《第四章-离散PID控制器ppt课件》由会员分享,可在线阅读,更多相关《第四章-离散PID控制器ppt课件(36页珍藏版)》请在装配图网上搜索。
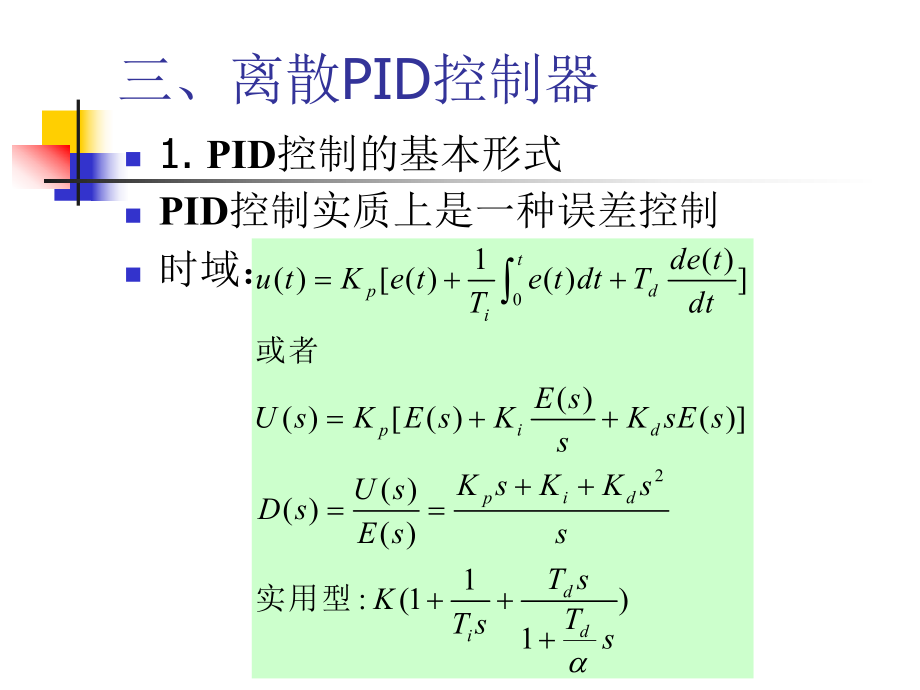
1、三、离散PID控制器n1.PID控制的基本形式nPID控制实质上是一种误差控制n时域:021()()()()()()()()()()()1:(1)1tpdipidpidddide tu tKe te t dtTTdtE sU sKE sKK sE ssK sKK sU sD sE ssT sKTT ss或者实用型n其中:Kp,Ki,Ti,Td分别为:比例系数、积分系数,积分时间常数,微分时间常数,是滤波器时间常数,消除高频的噪声 分别称为:比例系数,积分系数,微分系数dT,dpipdpiTTKKKKKTTn离散化:n实用型:01111 21()()()()()()()()()()(1)(1)(
2、1)()()()1kdpjidpipidTTu kTKe kTe jTe kTe kTTTTT E zz E zE zTE zU zKTzTKzKKzU zD zE zz11()11,/DpidDddTTzD zKT zT zTTTTTTTT 2.PID控制输出形成n(1)位置式 缺点:隐藏全部的历史数据e(kT-jT)如有问题,故障扰动太大。(2)增量式u(kT)=u(kT)-u(kT-T)=Kpe(kT)+Kie(kT)+Kde(kT)-e(kT-T)0()()()()()kdjiTTu kTK e kTe jTe kTe kTTTT 其中e(kT)=e(kT)-e(kT-T)e(kT-T
3、)=e(kT-T)-e(kT-2T)误差的误差n(3)速度式(目的均衡采样周期与输出大小,实际工程中很少使用)()()u kTv kTT3.PID系数对系统性能的影响nPID控制的性能关键在于合理的选择PID参数即Kp,Ki,Kdn(1)Kp增大速度 振荡超调量稳定性 Kp过大振荡增多,调节时间变长可能出现不稳定现象n(2)Ki(Ti)引入稳定性,速度 Ki太大(Ti太小)系统将不稳定,振荡次数增多,Ki 太小,对系统性能的影响减小,Ki 消除静差n(3)Kd合适引入速度,稳定性,超调调节时间缩短nTd过大或过小导致超调量增大,调节时间加大4.PID控制器的几种改进形式n(1)对输出量微分n(
4、作用,克服输入突变对系统和输出量的扰动)1:1 0.1ddT sDT s实用的 r PIuDyn(2)对偏差微分(对给定值和输出量同时进行微分)r PIuDyn(3)对输出量的比例微分 r PDuIy n(4)不完全微分PID控制1()11()()()()()()()fftpdoifGsT sde tu tKe te t dtTTdtdu tu tTu tdt其中 =+_+_()U t()U tRC等效差分后解得:或:()()(1)()()()(1)()ffu kTu kTTu kTu kTu kTTu kTTTT n(5)积分分离的PID控制 为了避免长时间的积分,控制量进入深度饱和,积分分
5、离的PID控制是一种有效实用方法000()()()()()1|()|0|()|kpeidjeu kTK e kTK Ke jTK e kTe kTTe kTEKe kTEn(6)带死区的PID控制0|()|()0 PIDe kTee kT时 输出不变5.微分项的平滑算法n在数字控制中,微分环节对整体系统性能带来很大的好处,但起动和输入、输出发生变化时会产生很大的冲击n如:微分环节()()()()()()()()dddU sT sE sTukTe kTe kTTTe kTr kTy kTn当起动和输入、输出变化时,e(kT)与e(kT-T)相差很大。这时ud(kT)很大;对于惯性较大的系统,经过
6、一个T后,即e(kt+T)与 e(kT)相差很小,这时ud(k t+T)0。n平滑方法之一:取四点以t0为中心进行平滑滤波.n方法:其中t0=(kT-1.5T)n平滑微分输出0000()()()()()41.50.5()(2)()(3)0.51.5 ()3()3(2)(3)6dddTe kTe te kTTe tukTTTe te kTTe te kTTTTTe kTe kTTe kTTe kTTT6.手动到自动无扰切换n实现方法n当手动时,系统已稳定,相当于t即z1n所以从 到 的稳态增益为1n当处于自动时:n为PI调节器,K为手自动匹配系数,为动态常数,由于积分器的存在,即可以实现无扰动切
7、换。()u kT()u kT11()()1()111(1)Ke kTu kTKe kTzzz7.数字PID调节器参数的整定n(1)扩充临界比例度法选择PID参数 a.纯比例控制,选择T调节Kp b.加大Kp,使系统振荡,确定临界振荡的Ks和振荡周期Ts c.选择控制度(即数字系统与模拟系统性能的相当程度)n定义:控制度 为1.05时数字系统与模拟系统性能相当d.查表确定PID参数如 一组值,Kp=0.63Ks,Ti=0.49Ts,Td=0.14Ts2020minminDAe dte dtn(2)扩充响应曲线法选择PID参数a.确定系统飞升曲线 其中:为纯迟后时间,Tm为系统的时间常数b.确定与
8、Tm,求出比值c.查表决定PID参数0ty(t)mTmTn(3)PID一参数的整定法n可以写成n可以理解成为三次不同时刻误差的加权求和再放大n加权系统d0,d1,d2有固定关系012()()()(2)pu kTKd e kTd e kTTd e kTT0121(12)diddTTdTTTdTTdT n1)确定Ts,纯比例控制临界振荡周期,可以通过实验或模型仿真求得n2)可以通过经验确定T,Ti,Td 如 T=0.1Ts Ti=0.5Ts Td=0.125Tsn3)现场调整Kp根据性能指标的要求,这种方法也是实现PID自整定的基础。n1.控制原理 实际工程系统中大纯滞后的现象十分普遍,系统中出现
9、大纯滞后对象,系统很难稳定,很难实现预定的控制指标,过去的模拟控制方法也很难解决这一类问题,在数字控制中也出现了较多的控制算法,Smith预估器一种常用的方法。四、大纯滞后补偿控制n大纯滞后对象的典型传递函数:补偿方法:()()spH sGs en要使反馈环节中真实反映控制器输出的情况不产生大的滞后 ,则 n即将真实的对象输出信号进行恰当补偿后再送入反馈端,便于运算控制器合理掌握实际的控制信息。n便于将补偿环节控制器中实现,将其进行等效前移。se()()(),()()(1)sspppGs eG sGsG sGse闭环控制系统框图为控制器等效的闭环传递函数为()()()1()()sppD s G
10、s esD s Gs等效的闭环系统框图为从图中可以看出,在反馈通道中串入了一个纯超前环节 的控制系统,即对输出信号经过一个纯超前环节形成反馈信号 后再进入调节器。在时间上超前于输出信号,即将要对实际信号预估而产生,使调节器产生超前的控制作用,所以Smith补偿器又称为Smith预估器。se()y t()()y ty t2 控制系统的实现算法(1)计算系统的偏差()()()e kr ky k(2)计算Smith预估器的输出()y k对于一个典型的纯滞后系统()()1sspmKG sGs eeT s为对象的增益;为被控对象的时间常数;为纯滞后时间;KmT由于一般的控制系统都是低通特性,可以写成221111()411sseesss这时预估器的等效结构为经过Z变换得112()(1)()2()(1)()22()()()mmmTTz kz ku kTTTTTz kz kz kTTy kK z kz k(3)计算调节器的输入(4)计算调节器的输出(5)输出 给被控对象,回到第一步;()()()ce ke ky k0()(1)1()()()kccpccdiie ke ku kKe ke iTTT()u k
 第四章-离散PID控制器ppt课件
第四章-离散PID控制器ppt课件