 极点及系统稳定性
极点及系统稳定性

《极点及系统稳定性》由会员分享,可在线阅读,更多相关《极点及系统稳定性(6页珍藏版)》请在装配图网上搜索。
1、极点对系统性能影响一控制系统与极点 自动控制系统根据控制作用可分为:连续控制系统和采样控制系统,采样系统又叫离 散控制系统。通常把系统中的离散信号是脉冲序列形成的离散系统,称为采样控制系统。连 续控制系统即指控制量为连续的模拟量如时变系统。系统的数学模型一般由系统传递函数表达。传递函数为零初始条件下线性系统响应(即 输出)量的拉普拉斯变换(或z变换)与激励(即输入)量的拉普拉斯变换之比。记作(S) =Xo (s) /Xi (s),其中Xo (s)、Xi (s)分别为输出量和输入量的拉普拉斯变换。使传递函数分母等于零即得到系统的特征方程,sn + a sn-i + a s + a = 01n-1
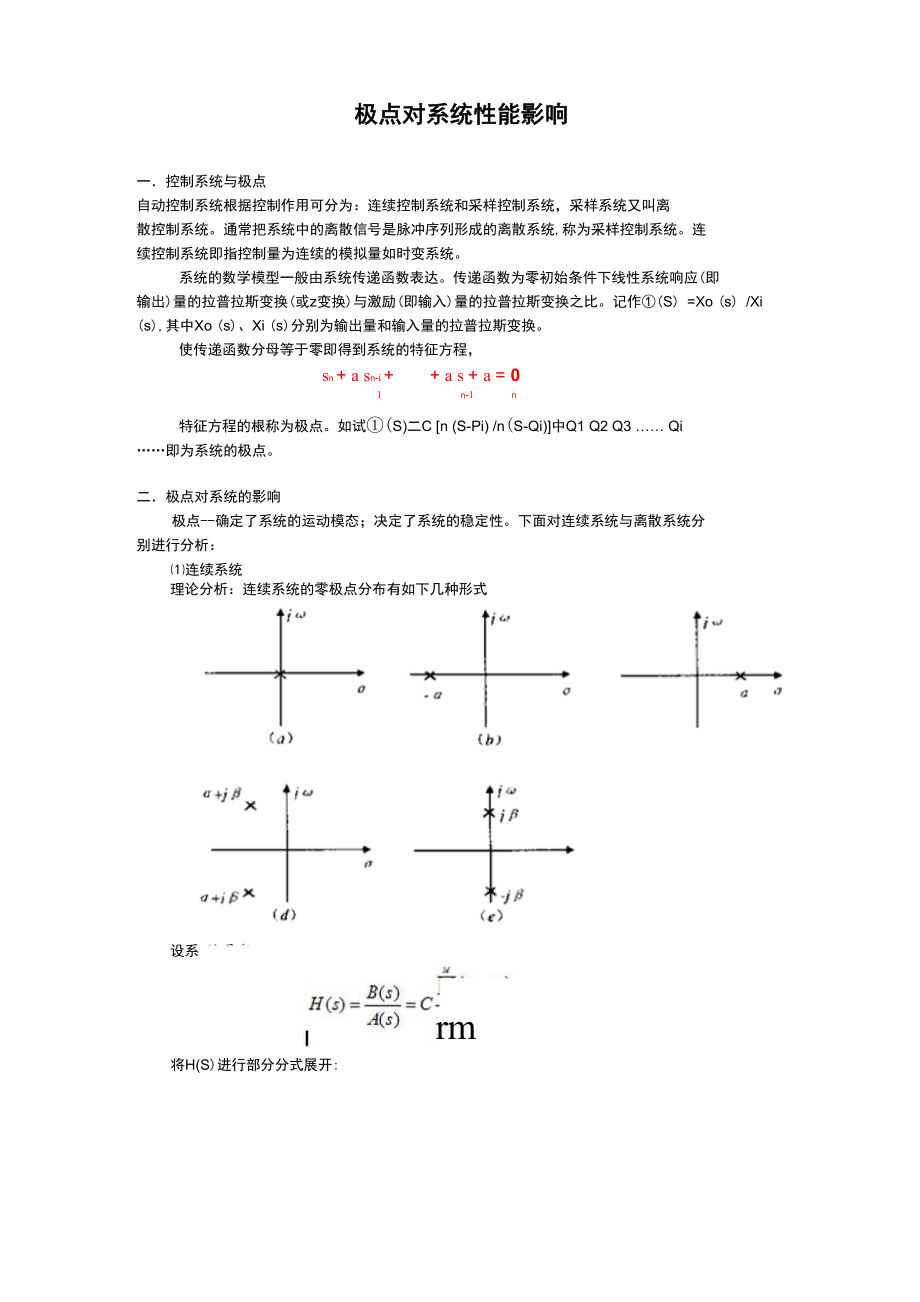
2、n特征方程的根称为极点。如试(S)二C n (S-Pi) /n(S-Qi)中Q1 Q2 Q3 Qi 即为系统的极点。二极点对系统的影响极点-确定了系统的运动模态;决定了系统的稳定性。下面对连续系统与离散系统分 别进行分析:连续系统理论分析:连续系统的零极点分布有如下几种形式rm设系统函数为:将H(S)进行部分分式展开:系统冲激响应H(S)的时域特性h(t)随时间衰减的信号分量完全由系统函数H(S)的极点 位置决定。每一个极点将决定h(t)的一项时间函数。稳定性:由上述得知 Y(S)二 C n(S-Pi) /(S-Qi)可分解为 Y(S)二C1/(S-t 1)+ C2/(S- t2)+ C3/(
3、S- t 3)+ Ci/(S-T i)+ 则时间响应为y (t) = C est + C esj + C esnt12n(1)只有一个实根:s =a(2)有一对复根:s =aja 0时,y (t) T 0y (t) = C e(a+j)t + C e(aj)t12y (t) = Cet a = 0时,y(t)=恒量a 0时,y(t) t gJ=C eat cos(t + 申)=v1a = 0时,等幅振荡t fg1a 0时,发散tTg由于特征方程的根不止一个,这时,应把系统的运动看成是多个运动分量的合成。只要有一 个运动分量是发散的,则系统是不稳定的。因此,特征方程所有根的实部都必须是负数,亦
4、即所有的根都在复平面的左半平面。通过复变函数幅角定理将S由G平面映射到GH平面。如果封闭曲线F内有Z个F(s)的零点,有P个F(s)的极点,则s沿F顺时针转一圈时, 在F(s)平面上,F(s)曲线绕原点顺时针转的圈数R为z和p之差,即R = z p。若R为负,表示F(s)曲线绕原点逆时针转过的圈数。F(s)的分母是GO(s)的分母,其极点是GO(s)的极点;其分子是0 (s)的分母,即0 (s)的特 征多项式,其零点是0 (s)的极点。取D形曲线(D围线)如图所示,是整个右半复平面。且设D曲线不经过F(s)的任一极点或零点。s沿D曲线顺时针变化一周,F(s)顺时针包围原点的周数为:n=z-p=
5、F(s)在右半复平面的零点数(闭环传函在右半复平面极点数)-F(s)在右半复平面的极点数(开环传函在右半复平面极点数) 所以闭环系统稳定的充分必要条件是:n=- p =-开环传函在右半复平面的极点数因此:反馈控制系统在s右半平面的闭环极点个数Z二P-2N,式中,P为s右半平面开环极点数, N为开环Nyquist曲线逆时针包围(T ,jO)点的圈数,且有N二N+N-其中N+为:正穿越与半次正穿越次数的和。其中N-为:负穿越与半次负穿越次数的和。正穿越:随着的增大,开环Nyquist曲线逆时针穿越实轴区间(-8 , -1)。半次正穿越:逆时针方向离开(或中止于)实轴区间(- , -1)。负穿越:随
6、着的增大,开环Nyquist曲线顺时针穿越实轴区间(-8 , -1)。半次负穿越:顺时针方向离开或中止于实轴区间(- , -1)。若开环传递函数有积分环节,开环 Nyquist曲线在ro=O +时,幅值无穷大,而相角 为。判断稳定性要求3二0开始逆时针补半径为无穷大,角度为的虚线圆弧。在计算正、负穿越次数时,应将补上的虚线圆弧作为Nyquist曲线的一部分。总结:仁如系统函数H(s)的全部极点落于S域左半平面,则系统稳定。2. 如系统函数H(s)有极点落于S右半平面,或在虚轴上具有二阶以上的极点,则该系统不 稳定。3. 若系统函数H(s)没有极点落在右半平面,但在虚轴上有一阶极点,则系统临界稳
7、定。4. 系统函数的分子多项式的阶次,不应高于分母多项式的阶次。离散系统离散系统稳定性原理与连续系统一样,由于离散系统本身特征稍有改,离散信号是脉冲序列即时间上离散,离散信号是数字序列即幅值上整量化。r(t)R(z)rIG( z)r *(t)c(t)c*(t)!.G(s)/C(z)因此引入 Z 变换取代拉斯变换只适用与连续函数,离散时间序列 x(n) 的 Z 变换定义 为X(z) =x(n)z-n ,常用序列的Z变换中z = e,a为实变数,3为实变量,j =,所以z 是一个幅度为e6,相位为3的复变量。x(n)和X(z)构成一个Z变换时。理想的单位脉冲序列:8 (t)仝 8 (t - kT)
8、Tk采样器可以看成是一个调制器,输入量作为调制信号,而单位脉冲串可以作为载波信 号,调制过程可以表示为:x*(t) = x(t)8 (t) = x(t)无8 (t - kT)Tk=-g则:x* (t) = x(t )艺8 (t - kT)k =0=x(0)8 (t) + x(T )8 (t - T) + x(2T )8 (t - 2T) + + x(kT )8 (t - kT) +=区 x(kT )8 (t - kT)Z变换为:k=0x* (t)二 x(t)艺 8 (t - KT)二艺 x(kT)8 (t - KT)k=0k=0X *( s) = L x*(t) = S x(kT )e - k
9、Tsk=0则:定义: z = esTX (z) = X *( s)= X *(+ln z) = S x(kT) z -ksln zTTk=0Zx(t)=Zx*(t)= X(z)=S x(kT)z-k由以上定义得知Z变换,则如何从S平面映射到oZ平面:=x(0) z0 + x(T) z-i + x(2T) z-2 +.z = eTss =c + joz = e 9+jo)t = era ejoTZ = eTaZz =o T当a 0,则对应在s左半平面,系统稳定映射到Z平面上 z 0,则对应在s右半平面,系统不稳定,映射到Z平面上|z| 1对应在Z平面 的单位圆外,脉冲系统不稳定;当0=0,则对应在s平面的虚轴上,系统临界稳定,映射到Z平面上z = 1对应在Z 平面的单位圆上,脉冲系统临界稳定。将 Z 进行映射变换,离散系统稳定判断依旧能够使用劳斯判据判断。总结:稳定系统的系统函数的收敛域,应该包含单位圆(包含在单位圆内)。即稳定系统的系 统函数,其极点不应分布在单位圆上!1. 若H(Z)的全部极点落在单位圆内,则系统稳定。2. 若H(Z)有极点落在单位圆外,或在单位圆上具有二阶以上的极点,则系统部稳定。3. 若H(Z)在单位圆上有一阶极点,但其他极点均在单位圆内,则系统临界稳定。
- 温馨提示:
1: 本站所有资源如无特殊说明,都需要本地电脑安装OFFICE2007和PDF阅读器。图纸软件为CAD,CAXA,PROE,UG,SolidWorks等.压缩文件请下载最新的WinRAR软件解压。
2: 本站的文档不包含任何第三方提供的附件图纸等,如果需要附件,请联系上传者。文件的所有权益归上传用户所有。
3.本站RAR压缩包中若带图纸,网页内容里面会有图纸预览,若没有图纸预览就没有图纸。
4. 未经权益所有人同意不得将文件中的内容挪作商业或盈利用途。
5. 装配图网仅提供信息存储空间,仅对用户上传内容的表现方式做保护处理,对用户上传分享的文档内容本身不做任何修改或编辑,并不能对任何下载内容负责。
6. 下载文件中如有侵权或不适当内容,请与我们联系,我们立即纠正。
7. 本站不保证下载资源的准确性、安全性和完整性, 同时也不承担用户因使用这些下载资源对自己和他人造成任何形式的伤害或损失。
