAdjustedAdjustedGround PtNameValueSigmaValueValueSigma39_807Camera X M,Ft558269.912447.53001.326e-04558269.91no sigmaCamera Y M,Ft4481860.452447.53008.768e-044481860.45 no sigmaCamer
30、a Z M,Ft3155.102447.53001.562e-043155.10no sigmaOmega Deg1.651.9382-2.650e-051.6no sigmaPhi Deg-0.2 51.93824.179e-06-0.2no sigmaKappa Deg60.3 51.9382 -2.846e-0660.3no sigmaP3901x (XYZ Cntrl)556567.8500.1000.032 556567.882no sigmay4480886.6500.1000.066 4480886.716 no sigmaz1483.3600.100-0.020 1483.34
31、0 no sigma2. 使用 SENSOR PARAMETERS 的,这个也分为两种:i.SENSOR PARAMETERSImage ID, Parameter Original Original Residual Adjusted Adjusted Ground Pt Name Value Sigma Value Value Sigma 704_1613ADJUSTED PARAMETERSCamera X M,Ft511404.4010000.000-0.0131930511404.38no sigmaCamera Y M,Ft320317.6310000.0000.003003332
32、0317.63no sigmaCamera Z M,Ft1678.1510000.0000.00819441678.16no sigmaOmega Deg-0.0790.000-0.0000542-0.07no sigmaPhi Deg0.2490.000-0.00039730.24no sigmaKappa Deg2.3690.0000.00002602.36no sigmaUNADJUSTED PARAMETERSIO a0 P4.72no sigmaN/AN/Ano sigmaIO a1 P/MM-0.05no sigmaN/AN/Ano sigmaIO a2 P/MM-47.61no
33、sigmaN/AN/Ano sigmaIO b0 P-9.98no sigmaN/AN/Ano sigmaIO b1 P/MM47.61no sigmaN/AN/Ano sigmaIO b2 P/MM-0.05no sigmaN/AN/Ano sigmaOFF X M,Ft0.00no sigmaN/AN/Ano sigmaOFF Y M,Ft0.00no sigmaN/AN/Ano sigmaOFF Z M,Ft0.00no sigmaN/AN/Ano sigmaOFF X M,Ft/S0.00no sigmaN/AN/Ano sigmaOFF Y M,Ft/S0.00no sigmaN/A
34、N/Ano sigmaOFF Z M,Ft/S0.00no sigmaN/AN/Ano sigmaii.SENSOR PARAMETERSImage ID, Parameter OriginalOriginal ResidualAdjustedAdjustedGround Pt NameValue Sigma ValueValueSigma0.073548921.81 no sigma0.9193099879.47 no sigma1.040-0:01:04.4671931.03 no sigma-0:31:34.577no sigma+0:00:38.231+0:07:23.008no si
35、gma-0:01:13.236+35:30:00.295no sigma3_42 Camera X M,Ft 548921.74 10000.000Camera Y M,Ft 3099878.5510000.000Camera Z M,Ft 1929.99 10000.000Omega Deg -0:30:30.110 +90:00:00.758Phi Deg +0:06:44.777 +90:00:00.758Kappa Deg +35:31:13.531 +90:00:00.758使用SENSOR PARAMETERS的格式中,控制点记录为:GROUND POINT PARAMETERSI
36、mage ID, Number Parameter Original Original Residual Adjusted Adjusted Ground Pt Images Name ValueSigma Value Value Sigma704_1613_62 x ( Tie)511201.445 10000.000-0.002511201.443no sigmay321295.55110000.0000.002321295.553no sigmaz35.90410000.0000.00535.909no sigmaP70109 2x ( XY Cntrl)511769.9520.225-
37、0.214511769.738no sigmay316795.9940.225-0.273316795.721no sigmaz38.55310000.0000.32038.874 no sigmaP70113 2x (XYZ Cntrl)521567.1600.2250.003521567.163no sigmay316794.282 0.225-0.264 316794.018 no sigmaz22.5520.2250.09022.642 no sigmaCam 相机参数Focal Length (mm)213.710000Principal Point Offset xpoff ypo
38、ff in mm1.000000e-02 3.000000e-03How many fiducial pairs (max 8):4Fiducial x,y pairs in mm105.997000 -105.991000-105.998000 -105.993000-106.003000 105.997000106.001000 105.995000Symmetrical Lens Distortion Odd-order Poly Coeffs c0,c1,c2,c3 (c0=offset) 0.000000e+00 0.000000e+00 0.000000e+00 0.000000e
39、+00 Decentering Lens Coeffs p1,p2,p30.000000e+00 0.000000e+00 0.000000e+00How many distortion pairs (max 20):0Distortion Data Units (m=radial dist im mm, d=field angle in deg): mDistortion Data Pairs, if any (Radius in mm or deg, Distortion in Microns) Data Strip Side:1Ipf 像点文件IMAGE POINT FILE52pt_i
40、d,val,fid_val,no_obs,l.,s.,sig_l,sig_s,res_l,res_s,fid_x,fid_y 4_441_19 1 1 1-3348.941162 -4325.9243161.173470 1.173470 -0.023843 0.174597 -108.927124 83.5726854_441_20 0 0 0 -3069.727051 -4606.664062 0.000000 0.0000000.000000 0.0000000.000000 0.000000纯粹外方位元素的导入:1. 数据准备:准备好原始影像、相机文件、外方位元素文件(文件格式目前可支
41、持两种形 式,举例如下:) 提供线元素、角元素的文件,文件形式举例如下(文件内容必须包含片号、Sx、 Sy、SZ、PHI、OMEGA、KAPPA。可以存在其他信息,以上内容顺序可以颠倒, 文件头部可以添加描述信息,但是片号、Sx、Sy、SZ、PHI、OMEGA、KAPPA的 部分应该有规则)IDSxSySzOPK2597-38088.863-94180.2551868.730-0.5700-0.8077-0.22052598-37065.941-94179.2781868.803-0.5589-1.8964-0.28242599-36043.244-94161.7721867.709-0.68
42、17-1.59772.15962600-35036.296-94128.0061869.126-0.9995-1.59311.8307 提供线元素及旋转矩阵的文件,文件形式举例如下(文件内容必须包含片号、 Sx、 Sy、SZ、旋转矩阵9参数。可以存在其他信息,以上内容除线元素外旋转矩阵参 数顺序不能颠倒,文件头部可以添加描述信息,但是片号、Sx、Sy、SZ、旋转矩 阵 9 参数的部分应该有规则)50760.00000000500158.387754185090.711501760.199450.9939692641230.101990960050-0.040285804522-0.100873
43、7997140.994480608743028858194081 0.043006726324 -0.024620375758 0.9987713745340.02637 0.0303850750.000000000.00893500385.202640.9931335105920.0911325318660.9958325799630.4170.3830.1934185087.669581768.72752-0.073353198811-0.091144174815003195634636 0.073338731496 0.003512024931 0.9973009055160.02513
44、0.023920.007320.3380.3600.1442. 建立工程,添加影像,影像内定向处理;3. 导入外方位元素:1. 选择“影像”节点,在右键菜单中选择“编辑外方位元素”菜单,即进入外方位 元素编辑界面。2.选择打开文件按钮,即弹出如下对话框:3. 设置需要打开的文件的格式,在右边的下拉列表中选择导入的文件格式(以旋转 矩阵为例,则选择“旋转矩阵”)角度-鶴度-400 角度-弧度 龍转矩阵4. 选择“打开”按钮,选择需要打开的外方位元素文件,如下图:打开查找范围:|dataDemoData.ORI_I images Z1 STEREO_|TMP哥 camera.txt 岂 contr
45、ol.txtDemoData, dxf文件容:文件类型(X):取消引入外方位元素|二打旺二寸 开始 I 头部偏移I 重置 I 删除 I I旋转矩阵二 |Fhi Qmegw 确定 |100020.0000000082917.94589182893. 16481815.742640.998747703941-0.0495919506930.0066077453220.049601T665840998T681893T1-0.0013299068T0-0.0065336531550.0016559972740.9999TT284267100010.0000000082041.6996182880. 5
46、4091816.831100.998194580622-0.059605416848-0.0074009120390.05964784930109982034844360.00565134790T0.007050T65238-0.0060825933400.999956643444200020.0000000083076.31019181488.05051T37.654430.9993873187300.033153928080-0.011216247819-0.0332172186790999432998909-0.0055042778260.0110273997630.0058734780
47、150.999921946309ID MAIN| ID ASSI| X| Y| Z| XI 1 5. 先选择一栏特征文本,然后选择“开始”按钮,如下图:6. 点击开始按钮后,即将特征文本选到中间的编辑框中7. 在中间的编辑框中,鼠标指向某个特征文本,选择右键菜单指定相关参数,如下 图:8. 指定完某特征后,即可将文件中相关特征提取出来放入下方列表中:9. 下图为指定完成后的形式:10. 完成后选择“确定”按钮,即可将外方位元素导入,开始关联原始影像11. 若原始影像编号与外方位元素文件中的编号一致,则可以选择“自动关联”按钮一次完成关联,如果不一致,用户则需要手工选中对应的栏,然后选择按钮加入
48、到左边的列表中,下图为关联后的结果:12. 关联完成后,选择“确定”按钮,即可完成了导入的过程,下图为导入后的结果:起始页 A0PEDIT2 X丁 -A i.+ 1.57079632679489662 36 40IDX1 1Z丨PhiOmegaKapa1000182041.699600182880.5409001816.8311000.007401-0.0056510.0596841000282917.945890182893.1648001815.742640-0.0066080.0013300.0496221000383829.516850182885.1692001804.380260-
49、0.0106090.0004090.0508612000182121.000540181489.7791001733.9274600.0097100.003965-0.0212082000283076.310190181488.0505001737.6544300.0112170.005504-0.0332242000383975.585910181475.7250001736.430570-0.0005690.014696-0.021704常见问题及注意事项: 在导入以上几种系统的空三成果后,一般都可以自动将加密点的像点坐标导入本系统中,除 VirtuoZo 空三成果外,其他系统的空三成果导
50、入后都必需重新做一次内 定向,方可在相对定向界面中查看像点; 由于涉及到影像旋转的问题,部分空三成果如JX4、ZI、LH等的空三成果导入后, 可能会发生即使重新做完内定向,在相对定向界面中显示像点坐标位置也不对应的 现象,出现此问题一般是由于其他系统中加密时影像的读取方式与本系统中不一致 导致,这时应该将所有导入的像点删除,只使用导入的外方位元素; 导入其他系统的空三成果时,如 JX4、 ZI、 LH 等系统空三成果,如果这些系统使 用的主点偏移不为0 (及x、y至少有一个不等于0),则导入的像点不能直接使用。00解决办法有两种(VirtuoZo空三成果不存在该问题;导入PATB成果时,应该使
51、用 以下第二种方法):1. 导入本系统后,设定相机文件主点偏移为0,重新做影像的内定向,然后重新 做单模型的绝对定向;(这样会与其他系统提供的外方位元素存在一定的差异, 如果单模型定向结果没有超限,结果是可用的)2. 导入本系统后,设定相机的主点偏移与原空三系统一致,重新做影像的内定向,这样导入的像点坐标将会与原来的系统中指向的点位在相对定向界面中看到 的会不一样。所有导入的像点必须删除,重新做相对定向划定核线范围,不能 使用单模型定向的结果,只能使用导入的外方位元素。 由于涉及到影像旋转,转角系统不一致的问题,导入的外方位元素可能不可以直接 使用,用户可以做以下尝试来调整外方位元素;1. 在
52、导入其他系统成果后,建立相应的立体模型,选择一个模型进入相对定向 界面,若导入的成果中不包含相对定向成果,用户需要先做相对定向,然后 保存相对定向结果,退出相对定向界面。2. 选择该模型节点,在右键菜单中选择“调整方位”菜单,程序根据相对定向 结果自动尝试调整影像的外方位元素。一般情况下,可通过此法自动完成该 模型的外方位元素调整(注意:此法仅针对单模型处理,调整前需确保模型 中任一影像之前未做过此调整方可使用,因此,当工程中存在多幅影像时, 对于相邻的模型,由于会公用一张影像,当调整了其中一个模型后,相邻的 模型不得使用此法再做调整,否则可能会得到错误的结果)调整完该模型后, 应该间隔一个模
53、型调整,这样可避免此问题发生。或者,当调整完一个模型后,用户根据调整前外方位元素与调整后的外方位 元素对照找到调整的规律(一般一条航带中调整的规律一致),然后手工编辑其他影像的外方位元素,具体编辑方法可参考外方位元素编辑。外方位元素编辑1. 选择“影像”节点,在右键菜单中选择“编辑外方位元素”菜单,即进入外 方位元素编辑界面。2.选择需要编辑的栏(支持Ctrl +A全选、Ctrl+鼠标左键多选、Shift+鼠标左键多选),然后选择相关功能,如下图:交换(分别在左右两个下拉列表中选择需要交换的列参数如X、Y,然后选择按钮口,交换列(可能给出的大地坐标系左手系坐标,本系统使用 数学坐标系右手系,因
54、此可能出现需要交换X、Y)取反(在左边的下拉列表中选择需要取反的列参数,如Phi,然后选择按钮,取反 (一般情况下,国外系统使用 Omega/PHI/Kappa 转角系统而本 系统使用-PHI/Omega/Kappa转角系统,因此导入后可能需要在PHI角上取 反)加常数(在左边的下拉列表中选择需要加常数的列参数,如Kappa,在右边的下拉列表中选择加入的常数值(PI/2、PI、3*PI/2)然后选择按钮 加常数(一般情况下,如果影像旋转180度,则在Kappa上加常数PI,如 果旋转 90 度则加 PI/2)400 梯度转 360 度:360 度转 400 梯度:1000182041.699600182880.5409001816.831100-0.005651|U.Ubybb41000282917.945890182893.1648001815.7426400.0496221000383829.516850182885.1692001804.3802600.0508612000182121.000540181489.7791001733.927460-0.0212082000283076.310190181488.0
- 温馨提示:
1: 本站所有资源如无特殊说明,都需要本地电脑安装OFFICE2007和PDF阅读器。图纸软件为CAD,CAXA,PROE,UG,SolidWorks等.压缩文件请下载最新的WinRAR软件解压。
2: 本站的文档不包含任何第三方提供的附件图纸等,如果需要附件,请联系上传者。文件的所有权益归上传用户所有。
3.本站RAR压缩包中若带图纸,网页内容里面会有图纸预览,若没有图纸预览就没有图纸。
4. 未经权益所有人同意不得将文件中的内容挪作商业或盈利用途。
5. 装配图网仅提供信息存储空间,仅对用户上传内容的表现方式做保护处理,对用户上传分享的文档内容本身不做任何修改或编辑,并不能对任何下载内容负责。
6. 下载文件中如有侵权或不适当内容,请与我们联系,我们立即纠正。
7. 本站不保证下载资源的准确性、安全性和完整性, 同时也不承担用户因使用这些下载资源对自己和他人造成任何形式的伤害或损失。
