《让你的树莓派动起来——双H桥直流马达连接》由会员分享,可在线阅读,更多相关《让你的树莓派动起来——双H桥直流马达连接(10页珍藏版)》请在装配图网上搜索。
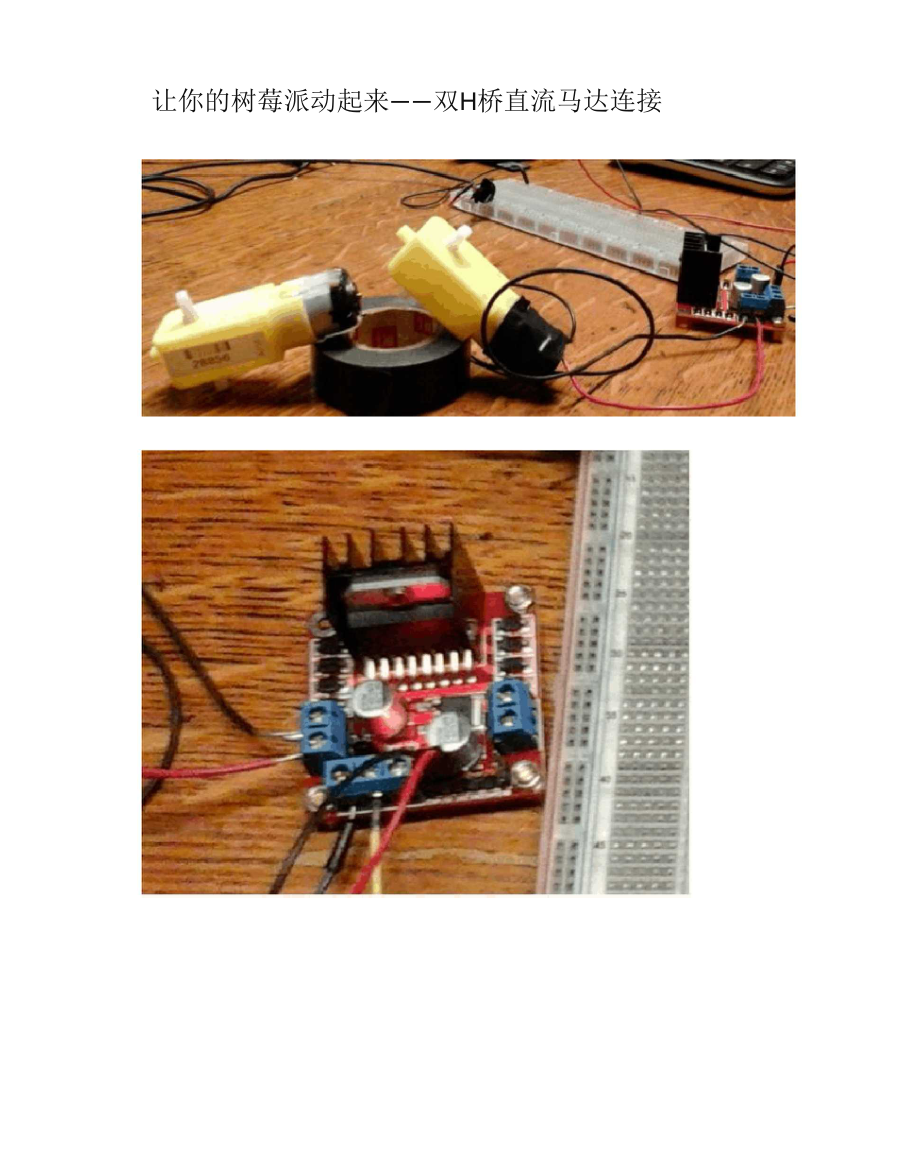
1、让你的树莓派动起来一一双H桥直流马达连接0 pawerMlzDDl* 门QnNEErr。L 岸讯w+nELIr+c3KWJOSa 19 I 7 :!gisu、 捋s 1、pyrhon応站来回琳-画般罟出蓉芦介绍:什么是H桥?怎么改变直流电机的运转方向?大家应该都知道调换电源方向就能改变直流电机方向吧。但是想用电路来 改变电机方向,就要用到 H 桥。H桥对初学者来说是比较重要的,而L298N芯片是双H桥电路板的简单 入门。这意味着你能分别控制两个电机的方向。所需材料:控制器:5块双桥直流步进电机驱动控制器板模块Arduino L298N 双 H 桥驱动芯片(L298N Logical volta
2、ge: 5V Drive voltage: 5V-35V Logical current: 0mA-36mA Drivecurrent:2A(MAX single bridge) Storage temperature: -20 to +135 Max power: 25W)电动机(马达)工作电压:3V12V直流(最好在6V8V)最大扭距: 800gf 厘米每分钟 (3V)空载速度: 1:48 (3V time)负载电流:70mA (最大250mA) (3V)马达和EMC抗干扰能力:没有单片机干扰尺: 7x2.2x1.8cm 存在误差)步骤一:准备直流电源和电动机不用我说上哪找吧?电动机拆个玩
3、具就有了,外面随便买的电池4 个就 有 6V 了,直流的。当然如果你要用大型电动机,千万要注意安全电压。这里就用个小的。GND步骤二:连接器连接电动机的方向驱动RASPBERRY PI Revision 2 PinouthttpJwww.p inbal Isp. do mGroundmi I则in I TTITFnfflTrilT 占UART-RTSGroundCFI023GFI024Gumund联” i 口 ” I树莓派上的总线扩展器引脚是用来“触发” L298N方向的。步骤三:用面包板来简化连接步骤四:Python代码下面是简单的代码片段基本的开关引脚的Python代码片段:import
4、RPi.GPIO as GPIO # Use GPIO n umbers not pin n umbersGPIO.setmode(GPIO.BCM)# set up the GPIO cha nn els - one in put and one output GPIO.setup(7, GPIO.IN)GPIO.setup(8, GPIO.OUT)# in put from GPIO7in put_value = GPIO.i nput( 7)# output to GPIO8GPIO.output(8, True)电动机代码(motor.py):# Import required lib
5、rariesimport sysimport timeimportRPi.GPIO as GPIO# Use BCM GPIO refere nces# in stead of physical pin n umbers#GPIO.setmode(GPIO.BCM)mode二GPIO.getmode()pri nt mode = + str(mode)GPIO.clea nup()# Define GPIO signals to use# Physical pins 11,15,16,18# GPIO17,GPIO22,GPIO23,GPIO24StepP inF orward = 16Ste
6、pPi nBackward = 18sleeptime=lGPIO.setmode(GPIO.BOARD)GPIO.setup(StepPi nForward, GPIO.OUT) GPIO.setup(StepP in Backward, GPIO.OUT)def forward(x):GPIO.output(StepPi nForward, GPIO.HIGH) pri nt forward ing running motor time.sleep(x)GPIO.output(StepPi nForward, GPI O.L OW)def reverse(x):GPIO.output(St
7、epPi nBackward, GPIO.HIGH) pr in t backward ing running motor time.sleep(x)GPIO.output(StepPi nBackward, GPI O. LOW) pri nt forward motor forward(5)pr in t reverse motor reverse(5)pr in t Stopp ing motorGPIO.clea nup()在树莓派上运行命令使电动机运转:sudo python motor.py 输入以下代码规范进程:GPIO.setup(Motor1E,GPIO.OUT) pr in t Tur ning motor onGPIO.output(Motor1A,GPIO.HIGH)第五步:故障排除排除工具:电压表和 Code snippets 软件恩接下来你就可以尽情发挥它的作用了。毕竟小车小船小玩具什么的,都 要用到电机啊
 让你的树莓派动起来——双H桥直流马达连接
让你的树莓派动起来——双H桥直流马达连接