 焊接滚轮架上工件轴向窜动防窜机理研究
焊接滚轮架上工件轴向窜动防窜机理研究

《焊接滚轮架上工件轴向窜动防窜机理研究》由会员分享,可在线阅读,更多相关《焊接滚轮架上工件轴向窜动防窜机理研究(3页珍藏版)》请在装配图网上搜索。
1、2 0 0 7年 8月 第 3 5卷 第 8期 机床与液压 MACHI NE T00L&HYDRAUL I CS Au g 2 0 0 7 Vo 1 3 5 No 8 焊接滚轮架上工件轴向窜动防窜机理研究 罗生梅,陈利(兰州X_-z-大学机电工程学院,甘肃兰州 7 3 0 0 5 0)摘要:探讨了简体在焊接中出现轴向窜动的问题和产生轴向窜动的主要原因,分析了对主动轮转速的控制和简体轴窜 位移的调节机理,同时提出了具有位移、速度负反馈的非线性控制方案,并通过相平面法对系统稳定性进行了分析。关键词:防窜滚轮架;轴向窜动;非线性控制 中圈分类号:T M1 5 1 文献标识码:A 文章 编号:1 0
2、0 1 3 8 8 1(2 0 0 7)8 0 7 4 2 S t u d y o n t he Ant i-flo a t i ng M e c ha n i s m f o r the Ax i a l Dr i f t i ng o f the Cy l i nd e r o n a W e l d i n g Ro l l e r Be d LUO S h e n g me i,CHEN Li (C o l l e g e o f T e c h n o l o g y a n d E n g i n e e r i n g,L a n z h o u U n i v o f T e
3、c h ,L a n z h o u 7 3 0 0 5 0,C h i n a)Abs t r ac t:The ma i n i s s u e s o f a x i a l d rifti ng a nd t he ma i n f a c t o r s wh i c h a f f e c t t h e a x i a l d rifti n g i n we l di n g a c y l i n de r we r e s t u di e d,t h e c o n t r o l o f t h e r o t a t io n a l s p e e d o f d
4、ri v i n g r o l l e r and t h e a d j u s t m e c h a n i s m f o r t h e a x i a l d ri ft i n g o f t h e c y l i n d e r w e r e ana l y z e d,a n o n l i n e a r c o n t r o l me t h o d wi t h di s pl a c e me n t an d v e l o c i t y n e g a t i v e f e e d b a c k wa s pr e s e n t e d Ke y
5、wo r d s:A n t i fl o a t i n g mi l e r b e d;Ax i a l d ri ft i n g;N o n l i n e a r c o n t r o l 我 国在 1 9 9 0年颁 布 的焊 接 滚 轮 架 的行 业 标 准(Z B J T 3 3 0 0 3 1 9 9 0)中规定:主动滚轮的圆周速度应 在 6 6 0 m h范围内无级可调,速度 波动量按不同的焊 接工艺要求,要低于 5 和 1 0,滚轮转速应稳 定、均匀,不允许有爬行现象。按 G B 1 5 0规定制造的 筒体类工件在防轴 向窜动滚轮架上进行 焊接 时,在整 个焊接过程中
6、允许工件的轴向窜动量为 3 m m。虽然我 国近年来也有个别工厂生产过防窜 动滚轮 架,但这些工厂都 把滚轮架 当作工装 而不 当作 产品,所以它的制造很粗糙,结构、尺寸、规格都存在许多 问题,都不标准。而且国外于 2 0世纪 8 0 年代中期推 出的防止简体轴向窜动焊接滚轮架,能将筒体 的窜动 量控制在 2 ra m 以内。所 以我 国近年生 产 的防窜 动 滚轮架在实用性和可靠性方面,与国外产品相比还存 在着差距。1 焊接过程中出现的一些问题(1)当筒体 的形状 是规 则的圆柱体,但 滚轮架 的 主 动轮和从 动轮 的安装不 在 同 一水平线上 时,滚轮对 简体 也会产生轴向外力的作用使
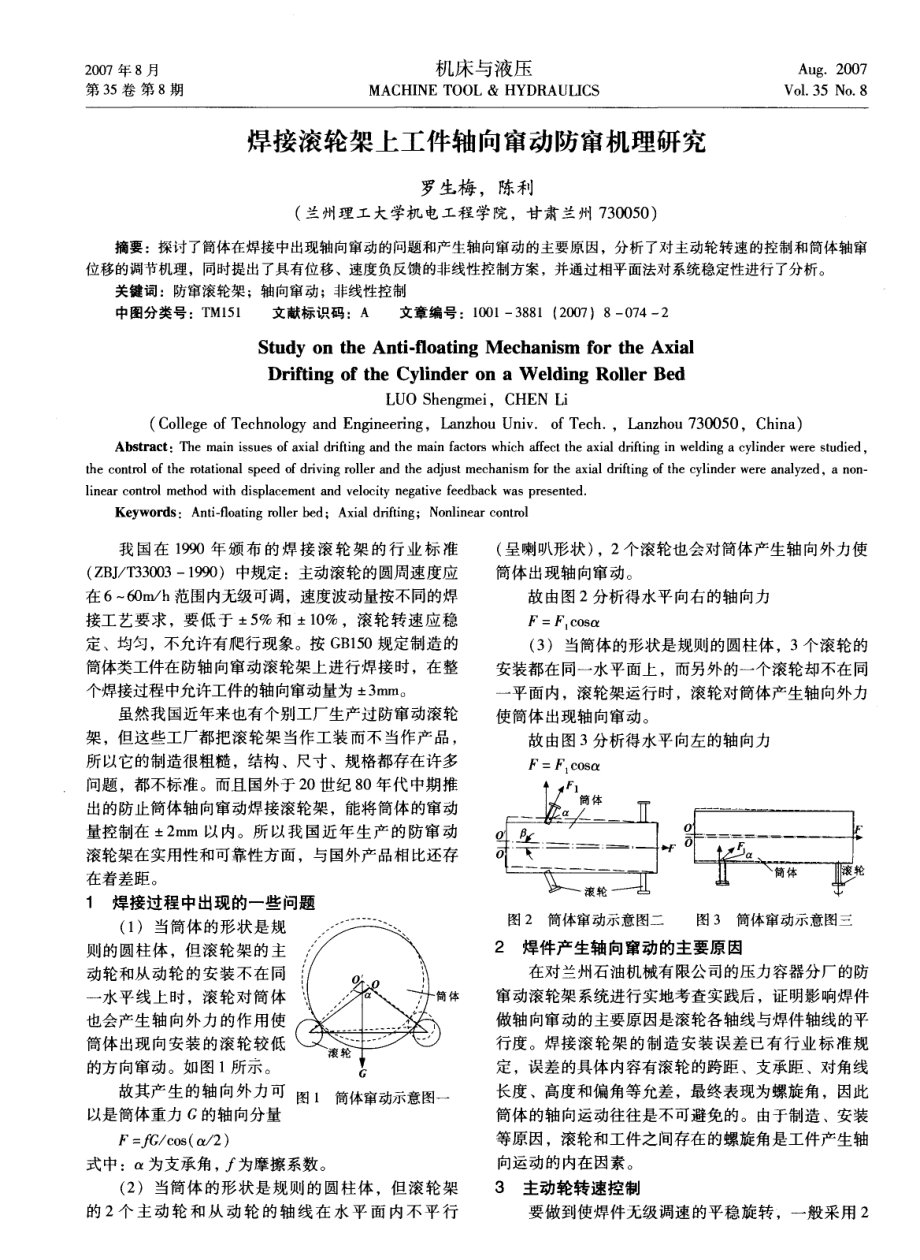
7、筒体出现 向安装 的滚轮 较低 的方 向窜动。如图 1 所示。故其产生的轴向外力可 以是简体重力 G的轴向分量 F=f C c o s(a 2)体 G 图 1 简体窜动示意 图一 式中:为支承角,-厂 为摩擦系数。(2)当简体 的形状 是规 则的 圆柱体,但滚 轮架 的 2 个 主动 轮 和 从 动 轮 的 轴 线 在 水 平 面 内不 平 行(呈喇叭形状),2 个滚轮也会对简体产生轴向外力使 筒体 出现轴 向窜 动。故由图 2 分析得水平向右的轴向力 F=Fl C O S O (3)当简体 的形状是规则的圆柱体,3个滚轮的 安装都在同一水平面上,而另外的一个滚轮却不在同 一平 面内,滚轮架运
8、行 时,滚轮对简体产生轴 向外力 使筒体出现轴向窜动。故 由图 3 分 析得水平 向左的轴向力 F=F1 C O S O 一 D i o I、图2 简体窜动示意图二 图3 简体窜动示意图三 2 焊件产生轴向窜动的主要原因 在对 兰州石油机械有限公 司的压力容器分厂的防 窜 动滚轮架 系统进行实地考查实践后,证明影响焊 件 做轴 向窜动 的主要原因是滚轮各轴线 与焊件轴线的平 行度。焊接滚轮架的制造安装误差已有行业标准规 定,误差的具体内容有滚轮的跨距、支承距、对角线 长度、高度和偏角等允差,最终表现为螺旋角,因此 简体 的轴 向运动往往是 不可避免 的。由于制造、安装 等原因,滚轮和工件之间存
9、在的螺旋角是工件产生轴 向运 动的内在因素。3主动轮转速控制 要做到使焊件无级调速的平稳旋转,一般采用 2 维普资讯 http:/ 第 8期 罗生梅 等:焊接滚轮架上工件轴向窜动防窜机理研究 7 5 种驱动方式:直流 调速 和交 流变频 调 速。由于 直流 调速存在着故障率高且成本也高的缺陷,因此选择交 流变频调 速。随着 电子技术 的发展,交流变频调速 已 完全能够满足各种吨位焊接滚轮架的要求。为使焊接滚轮架的滚轮间距调节方便可靠,组合 便利,采用主动轮单独驱动的设计方案,即每个主动 轮单独利用一台电动机和减速机构驱动。要尽量选用 特性一致且经过实测的电动机和减速机构,并使用一 套驱动源,各
10、个 主动轮 电动机采用并联的方式并要解 决好各主动轮的同步问题。4 轴窜位移调节机理 滚轮的轴线与简 体 的 中 心 线 不 平 行 形 成螺 旋 角是 轴 窜 位 移 产生的内在 因素。通过 调节滚轮 与简体 的相 对 位 置 可 以有 效 地 控 制螺旋角。轴窜位移调 节 机 理 如 图 4所 示,c、D分 别 为两 从动 轮 的轴 心,从 动 轮 c放 置在一杠杆上,杠杆的 、t o 图4 轴窜位移调节机理 支点为 B,杠杆的另一端由举升电机驱动螺旋千斤顶 举升或下降。如当筒体发生轴向窜动时,根据轴窜位 移及轴窜速度 的大 小 和方 向控 制举 升 电机将 杠 杆 A 端举升 A h 距
11、离,从动滚轮的轴心由点 c移至点 c ,简体的中心由点 0移至点 0 ,简体的轴线发生变化,与两侧滚轮形成附加螺旋角,产生相反方向的轴窜速 度,从而减小 轴窜位移。5 控制系统分析 控制系统的任务是减:i x 3-件的轴窜位移 Y,在规 定时间内把轴窜位移控制在焊接生产所允许 的范 围内。首先应选择合适的轴 向位移传感器测量 出 Y的大小 和 方向,有了Y的大小和方向(反馈输入量),再依据工 件的轴向窜动规律来确定合适的控制规律。控制系统 主要是控制偏转电机的正反转、转动时间和暂停时间 的长 短。本 文 遵 循 下面一 种 非 线性 控 制规 律,并 且 引进 位移、速度负 反馈。图5 控制系
12、统原理方块图 控制 系统原理如图 5所示。非线性控制规律为:当 0时:【一MN e,一C t 式中:为偏转电机转速的绝对值;系数 取决于 主动滚轮转动方向,正转时 M=1,反转时M=1;e,=R一(Y+);口、b、是关键的 3个系统参 数,由系统仿真优化确定,线性系统的动态微分方程 为=当 R=0时,e =一(Y+k),可将 相平面分为 3个 区域,如图 6所示。I 区内,线性 系统方程为=一K M N,等倾斜 线 方程为=一 K M N a;区内,线性 系统方程为=0,等倾线方程为。=0;区内,线性系统方程为=K MN,等倾线方程 为=K M N a。在 I、区 域 内,相 轨 迹 为 抛
13、物 线;在 区域 内,相 轨迹 为 与 水 平轴平行的直线。由上 述 分 析 可 见,引入 位 移、速度 负 反馈,改变了开关 转换 线位 置,使相轨迹 提前转换,并 趋 向一 个稳 定 的极 限环,J J,+Y=+-6 I t b J +y=-a 从 而 改 变 了系 统 的 动态 图6 控制系统相图 性能。极限环的大小取决 于。、b 及 值,系统 的控 制精度近似为。该控制方案虽使系统保持一定的 自持振荡,但可以通过外加“窗 口”电路使振幅控 制在较小的范围内,这样仍能获得 良好 的控制效果。6 结束语(1)在制造和使用焊接滚轮架时,首先应尽量 做到主从动轮都位于同一中心线上,各滚轮的轴线
14、都 在一个水平 面内互相平行,滚轮 间距应相等。(2)滚轮架上简体轴向运动的根本原因是 由于 螺旋角的存在,螺旋角是滚轮架制造安装过程中带来 的随机误差。(3)闭环 自动控制 系统 遵循 具有 位移、速 度负 反馈 的非线性控制规律,并通过相平面法对系统稳定 性进行了分析,分析结果与模型实测结果一致。系统 控制精度达到 0 1 5 m m,完全可用于焊接滚轮架上 工件的轴向窜动控制。参考文献【1】李佳慧 防轴向位移焊接滚轮架控制系统的设计与研 究 J 长春大学学报,1 9 9 9 【2】沈风刚 工件在焊接滚轮架上轴窜机制及防止措施的 对比研究 D甘肃工业大学,1 9 9 4 【3】王永初 自动
15、调节系统工程设计 M北京:机械(下转第7 8页)维普资讯 http:/ 7 8 机床与液压 第3 5卷 弦长应根据加工精度要求来确定,等弦长后,最大误差6 在最大曲率及最小曲率半径 R 处。L=2 R 2一(R )一 2 历(2)确定 R 函数 X=z)任一点的曲率半径为 R:型 式中:X 为函数 X=z)的一阶导数,为函数 X=z)的二阶导数。当:o,即 3 X”z X,一(1+X,:)”:0时,为 函数 X=,(z)的三 阶 导数)得 R,所 以根 据 X=z)求得、的值代入上式,即得 值。将 值代入曲率半径 R公式,即得到 R 一。(3)确定 弦长 的圆方程 以曲线起点 A为 圆心,弦长
16、 为半径 的 圆方 程 为:(。)+(z z。)=8 R 6 允 (4)解 圆与 曲线的联立方 程 r X=z)I(。)+(z z。)=8 R 6 求得 点坐标值,顺次以、c、D点为 圆心,计算出c、D、E等各点的坐标值。3 2 程序编制 依据 I S O 一 1 0 5 6 7 5国际标准规定,圆弧插补指令 为 G 0 2 G 0 3。其编程格式较简便,但圆弧加工常常从 粗加工到精加工需多次走刀、对刀,会使加工程序冗 长。为了简化编程应尽量使用数控系统固有循环指令 或子程序。例如,图2所示凸模的右端圆弧面加工可建立子 程序,这样可大大减少计算量,简化编程。主程序 CK1 1 N 0 01 0
17、 G9 0 G9 5;N 0 0 2 0$5 0 0 M0 3;N0 0 3 0 G1 5 8 X0 Z1 0 0;N0 0 4 0 T1 D1 M0 8;N0 0 5 0 G0 0 X6 8 Z 4 0;N0 0 6 0 G O1 Z 3 5;N0 0 7 0 G O1 X0 F 0 5:N0 0 8 0 G 0 0 X1 0 0 Z1 0 0;N0 09 0 I 2 D2$6 0 0;N01 0 0 G 0 0 X6 8 Z 4 0;N0 1 1 0 GO1 Z3 8;N0 1 2 0 KL 6 0 PI O;N 01 3 0 M0 3 N01 4 0 G01 N01 5 0 KI 0 N
18、01 6 0 G0 0 NO1 7 0 M0 5;N01 8 0 M0 2:子程序 KI 60 N0 01 0 G91:N0 0 2 0 G01 N0 0 3 0 G0 1 N0 0 4 0 G0 3 N0 0 5 0 G0 2 N0 0 6 0 G 01 N0 0 7 0 G0 0 N0 0 8 0 X6 8$9 0 0;Z2 8 2 6;P1;X1 0 0 Z1 0 0;Z一1;X 一2 3 6 8 8 Z2 0 9:X 一2 2 3 7 6 Z 一5 5 5 8 CR=1 0:X 一7 2 2 8 Z一2 2 9 CR=4:X 一1 4 7 0 8:Z】0 N0 0 9 0 Z l 0
19、N0 1 0 0 G9 0 N0 1 1 0 M1 7 4 结束语 本 文对曲面数控 车削 中刀具选择、刀具运动轨迹 确定、加工程序编制等关键问题进行了分析,并提供 系列的解决方法和思路,为数控车削操作人员提供了 参考,有利于保证曲面的加工质量,提高数控车床的 生产率。参考文献【1】王永章,等 机床的数字控制技术 M黑龙江:哈尔滨工业大学出版社,1 9 9 5,【2】S I E M E N S 8 0 2 D数控系统数控车床编程与操作手册 【3】关 颖数 控车 床 M 北 京:化 学工业 出版社,2 0 0 5 作者 简 介:梅 伶,女,高 级 讲 师。电话:0 2 0 3 6 9 0 3 1
20、 3 1(O),1 3 7 1 0 6 2 4 4 6 2,E ma i l:M L 9 8 0 9 8 1 6 3c o m o 收稿 日期:2 0 0 7 0 31 4 (上接第 7 5页)工业出版社,1 9 8 3 【4】马杭,王政,朱亮,等 焊接滚轮架上简体的轴向运 动 J,甘肃工业大学学报,1 9 9 3,1 9(4):1 21 6 作者简介:罗生梅,女,1 9 6 4年出生,兰州 理工大学 机电工程学院副教授,硕士生导师,研究方向为数控技术 及 自动化。发表论文 4 0多篇,获专利 3项,出版专著 1 部。电话;1 3 8 9 3 443 5 1 1,1 3 0 8 8 7 1 1 7 0 8 Em a i l:l m mi a o m a i l 2 1 u t,c n。陈利,男,1 9 8 0年出生,兰州理工大学机 电工程学院研究生。收稿 日期:2 0 0 6 0 9 2 1 维普资讯 http:/
- 温馨提示:
1: 本站所有资源如无特殊说明,都需要本地电脑安装OFFICE2007和PDF阅读器。图纸软件为CAD,CAXA,PROE,UG,SolidWorks等.压缩文件请下载最新的WinRAR软件解压。
2: 本站的文档不包含任何第三方提供的附件图纸等,如果需要附件,请联系上传者。文件的所有权益归上传用户所有。
3.本站RAR压缩包中若带图纸,网页内容里面会有图纸预览,若没有图纸预览就没有图纸。
4. 未经权益所有人同意不得将文件中的内容挪作商业或盈利用途。
5. 装配图网仅提供信息存储空间,仅对用户上传内容的表现方式做保护处理,对用户上传分享的文档内容本身不做任何修改或编辑,并不能对任何下载内容负责。
6. 下载文件中如有侵权或不适当内容,请与我们联系,我们立即纠正。
7. 本站不保证下载资源的准确性、安全性和完整性, 同时也不承担用户因使用这些下载资源对自己和他人造成任何形式的伤害或损失。
