《北理工自模拟题动控制原理》由会员分享,可在线阅读,更多相关《北理工自模拟题动控制原理(5页珍藏版)》请在装配图网上搜索。
1、一、选择填空1.采样系统的输出y(kT的z -变换为Y(z)=z 3 + 2 z 2 + 1z G - 1)G - 0.5),则前四个采样时刻的输出为( )北京理工大学珠海学院自动控制试题(三)每小题 10分,共20 分)(a) y(0)= 1,y(T)= 4.75,y(2T)= 3.5,y(3T)= 6.375(b) y(0)= 0,y(T)= 3.5,y(2T)= 4.75,y(3T)= 63.75(c) y(0)= 1, y(T)= 3.5, y(2T)= 4.75, y(3T)= 63.75(d) y(0)= 1, y(T)= 3.5, y(2T)= 4.75, y(3T)= 6.37
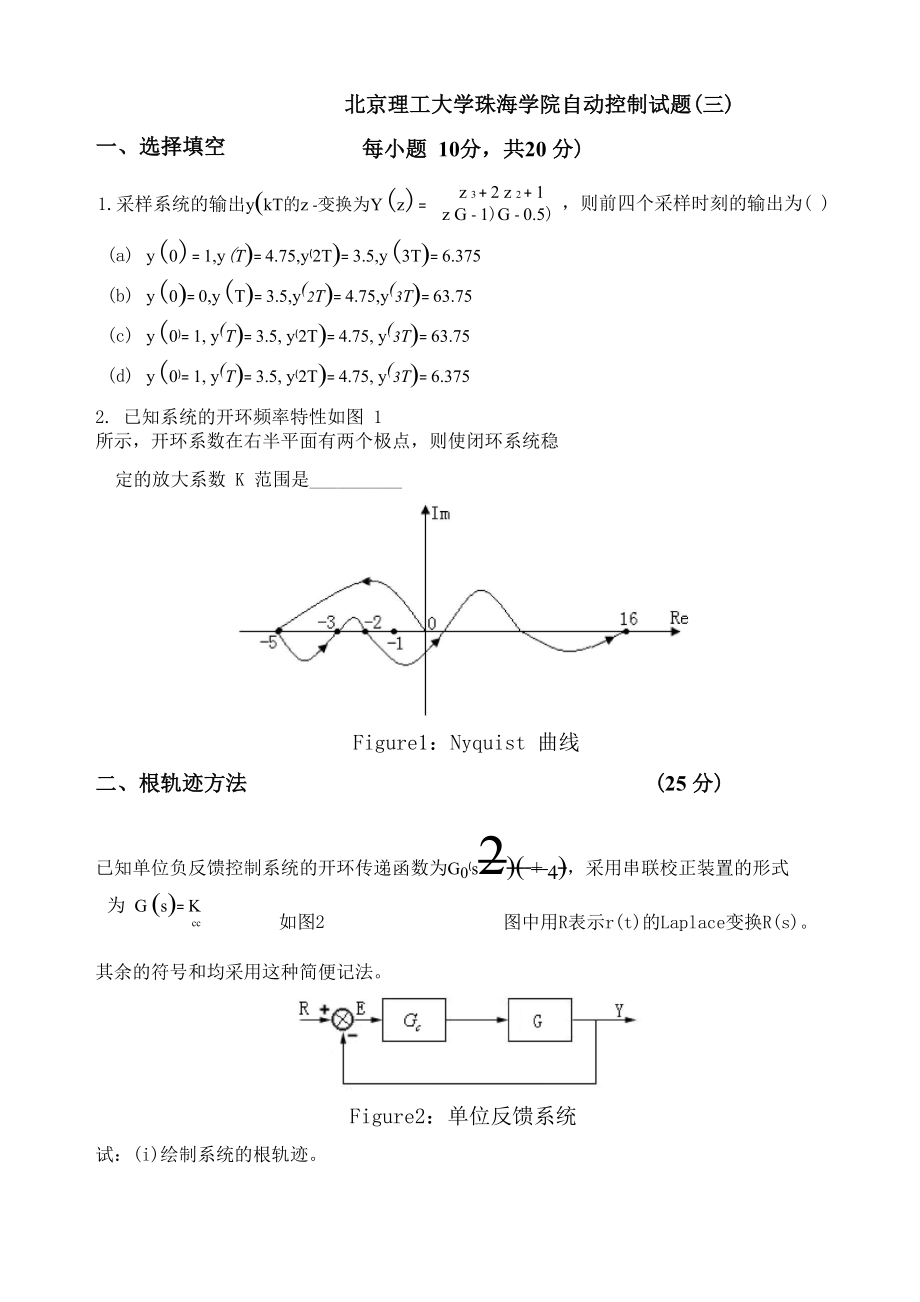
2、52. 已知系统的开环频率特性如图 1 所示,开环系数在右半平面有两个极点,则使闭环系统稳定的放大系数 K 范围是Figure1:Nyquist 曲线二、根轨迹方法(25 分)已知单位负反馈控制系统的开环传递函数为G0(s2)( + 4),采用串联校正装置的形式为 G (s)= Kcc如图2 所示。为简便起见,图中用R表示r(t)的Laplace变换R(s)。其余的符号和均采用这种简便记法。Figure2:单位反馈系统试:(i)绘制系统的根轨迹。(ii)当系统的阻尼比匚为最佳阻尼比时,求系统在单位阶跃函数作用下,系统的动态性能指标超调量b %和调整时间t。 s30 分)考虑系统x = Ax +
3、 BuVy = Cx + Du1)先设(ii)-aq-a1证明:若f (s )= s3 + a s2 + as + a21 Q1中的线性变换x = Tx,将状态空间表达式(1)=(s-九(s 九)其中九 八,则可通过状态空间x = A x + B uVy = Cx + Du其中九1 q q1九1qqq九2T 可取为1九1九21q12九11九2九222变为2)三、状态空间方法求 eJt和eAt。(iii)A 同(ii).B = b Q it , C = 1 1q确定不可控或不可观测判断系统的可控性和可观测性。若系统不可控或不可观测, 的模态;(iv) A,B,C同(iii) , D=0,能否通过
4、状态反馈使闭环极点配置在-3、-4、-5?请说明理由。若能的话,请求出状态反馈阵 K。四、频率法25 分)由实验测得某最小相位系统的幅频特性对数坐标图如图 3所示,试求(i) 系统的开环传递函数G (s )并画出系统的相频特性曲线;(ii) 计算系统的相角裕度丫和幅值裕度K ;g(iii)闭环系统对单位阶跃输入和单位斜坡输入的稳态误差分别是多少?五、采样控制系统(20 分)离散控制系统如图4所示,其中T0为采样周期,K0。Figure4:离散控制系统(i)求系统的开环脉冲传递函数G(z)和闭环脉冲传递函数(z);(ii) 当K=1时,求使系统稳定的T值范围;(iii) K=1, T=ls时,求
5、单位阶跃输入下的输出响应y(kT)和稳态误差eQ)六、描述函数分析方法(20 分)非线性控制系统如图 5所示,图中非线性环节的描述函数为Figure5 :非线性控制系统(i) 设系统处于稳定自振状态时,线性环节G(s)=|l)的相角迟后量为135。,求此时的 K 值,并确定输出端自振频率、幅值。(ii) 定性分析当K值增加时,系统输出端自振频率、幅值的变化趋势。七、Lyapunov稳定性(10分)考虑如下非线性系统IX 二一 x + x - x 3 1 1 2 1I x = x 一 x 一 x 52122(i) 求系统的所有平衡点;(ii) 判断每一个平衡点在Lyapunov意义下的稳定性,并阐明理由。
 北理工自模拟题动控制原理
北理工自模拟题动控制原理