 第三章典型题解析
第三章典型题解析

《第三章典型题解析》由会员分享,可在线阅读,更多相关《第三章典型题解析(8页珍藏版)》请在装配图网上搜索。
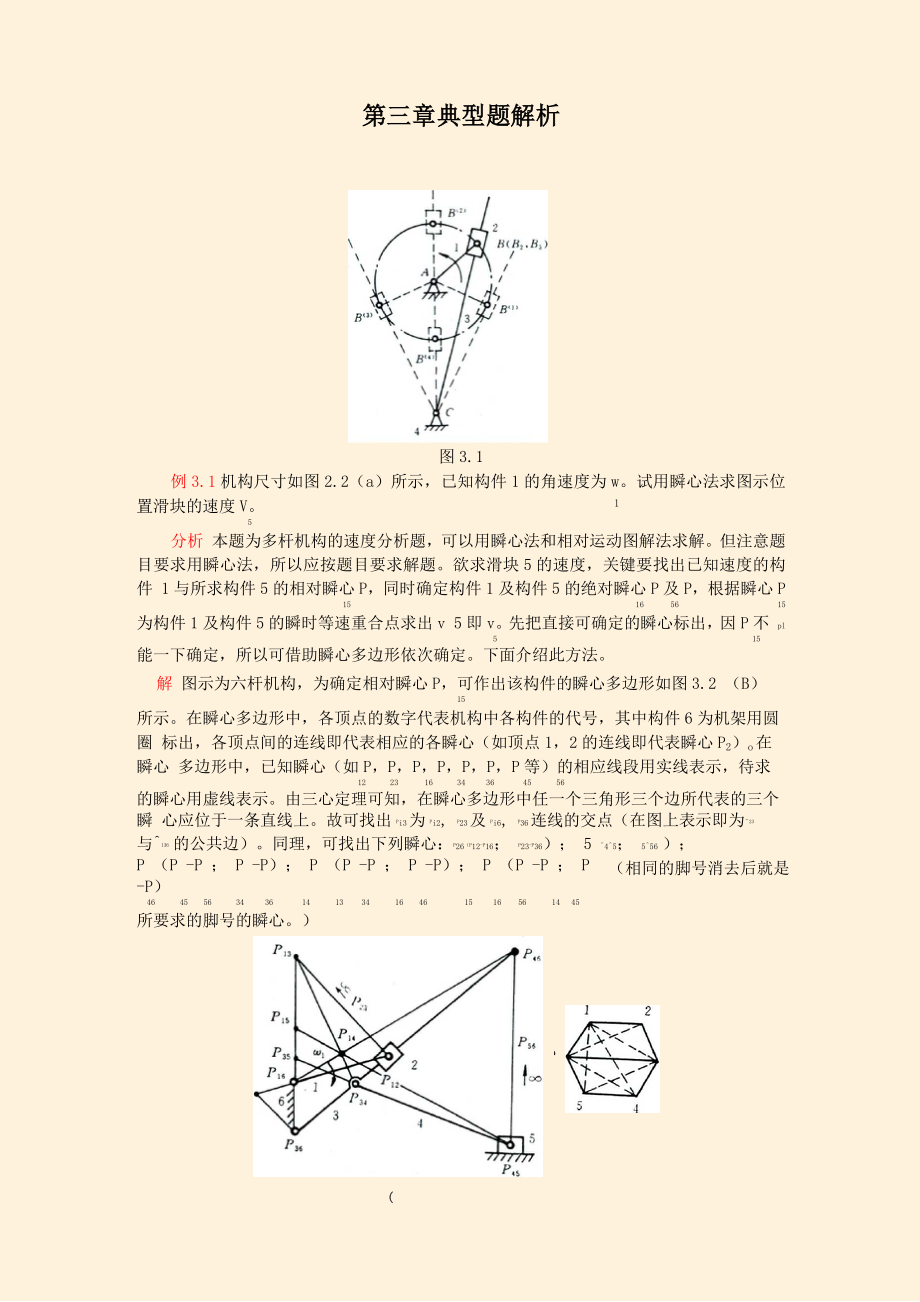
1、第三章典型题解析图3.1例3.1机构尺寸如图2.2(a)所示,已知构件1的角速度为w。试用瞬心法求图示位 置滑块的速度V。15分析 本题为多杆机构的速度分析题,可以用瞬心法和相对运动图解法求解。但注意题 目要求用瞬心法,所以应按题目要求解题。欲求滑块5的速度,关键要找出已知速度的构件 1与所求构件5的相对瞬心P,同时确定构件1及构件5的绝对瞬心P及P,根据瞬心P15165615为构件1及构件5的瞬时等速重合点求出v 5即v。先把直接可确定的瞬心标出,因P不 pl515能一下确定,所以可借助瞬心多边形依次确定。下面介绍此方法。解 图示为六杆机构,为确定相对瞬心P,可作出该构件的瞬心多边形如图3.
2、2 (B)15所示。在瞬心多边形中,各顶点的数字代表机构中各构件的代号,其中构件6为机架用圆圈 标出,各顶点间的连线即代表相应的各瞬心(如顶点1,2的连线即代表瞬心P2)o在瞬心 多边形中,已知瞬心(如P,P,P,P,P,P,P等)的相应线段用实线表示,待求12 231634364556的瞬心用虚线表示。由三心定理可知,在瞬心多边形中任一个三角形三个边所代表的三个瞬 心应位于一条直线上。故可找出Pi3为Pi2, P23及Pi6, P36连线的交点(在图上表示即为23与136 的公共边)。同理,可找出下列瞬心:P26(P12-P16; P23-P36); 5 45; 556 );(相同的脚号消去
3、后就是P (P -P ; P -P); P (P -P ; P -P); P (P -P ; P -P)464556343614133416461516561445所要求的脚号的瞬心。)(a)6图3.2则v =v=wP P (可按图上长度量取距离)P15511516评注对多杆机构进行速度分析,利用速度瞬心是较方便的。当瞬心数目较多时可借 助瞬心多边形法或脚号消去法,依次找出所需瞬心的位置。因瞬心法也属于图解法,所以应 按比例准确画出所求机构位置的运动简图,所需尺寸可直接从图中量取折算。例3.2图3.3 (a)所示齿轮连杆机构中,已知构件1的角速度为W1,求图示位置构件 3的角速度w3。图3.3
4、分析此题为含有高副机构的速度分析题。已知构件1的速度,只要找出相对瞬心P,35 绝对瞬心P ,P,就可根据瞬心的概念求出w3。13 15解 先标出直接可确定的瞬心位置P ,P ,P ,P ,P ,P。现需求出瞬心P ,P ,1215233445141335作出瞬心多边形如图3.3 (b)所示。P在P,P及P,P连线的交点上,P在P,P1312231434353445及P,P连线的交点上。1513由瞬心的概念可知,在等速重合点P13处有v = w P P = w P PP13113 15313 35W=W P P / P P3113 1513 35所需尺寸从图中量取评注在确定组成高副的两构件的瞬
5、心位置时,应分析在接触点处是否为纯滚动。若是 纯滚动,则接触点即为其瞬心;若不是纯滚动,则瞬心在过接触点的公法线上。本题为两齿 轮组成高副,所以接触点处为瞬心。有时题中会注明有无相对滑动速度,由此可判断其瞬心 属于哪种情况。用瞬心法求平面高副机构的速度也较方便。但应注意,瞬心法只能用于求解 速度而不能用来求知速度。例3.3在图3.4 (a)所示机构中,已知各杆长度和w (为常数),l =21。试用相对1 BC CD运动图解法求图示位置构件2及构件5的速度和加速度w2a2打a5。分析 此题有两种分析方法。一是2和3组成移动副把C点作为重合点,由于q点的 速度为0所以v =v 。再根据B点和C点同
6、为构件2上的点可求出v,然后求出v , vC2 C2C32C2D2 D3(v ),v o二是把构件3扩大至B店,使B店成为构件2和3的重合点。求出B点的速度D4E53后用影像法求D点的速度,再由D点的速度求出E点的速度。第二种方法较简捷。下面用第 二种方法求解。AS6 2/3b;(b)k解(1)速度分析。VB3大小?方向丄BC扩大杆3,图3.4则B点可看为构件2和3的重合点,于是有V+B2w l1 AB丄ABVB3B2由于上式中只有两个未知数,故可用图解法求解。 同一构件上两点间速度关系可得。V =E大小?方向水平作出速度图如图(b)所示。/BC选v作图,vD用影像法求得。乂由V+D已知丄DC
7、VED丄DEW2=W3=vB3/lBC= Pb3 P v/lBC,顺时针方向W4=vED/lED= de P v/lED,顺时针方向v =v :5 E=pe p v(2)加速度分析。根据重合点间的加速度关系大小方向anB3已知B-CatB3?丄BCaB2已知BAakB3 B2已知丄BCarB3 B2?/BC选p v作图。其中:=w 211 ABan 二B3WBC ;哥氏加速度 aB b =2W3vB3B23 2,其方向为由vB3B2的矢量沿叫的方向转过90。由加速度影像法求出D点的加速度即Pd p d。根据同一构件上加速度关系有a二Ea+DanED+大小?已知W 214 BD方向水平已知EDa
8、D,图(c)所示为加速度图。atED?丄EDa二a 二 atB3/lBC= n3b3 /lBC,顺时针方向a 二a 二 p 0 a a5 E评注此题是用相对运动图解法进行运动分析的一个典型题,灵活应用扩大构件法可简 化解题过程。应用速度及加速度影像法时要注意其条件,即同一构件上的点才存在影像关系, 并注意在速度图及加速度图中字母的顺序要与机构图中保持一致。同时应特别注意加速度分 析中加速度方向的判断,尤其是作一些特殊位置机构的运动分析时,更要概念清楚。例3.4图3.5 (a)所示为摆动从动件盘形凸轮机构,凸轮为一偏心圆盘,其半径r=30mm, 偏距 e=10mm, l =90mm, l =30
9、mm, w=20rad/s。要求:ABBC1(1) 找出机构所有瞬心;(2) 用瞬心图解法求v ;c(3) 用相对运动图解法求v, a。cc(a)(b)(d?(e)图3.5分析本题为含有高副机构的运动分析题,用相对运动图解法求解时一般先需进行高副低 代。此题中把构件1和2组成的平面高副转化成为一个构件4加两个低副(2和4的移动副 及41和2的转动副),对转化后的机构进行分析是很方便的。解 (1)瞬心P,P,P的位置如图(b)所示。121323(2) 瞬心法。P12为构件1,2的瞬时等速点,为相对瞬心。于是v =w e=w lp1212 BOw=w e/l =20X0.1=2rad/s2 1 B
10、Dv =w l =2 X 0.03=0.06m/sC 2 BC(3) 相对运动图解法。本题为高副机构,用高副低代法得瞬时代替机构,如图O所示。1)速度分析:用扩大构件法,0点为构件2和4的重合点,于是vO2二v+O4vO2O4大小?w l?1 OA方向 竖直竖直/DCv =v =w l =20X0.01=0.2m/s04 O1 1 OA作速度图(d)可知v =v , w=v /l =0.2/0.1=2 rad/s,顺时针方向0204202 BOv =w /l =20 X 0.03=0.06m/sC 2 BC2)加速度分析大小an。2 已知+at。2?an+O4已知akO2O4 已知+ar。2。
11、4?方向0B丄OB0A丄DC/DC其中an =a 2l=0.4m / s 2O22 OBan =w2l=4m/s2, ak=2wv = 0OA1 OAOOA242 42 4用影像法作 po/c -BOC,得c,则有ac = pcy =0.81m/s2u加速度图如(e)所示。评注由此题也可以看出用速度瞬心法作高副机构速度分析的方便性。用相对运动 图解法作平面高副机构的运动分析一般要进行高副低价,所以选择合适的代替机构十分重 要。例3.5已知图3.6 (a)所示机构的各构件尺寸已知,w=1rad/s,试求:w ; V。147分析 题中可直接求出B点及C点的速度,由于构件4上的D点及E点的大小及方向
12、 均未知,所以无法直接求解。此时如果能找出构件4的绝对瞬心P,就可以确定D点及E48点的方向,从而可进一步求出所有点及构件的速度。解 (1)可利用速度瞬心法求w。需确定P的位置,利用图上已知瞬心的位置可先448找出P,P则位于P , P与P,P58连线的交点上,如图2.6 (b)所示。于是14 48181445v =w P P =w P PP14414 48114 18所以 w = P P 1414 48(2) v =v =v ,H7大小方向 式中,vH4得H7 Hgv 二H6?水平 =w lI 4 HP48w / P P =2.1rad/s,与 w 同向114 481丨点为构件4和6的重合点
13、,所以v +H4已知已知,方向垂直于HP。48v vH6 H4?/EH 取“作速度多边形,uv = ph 卩76 v评注对平面III级机构进行运动分析时,常需综合运用瞬心法和相对运动图解法才 能求解。列出的相对运动议程中只有两个未知数时方能作图求解,如未知数多于两个,可考 虑利用绝对瞬心来确定有关矢量的方向。图3.6例3.6在图3.7所示机构中,已知各构件尺寸1 =l,l =l,l =l,l =14,原动件AB 1 AC 2 CD 3 DE1以等角速度w沿逆时针方向转动。用解析法求滑块2对于杆3的相对滑动速度v=s和加1r r速度a=S,杆3,4的角速度w,w和角加速度a,a,以及滑块5的速度
14、v和加速度a。r3434EE(列出方程即可)。分析用解析法进行运动分析的关键是列出机构的位置方程,对位置方程微分可得速 度方程和加速度方程。下面用矢量法求解。解 建立直角坐标系如图3.7所示。(1)机构位置封闭矢量方程为ABC: l+l-S=OCDE: l+l-X=O12 r34 E位置矢量在X, y轴上的投影为ABC: S cos = l cos0 ,S sin = l sin0 +lr3 r1r3 r12CDE: l cos = l cos0- x =0 l sin + l sin0 =03 344B3344由此可解出e ,0 。34(2)对上述位置方程进行微分,可得速度分程v cos0
15、- s w sin0 =-lw sin0r3r 33111v sin0 + s w cos0 = l w cos0 r3r 3311-1 w sin 0 -1 w sin 0 - v = 0,333444 El w cos0 +1 w cos0 = 0v 333444写为矩阵方程为cos 0s sin0r300vl w sin 03sin 0s cos0r300rw1 11l w cos03l sin0l sin0131 1 103344w0l cos0l cos00403344vL E J0:3)对速度方程微分可得加速度方程s (w2 cos03r 33+ a sin 0 )=33a cos
16、0 v w sin0 v w sin0r3r 33r 3lw2 cos01 1 1a sin0 + v w cos0 + v w cos0 + s (w2 sin0 + a cos0 )=r3 r 33 r 33 r3333l w 2 sin 01 1 1l w2 cos0 l a sin0 l w2 cos0 l a sin0 a = 03333 334444 44Ecos 0s sin0r300a3sin 0s cos0r300ra3l sin0l sin01303344al cos0l cos00403344aL E34444写为矩阵形式为3333 3l w2 sin0 +1 a cos0 l w2 sin0 +l a cos x0 = 04sin a0s sin0r30l cos01 12v wcos0s cos0r30l cos01 1r 303l sin0l sin00w 233344l cos0l cos00w 2033444w 2L 1 评注可见问题最后归结为求解方程组的问题,现在用计算机可以方便地完成。解 析法的好处是能很快作出所有位置的运动分析,所以越来越多地被采用。
- 温馨提示:
1: 本站所有资源如无特殊说明,都需要本地电脑安装OFFICE2007和PDF阅读器。图纸软件为CAD,CAXA,PROE,UG,SolidWorks等.压缩文件请下载最新的WinRAR软件解压。
2: 本站的文档不包含任何第三方提供的附件图纸等,如果需要附件,请联系上传者。文件的所有权益归上传用户所有。
3.本站RAR压缩包中若带图纸,网页内容里面会有图纸预览,若没有图纸预览就没有图纸。
4. 未经权益所有人同意不得将文件中的内容挪作商业或盈利用途。
5. 装配图网仅提供信息存储空间,仅对用户上传内容的表现方式做保护处理,对用户上传分享的文档内容本身不做任何修改或编辑,并不能对任何下载内容负责。
6. 下载文件中如有侵权或不适当内容,请与我们联系,我们立即纠正。
7. 本站不保证下载资源的准确性、安全性和完整性, 同时也不承担用户因使用这些下载资源对自己和他人造成任何形式的伤害或损失。
