 电机功率转矩计算
电机功率转矩计算

《电机功率转矩计算》由会员分享,可在线阅读,更多相关《电机功率转矩计算(17页珍藏版)》请在装配图网上搜索。
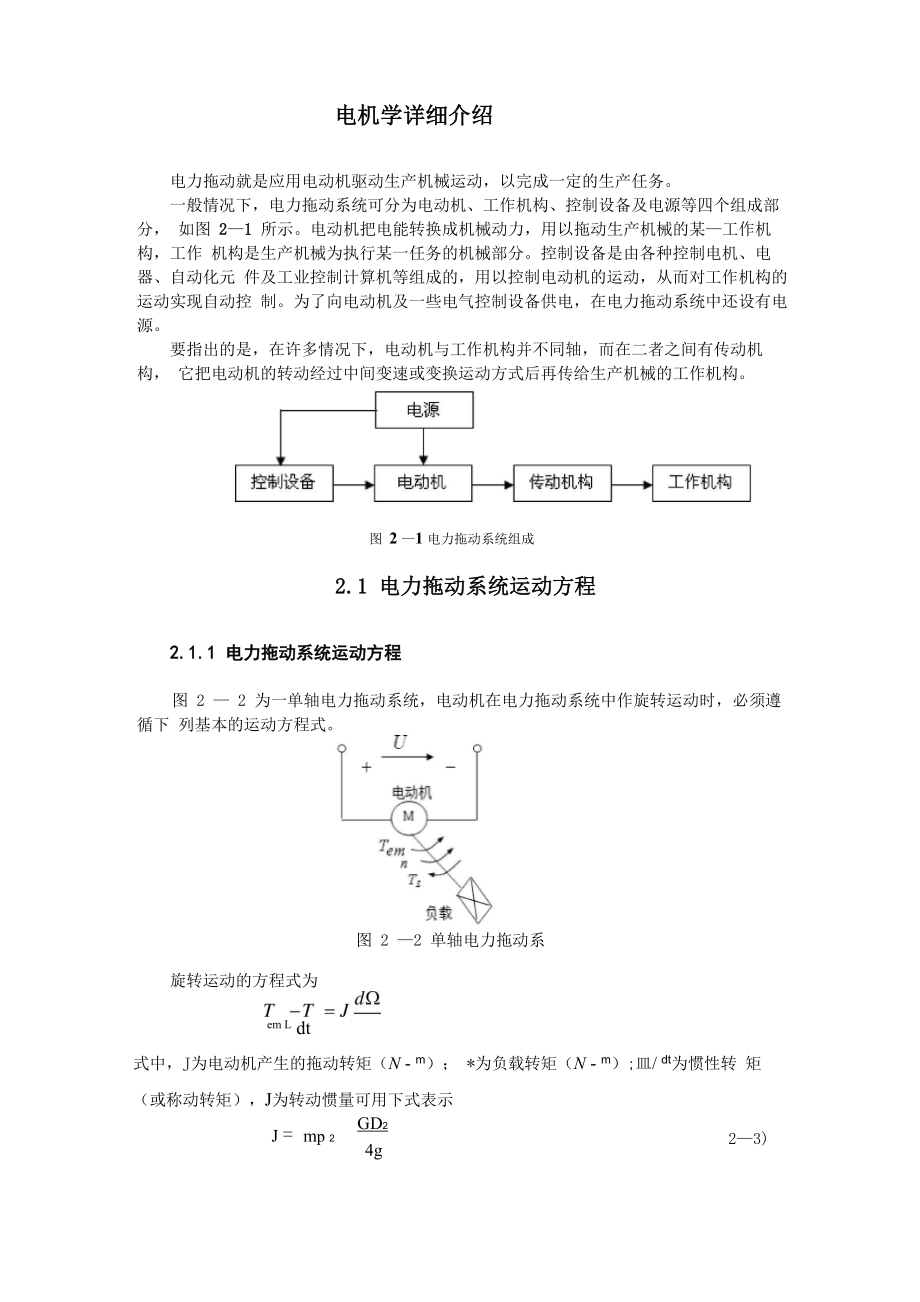
1、电机学详细介绍电力拖动就是应用电动机驱动生产机械运动,以完成一定的生产任务。一般情况下,电力拖动系统可分为电动机、工作机构、控制设备及电源等四个组成部分, 如图 21 所示。电动机把电能转换成机械动力,用以拖动生产机械的某工作机构,工作 机构是生产机械为执行某一任务的机械部分。控制设备是由各种控制电机、电器、自动化元 件及工业控制计算机等组成的,用以控制电动机的运动,从而对工作机构的运动实现自动控 制。为了向电动机及一些电气控制设备供电,在电力拖动系统中还设有电源。要指出的是,在许多情况下,电动机与工作机构并不同轴,而在二者之间有传动机构, 它把电动机的转动经过中间变速或变换运动方式后再传给生
2、产机械的工作机构。图 2 1 电力拖动系统组成2.1 电力拖动系统运动方程2.1.1 电力拖动系统运动方程图 2 2 为一单轴电力拖动系统,电动机在电力拖动系统中作旋转运动时,必须遵循下 列基本的运动方程式。图 2 2 单轴电力拖动系统旋转运动的方程式为em L dt式中,J为电动机产生的拖动转矩(N - m); *为负载转矩(N - m);皿/ dt为惯性转 矩(或称动转矩),J为转动惯量可用下式表示J = mp 2GD24g23)式中,m、G分别为旋转部分的质量(炮)与重量(N); p、D分别为转动惯性半径与直径(m ); g为重力加速度,g二9.18m / s2 ; J的单位为kg -
3、m 2。需要说明的是,式(22)中忽略了电动机本身的损耗转矩T ,认为电动机产生的电 0 磁转矩全部用来拖动负载。这一点将在以后的内容详细介绍。在实际计算中常用式(22)的另一种形式。即将角速度2兀n/60 (0的单位为 rad/s,n的单位为r/min)代入式(22)得运动方程式实用形式:GD2 dnT - T =(24)em L 375 dt式中,GD 2为飞轮矩(N - m 2 ),GD 2二4 gJ ;系数375是具有加速度量纲的系数。电动机的转子及其他转动部件的飞轮矩GD2的数值可由相应的产品目录中查到,但是 应注意将单位Kg - m2化成国际单位制N-m2 (乘以9.81 )。1)
4、2)(3)当 T T 二 0,em L当 T T 0,emL当 T T 0,电力拖动系统处于加速过渡过程状态中; dtdn石0,电力拖动系统处于减速过渡过程状态中。2.1.1 运动方程式中转矩的符号分析应用运动方程式,通常以电动机轴为研究对象。由于电动机运转状态的不同以及生产机械负载类型的不同,电动机轴上的拖动转矩T及负载转矩T不仅大小不同,方向也是变化 emL的。运动方程式可写成下列一般形式:(土T ) - (T )=emLGD 2 dn375 dt25)式(25)中拖动转矩T及负载转矩T前均带有正负符号,并作如下规定:emL如设定电力拖动系统的正方向,则拖动转矩T的方向如果与所设定的正方向
5、相同,T emem前带正号,相反时带负号。在式(25)中,由于负载转矩(土T )前已带有负号,因此其正 L负号的规定恰与拖动转矩T的规定相反。即当负载转矩T的方向与设定的旋转正方向相同 emL时,负载转矩卩厶前取负号,相反时则取正号。本书的计算中,均规定电力拖动系统的正向电动机转向为系统的正方向。不太通顺上面的规定也可归纳为:拖动转矩T与规定正向相同取正,相反取负;负载转矩T与 emL规定正向相同取负,相反取正。惯性转矩JdG/dt的大小及正负符号由拖动转矩T及负载转矩T的代数和来决定。 emL2.2 复杂电力拖动系统的简化实际拖动系统的传动轴常是多根,如图23 (a)所示,图中采用三个轴把电
6、动机角速 度Q变成符合于工作机构需要的角速度O 。在不同的轴上各有其本身的转动惯量及转速, g也有相应的反映电动机拖动的拖动转矩及反映工作机构工作的负载转矩。通常只要把电动机 轴作为研究对象即可。因此,需要进行折算,即把实际的拖动系统等效为单轴系统。折算的 原则是:保持折算前后系统传送的功率及储存的动能不变。这样图23 (a)所示的多轴系 统就折算为图23 (b)所示的单轴拖动系统,分析计算大为简化。如图23 (a)中所示电力拖动系统中,以电动机轴为折算对象,需要折算的参量为:工作机构转矩T,传动机构的转动惯量J,工作机构的转动惯量J 。对于某些作直线运g1g动的工作机构,还必须把进行直线运动
7、的质量及运动所得克服的阻力折算到电动机轴上去。a)(b)图 2 3 电力拖动系统示意图(a)传动图;(b)等效折算图2.2.1 工作机构为旋转运动的简化一、工作机构转矩的折算设一个两轴传动机构,如图24所示。折算前工作机构转矩为T,折算前工作机构转 g轴的角速度为O。折算到电动机转轴后工作机构转矩为T,折算到电动机转轴的角速度为gz。折算的原则是系统的传送功率不变。-二L 工作机构图 2 4 两轴系统的折算示意图若不考虑中间传动机构的损耗。按传送功率不变的原则,应有如下的关系:27)TTT =g = gz(2)j0g28)式中,j为电动机轴与工作机构轴间的转速比,j = 0/0二n/n。 g传
8、动机构如系多轴齿轮或带轮变速,而已知每级速比为八厶、厶,则总的转速比为各级速比的乘积,即29)故ji ;在在一般设备上,电动机多数是高转速的,而工作机构轴是低转速的, 些设备上,如高速离心机等,电动机的转速比工作机构轴的转速低,这时j 1。若考虑中间传动机构的损耗,按传送功率不变的原则,应有如下的关系TT 二亠(210)z川式中,耳为传动机构总效率,等于各级传动机构效率乘积,即n =nnn123考虑中间传动机构的损耗,传动机构转矩损耗at为TTat = 7 - 4(211)jn j在图 23所示的电力拖动系统中,负载由电动机拖着转,电磁转矩为拖动性质转矩, aT 由电动机负担。二、传动机构与工
9、作机构转动惯量和飞轮矩的折算在多轴系统中,必须将传动机构各轴的转动惯量J、J、J及工作机构的转动惯量123J折算到电动机轴上,用电动机轴上一个等效的转动惯量J (或飞轮矩GD2)来反映整个拖 g动系统转速不同的各轴的转动惯量(或飞轮矩)的影响。各轴转动惯量对运动过程的影响直接反映在各轴转动惯量所储存的动能上,因此折算必须以实际系统与等效系统储存动能相等为 原则。当各轴的角速度为。、叮O2、。3、g时得下列关系:212)213)-JQ 2 = - J 2 + - J 2 + 1 J 2 + + 1 J 2122 d2112222 g gd化成用飞轮矩及n (r/min)表示的形式,考虑到GD2二
10、4gJGD 2 = GD 2 +dGD21- I niGD2+ 2- n 丫 I 丁丿2GD2+ 214)一般情况下,在系统总的飞轮矩中,占最大比重的是电动机轴上的飞轮矩,其次是工作 机构的上的飞轮矩的折算值,占比重较小的是传动机构各轴上的飞轮矩的折算值。在实际工 作中,为了减少折算的麻烦,往往采用下式估算出系统的总飞轮矩:215)GD2 二 d + 5)GD2d式中, GD2 为电动机轴上的飞轮矩;5 为若电动机轴上只有传动机构中第一级小齿轮时, d5 = 0.2 0.3,若电动机轴上有其他部件如抱闸等,5的数值需要加大。例21图23所示的电力拖动系统中,已知电动机的飞轮矩GD2 14.5N
11、 m2, d传动机构的飞轮矩GD2 18.8 N m2,工作机构的飞轮矩GD2 120N m2,传动机构的1g效率耳0.91,耳0.93,工作机构 的转矩T 85N m,转速n 2450r / min,12gn 810r / min , n 150r/min 忽略电动机空载转矩,求:1g(1)折算到电动机轴上的系统总飞轮矩GD 2 ;(2)折算到电动机轴上的负载转矩T。z解:(1)折算到电动机轴上的系统总飞轮矩18.8+18.8(2450|2(2450|1 810 丿150 丿-17 N m 22GD 2GD2GD 2 GD 2 + + 14.5 +d ( n 2 ( 2 n I 丨 n II
12、 n12)折算到电动机轴上的负载转矩z jng_85-(2450150丿x 0.91 x 0.93=6.15 N - m2.2.2 工作机构为直线运动的简化某些生产机械具有直线运动的工作机构,如起重机的提升机构,其钢绳以力F吊质 g量为役的重物Gg,以速度u等速上升或下降,如图25所示。另外,如刨床工作台带动工件前进,以某一切削速度进行切削,也是直线运动机构的例子。无论是钢绳拉力或刨床切削力都将在电动机轴上反映一个负载转矩T,折算原则以传 z 送功率不变。以图 25 为例,介绍折算方法。一、工作机构转矩的折算 若不考虑传动损耗,折算时根据传送功率不变,可写出如下关系式T 0 二 F u(216
13、)zg g把电动机角速度0(rad /s)换算成转速n(r/min),0 = 2兀n/60,贝yF uF u =9.55-(217)z 2兀 n/60n式中,F为工作机构直线作用力(N ); u为重物提升速度(m/s ); T为力F折算为电 ggzg动机轴上的阻转矩。若考虑传动损耗,折算时根据传送功率不变,可写出如下关系式FuT = 9.55t g(218)zn n式中,n为传动机构总效率,等于各级传动机构效率乘积,即n =nnn。 123当电动机提升重物时,传动机构损耗的转矩由电动机承担;当下放重物时,传动机构损耗的转矩由负载承担;提升重物时传动机构的效率为耳,下放同一重物时传动机构的效率
14、a为b,它们之间的关系为1耳二 2 -(219)b 耳a下放同一重物时电动机的负载转矩为F uT 二 9.55 g g n(220)zn b二、工作机构质量的折算以图25为例,重物G上升或下放中,在其质量m中储存着动能。由于重物的直线gg运动由电动机带动,是整个系统的一部分,因此必须把速度u (m/s)的质量m折算到电 gg动机轴上。用电动机的上的一个转动惯量为J的转动体与之等效。折算的原则是转动惯量J及质量m中储存的动能相等,即g221)把0 = 2nn/60, (GD2)= 4gJ代入化简可得:222)(GD 2) = 365例22 图25所示的起重机中,已知减速箱的速比j = 34,提升
15、重物时效率n = 0.83,卷筒直径d = 0.22m,空钩重量G = 1470N,所吊重物G = 8820N,电动 a0g机的飞轮矩GD 2 = 10N - m2,当提升速度为u = 0.4m/s时,求 dg(1) 电动机的转速;(2) 忽略空载转矩时电动机所带的负载转矩;(3) 以u = 0.4m/s下放该重物时,电动机的负载转矩。g60un = j x gKd解:(1)电动机的转速=34x 60x0.4 = 1180.5r/min 兀 x 0.222)忽略空载转矩时电动机所带的负载转矩FuT = 9.55t gznn=9.55(G + G )u0gnn9(1470+ 8820) x 0.
16、41180.5 x 0.83=40.12 N - m以。g二0.4m /s下放该重物时下放同一重物时传动机构的效率11耳二 2 -二 2 - 二 0.795 b 耳0.83a电动机的负载转矩1180.5T 二 9.55 工耳二 9.55 x(。兰 8820) 乂 兰 x 0.795 二 26.47N m zn b2.3 电力拖动系统的负载特性在运动方程式中,负载转矩T与转速n的关系T = f (n)称为负载转矩特性。负载LL转矩T的大小和多种因素有关。以车床主轴为例,当车床切削工件时切削速度、切削量大 L小、工件直径、工件材料及刀具类型等都有密切关系。大多数生产机械的负载转矩特性可归 纳为三种
17、类型,恒转矩负载特性、恒功率负载特性和风机、泵类负载特性。2.3.1 恒转矩负载特性所谓恒转矩负载特性,就是指负载转矩T与负载转速n无关的特性,当转速变化时,L转矩T保持常值。恒转矩负载特性多数是反抗性的,也有位能性的。L反抗性恒转矩负载特性的特点是,恒值转矩T总是与运动方向相反。根据第二章第一L节中对T正负符号的规定,当正转时n为正,转矩T为反向,应取正号,即为(+ T);L L L而反转时n为负,转矩T为正向,应变为(-T );如图26所示。显然,反抗性恒转矩LL负载特性应在第一与第三象限内。皮带运输机、轧钢机、机床的刀架平移和行走机构等由摩 擦力产生转矩的机械,都是反抗性恒转矩负载。位能
18、性恒转矩负载特性则与反抗性恒转矩负载特性不同,它由拖动系统中某些具有位能的部件(如起重类型负载中的重物)造成。其特点是转矩T具有固定的方向,不随转速方L向改变而改变。如图27所示,不论重物被提升(n为正)或下放(n为负),负载转矩T始L终为反方向(+ T )。特性在第一与第四象限内,表示恒值特性的直线是连续的。L_ Tl没标图 2 6 反抗性恒转矩负载特性图 2 7 位能性恒转矩负载特性实际中的机床刀架等机构在平移时,负载的性质基本上是反抗性恒转矩负载,但从静 止状态起动及当转速还很低时,由于润滑油没有散开,静摩擦系数较动摩擦系数大,摩擦阻 力较大。另外,当传动机构在旋转时,有一些油或风的阻力
19、,带通风机负载的性质,导致在 转速较高时,负载转矩会略见增高。考虑到这些因素后,机床平移机构的实际负载特性如图 28 所示。2.3.2 恒功率负载特性一些机床,如车床,在粗加工时,切削量大,切削阻力大,此时开低速;在精加工时, 切削量小,切削力小,往往开高速。在不同转速下,负载转矩基本上与转速成反比,切削功 率基本不变,即2兀nP = T Q = T= 0.105T n = K(222)L L L 60 L式中,K为常数;PL为负载(切削)功率(W )。可见负载转矩Tl与转速“呈反比切削功率基本不变特性曲线呈恒功率的性质。恒功率负载特性如图29所示。从图中可以看出A点所对应的阴影面积与B点所对
20、应的相等。图 2 9 恒功率负载特性2.3.3 泵类负载特性风机、泵类负载的转矩与转速大小有关,基本上与转速的平方成正比222)T 二 Kn 2L式中, K 为比例常数。风机、泵类负载特性如图210 所示。属于通风机负载的生产机械有通风机、水泵油泵等,其中空气、水、油等介质对机器叶片的阻力基本上和转速的平方成正比。实际生产机械的负载转矩特性可能是以上几种典型特性的综合。例如,实际通风机除了主要是通风机负载特性外,由于其轴承上还有一定的摩擦转矩T0,因而实际通风机负载特性为T = T + Kn 2,如图211所示。L0 除了上述几种类型的生产机城外,还有一些生产机械具有各自的负载特性,如带曲柄连
21、杆机构的生产机械,它们的负载转矩卩厶随转角而变化;而球磨机,碎石机等生产机械,其 负载转矩则随时间作无规律的随机变化等等。*2.3.4 电力拖动交通车辆的阻力曲线电力拖动的交通车辆是另一种典型的电力拖动系统。列车的运行阻力包括基本阻力和附 加阻力。一、基本阻力 基本阻力主要由轴承摩擦阻力、车轮与钢轨耦合产生的滚动阻力和滑动阻力、车轮与钢 轨的冲击与震动产生的阻力,空气阻力。由于构成基本阻力的因素很多,一般通过大量的试 验确定对不同型号和编组的列车的经验公式近似表征列车的基本阻力。如城市轨道交通系统 中的广州地铁列车基本阻力计算式为w = 2.755 + 0.014v + 0.00075 v 2
22、(223)0式中,w0为单位基本阻力,即每单位列车重量(kN )的基本阻力(N ),表示为(N/kN); v为列车运行速度。当已知列车总重的kN数以后,不难计算列车的总基本阻力。基本阻力 曲线如图 212所示。图 2 12 列车基本阻力曲线图 2 12 中,纵坐标表示列车运行速度,横坐标表示阻力。二、附加阻力 附加阻力是线路或隧道等原因形成的,包括坡道附加阻力、曲线附加阻力和隧道附加 阻力。坡道附加阻力是当机车、车辆在坡道上运行时,其重力沿坡道方向的分力引起的;曲 线附加阻力是因为机车、车辆通过曲线时,车轮和钢轨产生的摩擦引起的;隧道附加阻力是 由隧道空气对机车、车辆产生额外阻力。其中曲线附加
23、阻力和隧道附加阻力无论列车运行方向如何,其阻力值始终为正;坡道附 加阻力在列车上坡时为正,下坡时为负。所以列车在长大下坡时的附加阻力可能会达到负值, 如图 213 所示。图 2 13 长大下坡时的单位附加阻力三、合成阻力 合成阻力就是列车的总阻力,包括基本阻力和附加阻力。将图212 和图 213 的 阻力合成,可得合成阻力曲线如图214 所示。从图 214 可以看出,列车阻力可以为负值。这一阻力特性在城市无轨电车、城市 轨道交通车辆和电力机车牵引的干线铁路车辆中常常可以遇到。2.4 电力拖动系统的稳定运行的条件电力拖动系统稳定运行包含两重含义:一是系统应能以一定的转速匀速运转,二是系统 受某种
24、外部干扰(如电压波动、负载转矩波动等)使转速稍有变化时,应保证在干扰消除后, 系统能恢复到原来的运行速度。为保证系统能以一定转速匀速运行必要条件是电动机轴上的拖动转矩T和负载转矩emTl大小相等,方向相反,相互平衡。在T - n坐标平面上,这意味着电动机的机械特性曲线n二f (T )和生产机械的机械特性曲线n = f (T )必须有交点,如图215所示。emL图 2 15 稳定工作点的判别图中曲线 1 为异步电动机的机械特性,曲线2 为电动机拖动的生产机械的机械特性(恒转矩负载)。两特性曲线有a和b两个交点,两个交点是拖动系统的平衡点。负载的机械特性曲线与电动机特性存在交点只是保证系统稳定运行
25、的必要条件还不是充分条件。下面判断a点是否是稳定平衡点。先假设系统在a点稳速运行,此时电机的电磁转矩T等于负载转矩T,即T =T。emL ema L当系统出现干扰,例如负载转矩突然从 T 增加到 T 时,使电机转矩小于负载转矩,即LLT T ,转速n上升,L em L从电动机的机械特性的AB段可看出,电机的电磁转矩又随n的上升而减小,直至回到最初的稳定状态,到T =T,系统重在a点运行。可以看出,当干扰消除后,系统重新回到ema L原来的运行点a。所以a点是系统的稳定平衡点,即稳定工作点。而稳定平衡点b的情况不同。当系统在b点运行时T =T,当系统出现干扰时,例emb L如负载转矩突然升高到T
26、,电机转矩必然由T 上升到T ,转速由n变为n,电动机Lembemb bb的运行点从b点变为b 点。当干扰消除以后,T T,转速n上升,从电动机的机械特emb L性的BC段可看出,而T又随n的上升而增加,电磁转矩T更加大于负载转矩T,电动 em em L机的转速还要上升,系统非但不能回到平衡点b,而是远离平衡点。显然b点不是稳定点。从以上分析可以总结出:电力拖动系统稳定运行的充分必要条件是:(1) 电动机机械特性曲线n = f (T )和生产机械的机械特性曲线n = f (T )有交点(即拖动系统的平衡点),即em LT = T ;(2)在平衡点所对应的转速之上应有T T ,即em LdTLd
27、n224)dTdn小结本章主要研究电力拖动系统中电动机和生产机械之间的关系问题,具体体现在拖动转矩T 和负载转矩 T 的关系上,用电力拖动运动方程式来表示,即emLT _ t = GD 2 dnem L 375 dt一个实际的电力拖动系统往往是多轴的,因此需要把传动机构、工作机构的转矩、力、 飞轮矩和质量折算到电动机轴上,电动机和生产机械就成为同轴联接的系统,有着同样的转 速。n二f (T )的方程式或曲线称为电动机的机械特性,n = f (T )的方程式或曲线则称为emL负载转矩特性。利用电动机的机械特性和负载的机械特性,可以清楚地分析电力拖动系统的 各种运行状态。思考题1 如何从电力拖动运
28、动方程式判断系统是处于加速、减速、稳速运行状态? 2 已知某电动机的机械特性如图216中曲线1所示,请问该电机分别与负载特性2、 特性3、特性4这三种配合时,平衡点A、B、C、D中哪些是稳定的,哪些是不稳定的?3 电力拖动系统的负载特性有哪些?4 简述列车运行的速度阻力关系习题1如图217所示的某车床电力拖动系统中,已知切削力F = 2000N,工件直径 d二150mm,电动机转速n二1450r/min,减速箱的三级速比j = 2,j = 1.5,j3 = 2,123各转轴的飞轮矩 GD 2 = 3.5N - m2 , GD 2 = 2N - m2 , GD 2 = 2.7N - m2 ,d1
29、2gd 2 二9n-m2,总传动效率n =nn n 二0.9,求:g 1 2 3(1) 切削功率;(2) 电动机输出功率(3) 系统总飞轮矩;(4) 忽略电动机空载转矩时,电动机电磁转矩;(5) 车床开车但未切削时,但电动机的加速度dn/dt = 800r/(mins),忽略电动机空载转矩时,不忽略传动机构的转矩损耗,求电动机电磁转矩。盘讣冬2口:减速箱图 2 17 题 3 图2 起重机的传动机构如图218 所示,图中各部件的数据见表21,已知起吊速度 为12m/min,起吊重物时传动机构效率n = 0.7。请计算:(1) 折算到电动机轴上的系统总飞轮矩;(2) 重物吊起及下放时折算到电动机轴
30、上的总负载转矩、传动机构的转矩损耗;(3) 空钩吊起及下放时折算到电动机轴上的总负载转矩。图 2 18 起重机的传动机表 2 1 起重机的传动机构各部件的数据编号名称齿数ZGD2(N - m2)重力N直径/mm1电动机5.592蜗杆双头0.983齿轮152.944蜗轮3017.055卷筒98.005006齿轮65294.007导轮3.921508导轮3.92871509吊钩49010重物196003.某电力拖动系统,已知其速度曲线如图219所示,已知负载转矩T二100N -m,L请画出电磁转矩T的曲线。emn0/T(Nt/mn图 2 19 题 3 图4.某电力拖动系统如图220所示,m = 1050Kg,直径d = 800mm,电动机转速g如图所示,减速箱的速比 j 二 j / j 二 40,n = 0.62, J = 20Kgm2, J 二 0.25Kgm2,d ggd请画出电动机电磁转矩T的曲线。电动机/.Onz 、7-800T(N M/mn图 2 20 题 4 图
- 温馨提示:
1: 本站所有资源如无特殊说明,都需要本地电脑安装OFFICE2007和PDF阅读器。图纸软件为CAD,CAXA,PROE,UG,SolidWorks等.压缩文件请下载最新的WinRAR软件解压。
2: 本站的文档不包含任何第三方提供的附件图纸等,如果需要附件,请联系上传者。文件的所有权益归上传用户所有。
3.本站RAR压缩包中若带图纸,网页内容里面会有图纸预览,若没有图纸预览就没有图纸。
4. 未经权益所有人同意不得将文件中的内容挪作商业或盈利用途。
5. 装配图网仅提供信息存储空间,仅对用户上传内容的表现方式做保护处理,对用户上传分享的文档内容本身不做任何修改或编辑,并不能对任何下载内容负责。
6. 下载文件中如有侵权或不适当内容,请与我们联系,我们立即纠正。
7. 本站不保证下载资源的准确性、安全性和完整性, 同时也不承担用户因使用这些下载资源对自己和他人造成任何形式的伤害或损失。
