 AGV系统结构设计以及动力学建模型
AGV系统结构设计以及动力学建模型

《AGV系统结构设计以及动力学建模型》由会员分享,可在线阅读,更多相关《AGV系统结构设计以及动力学建模型(11页珍藏版)》请在装配图网上搜索。
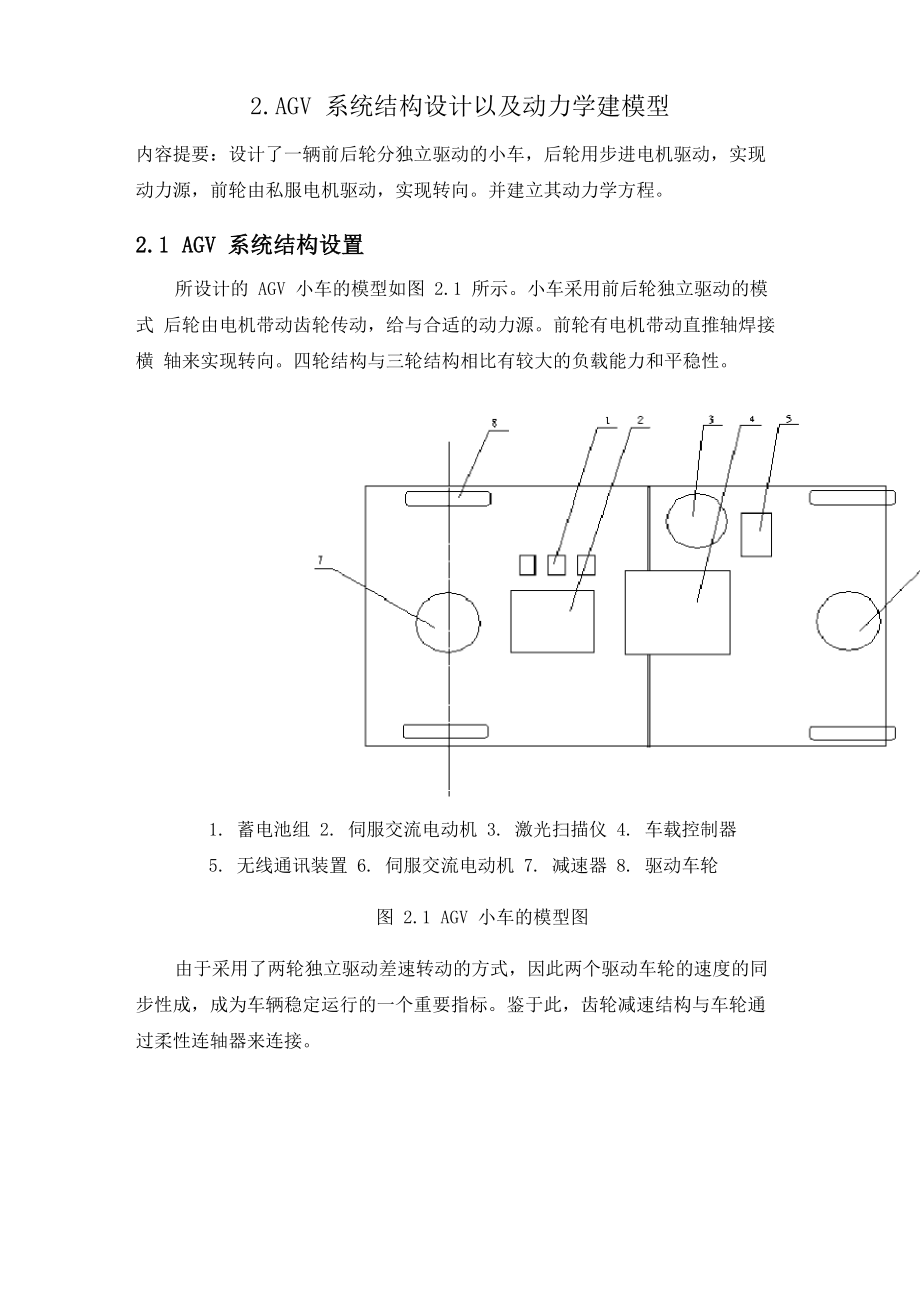
1、2.AGV 系统结构设计以及动力学建模型内容提要:设计了一辆前后轮分独立驱动的小车,后轮用步进电机驱动,实现 动力源,前轮由私服电机驱动,实现转向。并建立其动力学方程。2.1 AGV 系统结构设置所设计的 AGV 小车的模型如图 2.1 所示。小车采用前后轮独立驱动的模式 后轮由电机带动齿轮传动,给与合适的动力源。前轮有电机带动直推轴焊接横 轴来实现转向。四轮结构与三轮结构相比有较大的负载能力和平稳性。1. 蓄电池组 2. 伺服交流电动机 3. 激光扫描仪 4. 车载控制器5. 无线通讯装置 6. 伺服交流电动机 7. 减速器 8. 驱动车轮图 2.1 AGV 小车的模型图由于采用了两轮独立驱
2、动差速转动的方式,因此两个驱动车轮的速度的同 步性成,成为车辆稳定运行的一个重要指标。鉴于此,齿轮减速结构与车轮通 过柔性连轴器来连接。2.2 AGV 小车的动力学建模自从 A G V 问世以来,人们在自动导引车的控制过程中一般满足于基于运 动学的控制模型,而很少有人进行基于动力学的控制设计等方面的内容。事实 表明,根据AGV车体动力学模型,可以得到直接的电机输入与行走、导向车轮 转速的非线性的耦合关系,将对指导车体机械结构设计、路径规划以及合理的 路径跟踪控制规律设计有重要而且深远的意义。由于 A G V 在实际问题中有较严格地面要求的环境中运动,车速较低,限 定了加速度的问题,而不会发生明
3、显的车体“上跳”运动的现象出现,故可以 在二维空间来研究其动力学模型。现以我以后轮为电机带动齿轮来实现动力驱 动的方式传达力矩,前轮则为由电机直接带动轴的转动从而达到转动的方式来 实现转向的AGV为例建立动力学模型。AGV由车体、蓄电池和充电系统、驱动装置、转向装置、精确停车装置、 车上控制器、通信装置、信息采样子系统、超声探障保护子系统、移载装置和 车体方位计算子系统等等组成。“智能”较高的 AGV 都有车上控制器,它类似于机器人控制器,用以对 AGV进行监控。控制器计算机通过通信系统从地面站接受指令并报告自己的状 态。通常监控器可完成以下监控:手动控制、安全装置启动、蓄电池状态、转向 极限
4、、制动器解脱、行走灯光、驱动和转向电机控制和充电接触器等。某些 AGV 具有编程能力,允许小车离开导引路径,驶向某个示教地点,完成任务后 路原道返问到导引路径上来根据上述的介绍,我们可以不难看出同步行进的四轮AG V机械结构分为 以下几个部分 :车体部分:包括车架、蓄电池、驱动电机、转向电机和齿轮减速机构等, 车体受到由后轮传动来的驱动力和前轮的反作用力的作用。驱动后轮:所受的外力可能有两部分组成。一部分是地面的作用力:另一 部分是来自车体给于的外力。其中这部分力包括自身的支撑反力和电机产生的 等效驱动力矩等。通过齿轮改变转速来调节速率可以得到不用的转速,从而改 变 AGV 的的运动行进方向,
5、已经更好的做到预定的线路跟踪。前轴和连轴:起到支撑作用,同时车轮和竖轴是同轴的,前轮的转动有地 面给于的摩擦力也有电机传递的力矩。2.2.1 车体运动建模车体受力的示意图见图 2.2。图中 L、A 为驱动左后轮、和驱动右后轮与车 体的连接处。图中的 R、B 为导向左前轮和导向又前轮与车架连接处的垂直点。 车体在L、R、A、和B处分别是受到图示沿X、Y方向的阻力和沿Z方向的扭矩。 C则为车体的重心,通过C建立起瞬时惯性坐标系O-XYZ,X轴则平行于L=R的 连线,Z轴垂直于车体的平面。b、b、a、a、c、c为车体集合参数,121212v、v和w分别表示的是车体质心的X向、Y向的速度和Z向的角速度
6、。xy在经过了上述的假设的基础之上,我们不难可以得到车体动力学方程如下:m v = F + F + F + F(2.1)c *xAXBXLXRXm v = F + F + F + F(2.2)c *yAYBYLYRYj w = - M - M - M - F b - F cc AZBZRZ AX 1 AY 1-F b + F c + F b - F a + F b + F a(2.3)BX 1 BY 2 LX 2 LY 1 RX 2 RY 2上面式子中m 和j分别为车体质心的质量和转动惯量。车体的前轮A、B处cc的运动方程为v = v 一 b wAX x 12.4)v =v -c w AY y
7、 12.5)v =v -cwBX x 12.6)v = v + c wBY y 22.7)v = v 一 b w + c w 2*AX*x1 *12.8)v = v 一 c w 一 b w2AY J 1 12.9)v = v 一 b w 一 c w 2 *BX*x1 22.10)v = v + c w 一 b w2BY 2 12.11)车体 L 和 R 处运动的方程为:v = v + b wLX x 22.12)v = v -awLY y 12.13)v = v +b w + aw2LX *x 2 12.14)v = v - a w + b w2LYy1 *22.15)v = v + b wR
8、Y *x 22.16)v = v + a wRY *x 22.17)v = v + b w - a w 2RX*x 2 22.18)v = v + a w + b w2RY*y2 2(2.19)2.2.2 驱动后轮的运动建模左后轮受力图见图2.3所示,图中瞬时惯性坐标系L- X YZ与图2.2的L L L方向是一致的,可以认为是由O-XYZ平移到L点从而形成的坐标系,F、F、M与图2.2中的F、F、M 相对应,他们是车体与左轮之间大小Lx LyLzLX LYLZ相等方向相反的作用力(力矩)和反作用力(力矩)。M是驱动电机经过齿L轮减速后传递给左轮的驱动力矩, M 是轴承对左轮的摩擦阻力矩, M
9、 是SLLV滚动阻力矩,F是地面对左轮的侧滑动摩擦力,戸是轴承对左轮的滚动摩LXSL擦力,M是地面对车轮的扭矩摩擦力矩,w是左后轮的转动角速度(XLZLL为转动轴)。丸FUS?.J左后总矍力由左后轮动力学方程为M v = F FL LXLX LX(2.20)M v = F + FL LYLY LY(2.21)J w = M M F R MLX LLSL LY LLF(2.22)J w = M MLZ LZLZLZ(2.23)上式中,M、J、J、R分别是左后轮的质量以及其沿着旋转轴X的转L LX LZ LL动惯量、沿着Z轴的转动惯量和半径。V、V为其在L-XYZ坐标下的速度,LLX LY与车体对
10、应点的速度是同一值。W 是左后轴沿Z轴的扭转角速度。LZL对于右后轮来说,传动齿轮啮合是在轴中心处,故左右受的力是相同的因此建立类似的动力学方程为:M v = F FR RYRX RX(2.24)M v = F + F(2.25)R RY RY RYJ w = M M F R M(2.26)RX RRSR RY RRFJ w = M M(2.27)RZ * RZRZRZ上述各式中,有关物理量的具体意义同对左后轮的说明类似,这里就不 做过多说明了。由于 AGV 速度和加速度均较小的原因,轮子的侧滑阻力很大 假设其中的v二V二0。这样看来车体将以位于左右轮轴线上的某一点MLX RX为瞬时速度中心,
11、以角速度w转动,我们根据所了解的知识,我们不难看出 一点,通过左右轮转动计算,根据下图2.4所示:即:v = 一 wv*LXLV(2.28)v = wv RYRY2.29)将以上的2个式子带入(2.14),(2.18)中可以看到2.30)w = RYLYa + a12v 一 v w =RYLYa + a12(2.3.1)将 v = v = 0 代入式子( 2.12 )和式子( 2.13 )即可得 LX RXv = 一 b wX2v = v + awY LY 1(2.33)式子(2.14)和式子(2.15)可改写成v = 一 wv 一 b w 一 a w 2 *XLY 2 12.34)v = v
12、 + a w 一 b w 2 *YLY122.35)式子(2.4)至式子(2.11)变为v = (b + b ) wAX12v = (a c ) w + vAY11LYv = (b + b ) wBX12v = (a + c ) w + vBY12LY2.32)2.36)2.37)2.38)2.39)v = wv (a + c ) w (a c ) w 2*AXLY12112.40)v = v+ (a - c ) w - (a + c ) w 2AY UY11*122.41)v =-wv 一 (b + b )w一 (a + c )w2*BXLY 1211(2.42)v = v + (a + c
13、 ) w 一 (b + b ) w2 by*LY12,12(2.43)2.2.3 车体整体的动力学模型为了能够更好的取得车体整体的动力学模型,根据 AGV 的实际情况作出如下的简化:(1) 左右前轮和轴是一体的,再前行或后退的同时不打滑,只看做是纯滚动,则有:v = R w * v = R wLY L L*LYL *Lv = R w * v = R wRYR R *RY L *L(2) 车体设计左右是对称的,则有:a a a, c c c1 2 1 2(3) 左轮的直径及其质量和右轮R R R, M M ML RLR(4) 前轮左右也是一致的和后轮的大小重量以及有些不受力或比较想的部分我们可以
14、忽略不计其的转动惯量,即:M M M MDGEFJ J J J J J 0D G EX EZ FX FZ在上述简化后的基础上,联立前述车体、左右驱动后轮的动力方程可以得 到车体整体的动力学方程。该动力学方程中可以表示为左、右轮所受的动力 M 、M 和左、右轮转动的角速度 w 、w 之间的关系。L B L R任何一种导引方法的实现最终都归结为路径跟踪控制的问题上。对于固定 路径型的 AGV 由于具有体现路径的导引媒介物,通过传感器就可直接获得车体 对路径的横向偏差和车体方向偏差,以这种偏差作为误差信号通过车体动力学 直接对车体进行跟踪控制。但是对于自由路径型AGV,车体对路径之偏差量的 获取就要
15、困难得多,以车体方位推算导向的自由路径 AGV 为例,其方位和对于 路径的偏差是通过对车轮转动角度积分计算而获得,其要实现需较大的计算量 和通信量。作为一种较好的解决办法是差速驱动的自由路径控制。其路径可简 化为一系列直线段和圆弧段的组合。只要保证左右轮的转动角速度满足给定的 比例关系(即同步误差为零), AGV 就能跟踪这种具有恒定半径(直线和圆弧)的 路径。车体动力学方程是实现差速驱动的理论基础之一,结合模糊控制方法, 可以实现差速驱动路径跟踪过程。2.3 本章小结动力学方程能够帮助AGV的建模、车体结构、刚度设计和路径跟踪控制提 供理论依据的基础。本章主要介绍了所设计及其制作的一辆有电机带动齿轮差 动驱动后轮,前轮有电机直接控制实现转向的的四轮AGV小车,并建立了所需 要的运动学方程。
- 温馨提示:
1: 本站所有资源如无特殊说明,都需要本地电脑安装OFFICE2007和PDF阅读器。图纸软件为CAD,CAXA,PROE,UG,SolidWorks等.压缩文件请下载最新的WinRAR软件解压。
2: 本站的文档不包含任何第三方提供的附件图纸等,如果需要附件,请联系上传者。文件的所有权益归上传用户所有。
3.本站RAR压缩包中若带图纸,网页内容里面会有图纸预览,若没有图纸预览就没有图纸。
4. 未经权益所有人同意不得将文件中的内容挪作商业或盈利用途。
5. 装配图网仅提供信息存储空间,仅对用户上传内容的表现方式做保护处理,对用户上传分享的文档内容本身不做任何修改或编辑,并不能对任何下载内容负责。
6. 下载文件中如有侵权或不适当内容,请与我们联系,我们立即纠正。
7. 本站不保证下载资源的准确性、安全性和完整性, 同时也不承担用户因使用这些下载资源对自己和他人造成任何形式的伤害或损失。
