 三菱机器人离线软件与示教器.docx
三菱机器人离线软件与示教器.docx

《三菱机器人离线软件与示教器.docx》由会员分享,可在线阅读,更多相关《三菱机器人离线软件与示教器.docx(32页珍藏版)》请在装配图网上搜索。
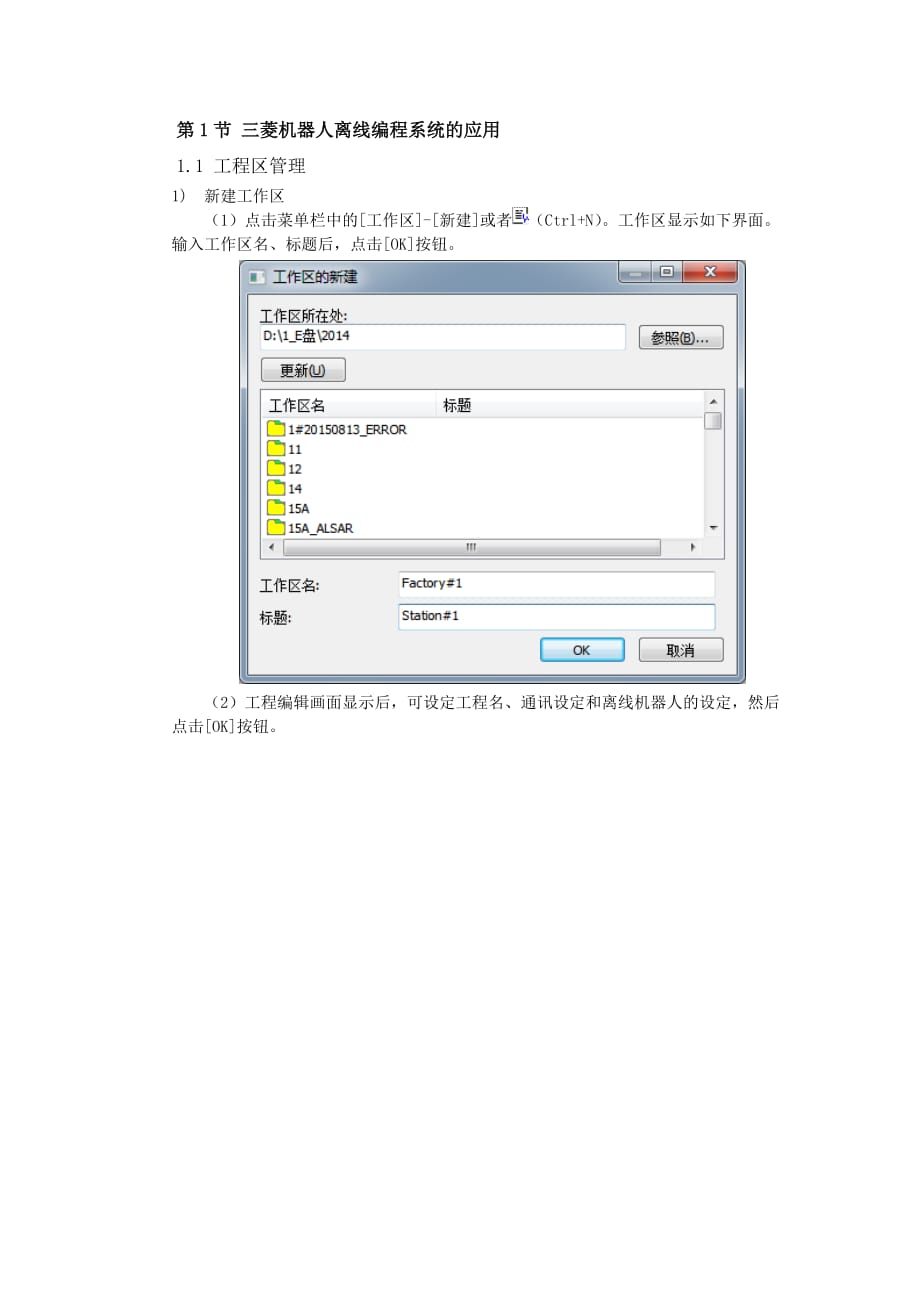
1、第1节 三菱机器人离线编程系统的应用1.1 工程区管理1) 新建工作区(1)点击菜单栏中的工作区-新建或者(Ctrl+N)。工作区显示如下界面。输入工作区名、标题后,点击OK按钮。(2)工程编辑画面显示后,可设定工程名、通讯设定和离线机器人的设定,然后点击OK按钮。(3)工程创建完毕。工作区中会显示工程树,走位初始值,制成的RC1工程。2) 打开工作区打开已经完成的工作区时,选择菜单栏中的工作区-打开,或者点击工作栏中的(Ctrl+O),选择要打开的工作区后,点击OK按钮。 3) 关闭工作区与删除工作区关闭当前编辑中的工作区时,请点击菜单栏中的工作区-关闭。删除工作区的情况下,如果不关闭作为对
2、象的工作区,就不能删除。4) 工作区名/工作区标题的变更在以打开工作区的基础上,鼠标右击工作区名工作区的编辑,工作区编辑画面显示后,输入新的工作区名和标题后,点击OK。如下图。5) 工程的编辑6) 工程树(4)工具部分(2)备份部分(2)在线部分(1)离线部分 (1) 离线部分离线部分显示电脑中的信息,即当前设定的机器人的机型和机器人的程序。(2) 在线部分在和控制器连接后,切换成在线状态时,或者模拟启动时显示,显示连接中的机器人型号和控制器等相关信息。(3) 备份显示从控制器备份过来的信息。(4) Tool功能显示其它功能。7) 离线/在线/模拟在机器人离线编程软件中,工程的状态可分为离线、
3、在线和模拟三种。各个状态的含义和工程树的显示内容不尽相同。状态说明工程树的显示离线状态以电脑中保存的文件作为对象。工程树的工程名左面显示的图标为绿色,工程树中,显示离线和备份。 在线状态连接机器人的控制器,进行控制器中信息的确认和变更。在线时,工程树的工程名显示图表为蓝色,工程树中显示离线、在线和备份。 模拟状态以电脑上启动的虚拟控制器为对象,进行虚拟控制器中的信息确认和变更。离线/在线/模拟的切换,可以通过菜单栏的在线,或者工具栏来执行。 工具栏中,可以做以下的切换。切换成离线模式,切换成在线模式,切换成模拟在线模式。1.2 机器人软件与机器人的连接三菱机器人软件与控制器连接方式可分为USB
4、连接、TCP/IP、RS-232和GOT连接,不同类型的控制器和机器人软件连接的方式不同。在工程编辑界面,选择要连接控制器的类型和通讯设定方法,点击详细设定,进行详细设定。通常,根据需要连接的控制器,会机型离线专用机器人的设定和用于显示的行走台的设定。1) USB的通讯设定项目说明初始值Ver 1.1以前Ver 1.2以后发送超时发送时的超时时间1000msc - 3000msec3000msec5000msec接收超时接收时的超时时间5000msec - 12000msec3000msec3000msec重试次数通讯重试次数 0 - 10次3次3次2) TCP/IP的通讯设定项目说明初始值V
5、er 1.1以前Ver 1.2以后IP地址设置需要连接的机器人控制器的IP地址使用端口通讯中使用的端口号码10001发送超时发送时的超时时间 1000msc - 3000msec1000msec5000msec接收超时接收时的超时时间5000msec - 12000msec2000msec3000msec重试次数通讯重试次数 0 - 10次3次0次3) RS-232的通讯设定项目说明初始值使用端口COM1 - COM10COM1通信速度从4800,9600,19200中选择9600文字大小7或88奇偶性NON(无)、ODD(奇数)、EVEN(偶数)EVEN停止位1、1.5、22发送超时发送超时
6、时间:1000 - 30000msec5000msec接收超时接收超时时间:1000 - 120000msec30000msec重试次数重试次数:0 - 10次3次使用协议Non-Procedural(无步骤)、Procedural(有步骤)Procedural(有步骤)4) GOT通讯设定是在CR750-D/CRnD-700 系列 机器人控制器和GOT1000 系列被在Ethernet 连接的时候GOT 通信使用GOT 的RS-232 和USB,连接通信方法。项目说明初始值COM 端口COM1COM10 的选择可能。COM1波特率9.6Kbps、19.2Kbps、38.4Kbps、57.6K
7、bps、115.2Kbps19200网络No.1239 的选择可能。请同GOT 的网络No.码相适应。1局号(个人电脑一侧I/F 设定)164 的选择可能。请同GOT 的局号的设定相适应。请设定不同的值为控制器侧I/F 的局号。64控制器IP 地址请设定被在GOT 连接了的机器人控制器的IP 地址。192.168.0.20局号( 控制器侧I/F 设定)164 的选择可能。请同GOT 的局号的设定相适应。1互相通话时间检19999 的选择可能。设定发报之后的暂停时间。当设定短时间因为暂停错误发生的时候所以请注意。301.3 程序管理可以对机器人程序进行新建、编辑、复制、移动、删除、内容比较、名字
8、的变更、保护设定。1) 新建程序程序名1 选择需要新建的工程离线-程序,然后点击鼠标右键,显示菜单后点击新建。 2 输入机器人程序名后,点击OK按钮,显示程序编辑画面。3 程序新建完成。2) 打开现有程序展开作为工程树的对象的工程的离线程序。 所保存的程序会被显示在工程树中,然后双击需要进行编辑的程序。3) 打开控制器中的程序展开作为工程树的对象的项目的在线程序。 所保存的程序会被显示在工程树中,然后双击需要编辑的程序。画面显示,确认读出项目后,点击OK按钮。4) 程序指令的编辑STEP编号直角型位置变量关节型位置变量指令编辑区使用MELFA-BASIC V 制作程序时,没有类似MELFA-B
9、ASIC IV 和MOVEMASTER 指令的行号,左边显示STEP 位置。该STEP 编号,可以通过键盘的Enter键自动显示。根据相应指令的格式将程序指令编辑到步号后面的程序编辑区。 多旋转数据机器人姿势机械手类型位置数据名获取当前位置位置类型名位置变量名5) 位置变量的编辑位置变量的编辑,在位置编辑画面上进行。上方的列表是直交坐标型变量的列表,下方的列表是关节坐标型的变量列表。修正位置变量的情况下,在列表中选中作为对象的位置变量后,点击变更按钮。选中的位置变量显示。在软件Ver.1.6 版本以后,变量名是可以变更的。但是,PLC 直接的位置变量的变量名、以调试状态打开程序的情况下以及在软
10、件Ver.1.5.1 版本以前使用的情况下是不能变更的。选择直交坐标型/关节坐标型,输入位置数据的各要素值和位置变量名后, 请点击OK按钮。在线状态,或者模拟状态下,在线的程序编辑中,点击当前位置读取按钮,可以读出机器人的当前位置。6) 程序复制左右的列表中,显示所指定的文件夹和机器人控制器中的程序一览。 工程 能够指定工作区内的工程。 机器人 能够指定当前连接着的机器人控制器。 参照按钮 选择工程时,能够指定电脑上的任意文件夹。进行程序文件的复制。可以进行指令和位置变量、只有指令、只有位置变量的复制。在左侧的列表中选择传送源的程序名,并在右侧指定传送目标。对于传送源程序,可以同时选择多个。但
11、是,如果是变更名字复制的情况下,只有选择1 个程序的时候才有效。点击复制按钮,在 复制的设定 对话框中进行设定,然后复制。7) 程序的移动与删除进行程序文件的移动时,在左边列表中选择传送源程序名,并在右侧指定传送目标。传送源程序,可以同时选择多个。点击移动按钮来进行移动。进行程序文件的删除时,从列表中选择要删除的程序名。可以同时选择多个程序。删除左右列表中选择的所有文件。 在左右的列表中选择文件后,请点击删除按钮。 显示删除确认信息。点击是按钮,程序按钮将被删除。注意:如果删除正在编辑中的程序的话会提示报错。 要删除程序时,请务必在编辑完成后进行。8) 名字的变更进行程序文件的名称变更。从列表
12、中选择 1 个要变更名字的程序名。程序可以在左右任意一边的列表中选择。按下名字的变更按钮, 在名字的变更对话框口中设定新的名称后,进行名称的变更。9) 保护对控制器内的程序文件进行保护操作。能够对程序文件的全体,或只对指令、只对位置变量进行保护的设定和保护的解除。对于被保护的文件,不能进行移动、删除、名字的变更操作。这些操作,请在保护解除之后进行。从列表中选择要进行保护操作的程序名。程序能够同时选择多个。左右两边的列表都能选择。点击保护按钮, 在保护设定 对话框中设定后,执行保护操作。注意:能够进行保护操作的程序,仅限于机器人控制器中的程序。10) 比较进行程序文件的内容比较。能够对文件的全体
13、,或只对指令、只对位置变量进行比较。从左右两侧的列表中选择一个要比较的程序名。 点击比较按钮, 在比较设定 对话框中设定后,执行比较。比较结果会显示在比较结果 对话框中。1.4 参数管理可以参照和改写在机器人控制器中所设定的参数信息。参数的设定,有通过指定参数名来设定的方法和按功能来归纳设定的方法两种。1) 抓手参数对执行安装在机器人上的抓手的类型(单螺线型电导管/双螺线型电导管等) 、OPEN*(抓手开)指令和HCLOSE*(抓手关)指令的时候的工件把持/未把持进行设定。参数的设定,需在与机器人控制器连接的状态下使用。从工程树中,双击作为对象的工程的在线参数抓手抓手参数。更改参数的值后,点击
14、写入按钮,能够改写机器人控制器内与抓手相关的参数。2) 专用输入输出信号分配从工程树中,双击作为对象的工程的在线参数专用输入输出信号的分配通用1。更改参数的值后,点击写入按钮,能够改写机器人控制器内的参数。参数名区分名称功能AUTOENA输入自动运行可输入禁止在非运动做自动运行。此信号为在非自动模式的时候,会发生E5010,在取得操作面板的输入和IO的操作时使用。没有一定要使用的必要输出自动运行可输出输出自动运行状态IOENA输入操作权输入信号使外部信号的控制的操作权有效/无效。输出操作权输出信号输出外部信号控制操作权有效状态START输入启动输入执行程序的启动输出运行中输出输出程序为运行中S
15、TOP输入停止输入停止运行中的程序输出中断输出输出程序为中断中SLOTINIT输入程序复位解除式的中断中状态,返回到执行行前,依据程序复位,会变成程序可选择状态输出程序选择可能输出输出可选择程序输出状态ERRRESET输入报名复位输入信号解除报警状态输出输出报警信号输出报警状态SERVON/SERVOFF输入伺服信号输入打开/关闭伺服电机的电源输出伺服信号输出显示伺服电机电源状态3) 数据参数从工程树中,双击作为对象的工程的在线参数专用输入输出信号的分配数据。更改参数的值后,点击写入按钮,能够改写机器人控制器内的参数。 参数名区分名称说明PRGSEL输入程序选择输入信号将以数值输入信号的设定值
16、以程序号码指定。选择对应插槽的程序号码OVRDSEL输入速度比例选择输入将在数值输入信号的设定值视为速度比例IODATA输入数值输入作为二进制读入,如程序号码,速度值等输出数值输出作为二进制输出,如程序号码,速度值等1.5 监视状态可以持续显示当前连接中的机器人控制器中的各种信息。各监视功能大至分为以下3 种。 机器人动作监视 进行机器人的动作相关的项目的监视。 信号监视 进行机器人的输入输出信号相关的监视。 运行监视 进行机器人所执行的运行内容相关的监视。监视概要监视名称说明机器人动作监视SLOT状态可以确认各任务SLOT 的运行状态。程序监视可以确认按各个任务SLOT 设定的程序的执行行、
17、程序中使用的变量的内容、机器人的当前位置等。动作状态可以按各个连接的机器,确认当前位置信息、以及抓手开闭状态。报错可以确认当前发生的报错。并且,可以确认到目前为止所发生过的报错的历史。3D监视可以三维(3D)确认显示机器人及其动作。信号监视通用信号可以确认从外部机器输入到机器人控制器中的信号,和从机器人控制器输出到外部机器的信号的状态。并且,可以进行信号的模拟输入和强制输出。带名字的输入输出信号对机器人控制器中设定的专用输入输出信号的状态,以及通用信号的各位,或者到32 位为止的范围,可以给它们命名后,确认它们的状态。停止信号可以确认机器人控制器中输入的停止信号。寄存器( CC-Link)可以
18、进行CC-Link 功能中输入寄存器、以及输出寄存器的监视。并且,可以进行寄存器的模拟输入、强制输出。IO 单元监视能够监视PLC 的输入输出单元的XY 设备。运行监视运行时间可以确认机器人的运行时间(POWER ON 等)。生产信息可以确认机器人控制器中的程序的运行时间、程序的周期数。1.5.1 机器人动作监视1) SLOT运行状态可以监视机器人控制器中的任务SLOT 状态。从工程树中,双击作为对象的工程的在线监视动作监视SLOT 状态。在软件Ver.1.6 版本以后,点击画面右下方的全停止按钮,可以对包括启动条件设定为ALWAYS 的项目,进行全SLOT 的停止。要编辑启动条件为ALWAY
19、S 的程序时,必须要使用此方法进行全SLOT 的停止。2) 程序监视可以监视动作中的程序信息。从工程树中,点击作为对象的工程的在线监视动作监视程序监视,之后双击要监视的任务SLOT。出现如下画面。程序信息变量监视区程序程序信息 可以确认当前选中的程序名、运行状态、连接中的机器人机型名。程序 当前选中的程序会被显示。 当前执行的行反转显示。变量监视可以确认当前选中的程序中所使用的变量的值。 需要监视的变量可以通过画面下方所显示的按钮来选择。追加 追加需要监视的变量。输入变量名,或者,从下拉列表中选择后,设定变量的种类,点击OK按钮。下拉列表中,程序所使用的变量会被显示。 从下拉列表选择变量的情况
20、下,变量的种类会自动选择。输入/选择监视变量的名称选择监视变量的种类选择 可以将需要监视的变量,从程序中使用的变量一览中进行批量选择。左边的列表中显示不显示的变量,右边的列表中显示要显示的变量。 从不显示的变量列表中,选择需要监视的变量,点击追加按钮。 选中的变量会追加到要显示的变量列表中去。 从要显示的变量列表中选择变量,点击删除后,从要显示的变量列表中删除,追加到不显示的变量列表中。点击OK按钮后,登录到要显示的变量列表中的变量,会显示在变量监视中,其值可以参照。删除 将变量监视中登录的变量,从监视列表中删除。 该操作,不会把程序中的变量删除。变更 可以变更变量监视中登录的变量的值。变量监
21、视中,选择要变更值的变量,然后点击变更按钮。确认变量名后,输入变量的值,点击OK按钮。读出 可以从文件中读出变量监视中要监视的变量。点击读出按钮后,可以从保存的文件中读出变量名、变量类型,作为要监视的变量来进行追加。保存 可以把变量监视中监视的变量一览保存到文件中去。点击保存按钮后可以把当前监视中的变量名、类型、值保存到文件中。文件会以文本形式被保存。3) 报警监视显示机器人控制器中当前发生的报错。从工程树中,双击作为对象的工程的在线监视动作监视报错。详细 可以确认发生报错的详细信息(原因和恢复方法)。历史 可以参考到目前为止所发生的报错的历史。合计 可以查看目前为止发生的报错的合计信息。此功
22、能在软件Ver1.7 以后的版本,且连接控制器的软件版本是R1j/S1j以后的版本时能够使用。1) 历史信息可以确认目前为止发生过的报错的历史。机器人控制器中的报错历史,可以按报错级别(高级别、低级别、警告)来确认。 并且,报错历史,还可以保存在文件中。点击历史信息按钮。选择要参照的报错级别后,点击OK按钮。 (1) 显示切换 将显示的报错历史按照各个报错级别再次显示。(2) 详细信息 选择要显示的报错后,点击该按钮,就可以确认错误的发生原因、恢复方法。双击需要显示的报错,也可以确认详细信息。(3) 保存 将所显示的报错历史信息保存到文件中。 用户可以按照需要保存报警记录,另外,报错历史文件是
23、以文本形式被保存的。 还可以使用记事本等一般的文本编辑器来打印。报错历史文件的文件名,以控制器的序列号_当前的日期_当前的时间来设定。文件名例:AR0703001_20100924_092623.txt1.5.2 信号监视信号监视可以确认从外部机器输入到机器人控制器的信号,从机器人控制器输出到外部机器的信号的状态。从工程树中,双击作为对象的工程的在线监视信号监视通用信号。上段中显示输入信号的状态,下段中显示输出信号的状态。需要显示的信号,可以通过监视设定自由设定连续范围。并且,可以实现信号的模拟输入、强制输出。1) 需要显示的信号,可以在连续范围内自由设定。在输入信号编号、输出信号编号中设定要
24、显示的信号的起始编号,在行中设定各自的显示范围后,点击OK按钮。2) 模拟输入,不是从外部机器,而是从电脑向机器人控制器输入信号。点击模拟输入按钮。会显示用于模拟输入信号的画面。(1) 首先读出模拟输入的信号。信号可以同时设定32 条。输入想要读出的信号的起始信号编号,点击设定按钮。(2) 从指定的信号开始,显示32 条信号输入状态。设定模拟输入的状态,点击位模拟输入设定按钮。(3) 另外,从起始信号编号开始的32 条,可以16 进制指定值,进行模拟输入。以16 进制输入值后,点击端口模拟输入。3) 强制输出从机器人控制器可以向外部机器强制输出信号。点击强制输出按钮。会显示用于强制输出信号的画
25、面。(1) 首先读出想要强制输出的信号。信号可以同时输出32 条。输入想要读出的信号的起始信号编号,点击设定按钮。(2) 从指定的信号开始,显示32 条信号输出状态。设定输出状态,点击位强制输出按钮。(3) 另外,从起始信号编号开始的32 条,可以以16 进制指定值后强制输出。以16 进制输入值后,点击端口强制输出。注:专用输出信号分配的(使用中)信号编号,不能强制输出。第二节 三菱示教器2.1 示教器概述2.1.1三菱示教器的安装1) 确认机器人控制器电源出去OFF状态.2) 将示教单元的连接器与机器人控制器上的示教器单元连接器连接。并将螺栓拧紧。如图所示。3) 示教单元安装结束。2.1.2
26、三菱示教器单元的拆卸1) 确认机器人控制器的电源车与状态。2) 松开机器人示教器单元的两处固定螺栓,握住连接器本身将其拔出,另外,将示教器单元的虚拟连接器连接。2.2 示教器操作面板介绍1) EMG.STOP 开关.进行伺服OFF,使机器人立即停止。2) TB ENABLE 开关.是对示教单元的按键操作有效无效进行切换的开关。3) 有效开.(3 位置开.).有效无效开关为有效时,如果松开或者强力按压将进行伺服,动作中的机器人将立即停止。4) 显示面板.显示机器人的状态及各菜单。5) 状态显示灯.显示示教单元。6) F1F2F3F4 键.执行显示7) FUNCTION 键.在1 个操中,F1F2
27、F3F4 键中分配的功能有5 个以,对功能显示进行切换。8) STOP 键.使程序中断,是机器人减速停止。9) OVRD OVRD 键.改变机器人的速度手动手动变更值。按压OVRD 键手工变动值将增加,按压OVRD 键时手工变动值将变少。10) JOG 操作 键.按照JOG 模式使机器人动作。此外,输入数值时,进行各数值的输入。11) SERVO 键.在轻按有效开关的同时,如果按压该键机器人将进行伺服。12) MONITOR 键.按压该键时,进入监视模式,显示监视菜单。13) JOG 键.按压该键时,将进入模式,显示画面。14) HAND 键.按压该键时,将进入抓手操作模式,显示抓手操作界面。
28、15) CHARACTER 键.示教单元在进行字符输入或数字输入时,通过数字字符功能键可在数字和字符间进行切换。16) RESET 键.对出错的显示进行解除,通过按压该键和键将进行程序复位。17) 键.将光标向各个方向移动。18) CLEAR 键.在进行数字或字符输入时,通过按压该键可将光标所在的位置字符删除一个字符。19) EXE 键.对输入操作进行确定。此外,直接进行时,在持续按压该键期间,机器人将动作。20) 数字/ 字符 键.在进行数字或字符输入时,按压该键将显示数字或字符。2.3 示教器使用方法2.3.1 示教器移动机器人(1) 关节JOG 操作按压JOG 键时将显示JOG画面。(画
29、面下侧显 示“JOG”)确认在画面上方显示为JOG模式的“直交”。显示为其它JOG模式的情况下,应按压“直交”对应的功能键。(在画面下方未显示希望的JOG模式的情况下,按压FUNCTION键可使其显示)结束JOG操作时,再次按压JOG键,或按压“关闭”对应的功能键。 每次按压OVRD键手工变动将按LOW HIGH 3 5 10 30 50 70 100% 的顺序增大,每次按压OVRD键时将按相反的方向减少。当前的设置速度显示在画面右上方及控制器的“STATUS NUMBER”中。在此为了进行确认作业应以10% 进行操作。 1 基于关节坐标系的移动 按压+X(J1) 键时J1轴向正方向旋转。 按
30、压+Y(J2) 键时J2轴向正方向旋转。按压-X(J1) 键时J1轴向负方向旋转。 按压-Y(J2) 键时J2轴向负方向旋转。 按压+Z(J3) 键时J3 轴向正方向旋转。 按压+A(J4)键时J4轴向正方向旋转。按压-Z(J3) 键时J3 轴向负方向旋转。 按压-A(J4)键时J4轴向负方向旋转。按压+B(J5)键时J5轴向正方向旋转。按压-B(J5)键时J5轴向负方向旋转。按压+C(J6)键时J6轴向正方向旋转。按压-C(J6)键时J6轴向负方向旋转。(2) 直角JOG操作按压JOG 键时将显示JOG画面。(画面下侧显 示“JOG”)确认在画面上方显示为JOG模式的“直交”。显示为其它JO
31、G模式的情况下,应按压“直交”对应的功能键。(在画面下方未显示希望的JOG模式的情况下,按压FUNCTION键可使其显示)结束JOG操作时,再次按压JOG键,或按压“关闭”对应的功能键。每次按压OVRD键手工变动将按LOW HIGH 3 5 10 30 50 70 100% 的顺序增大,每次按压OVRD键时将按相反的方向减少。当前的设置速度显示在画面右上方及控制器的“STATUS NUMBER”中。在此为了进行确认作业应以10% 进行操作。1 基于直角坐标系的移动按压+X(J1) 键时沿着X 轴的正方向移动。按压-X(J1) 键时沿着X 轴的负方向移动。按压+Y(J2) 键时沿着Y 轴的正方向
32、移动。按压-Y(J2) 键时沿着Y 轴的负方向移动。按压+Z(J3) 键时沿着Z 轴的正方向移动。按压-Z(J3) 键时沿着Z 轴的负方向移动。2.3.2 三菱机器人抓手的操作机器人抓手的开合是可以通过机器人示教单元进行操作的,多机器人抓手控制时,可按示教器上“HAND”键,显示抓手操作界面。1) 抓手的开合操作抓手1,按压+C(J6)键,打开抓手1,按压-C(J6)键,关闭抓手1;抓手2,按压+B(J5)键,打开抓手1;按压-B(J5)键,关闭抓手1;抓手3,按压+A(J4)键,打开抓手1;按压-A(J4)键,关闭抓手1;抓手4,按压+Z(J3)键,打开抓手1;按压-Z(J3)键,关闭抓手1
33、。Out 900-90776543210初始状态闭开闭开闭开闭开输出信号9079069059049039029019002) 抓手IO控制In 900-90776543210输入信号编号9079069059049039029019003.3.3 使用示教器编辑机器人指令(1)创建步骤1 确定机器人的动作顺序及动作2 将机器人的动作位置示教到位置变量3 以确定的动作顺序及动作位置的名称为基础将机器人的动作及作业替换成命令,通过程序进行记述并储存到控制器中.4 通过OG 操作将机器人移动至各动作位置,分别示教到各位置变量中.5 逐行执行储存在控制器中的程序,确认程序及动作位置储存正确.6 通过程序
34、的确认,在机器人的动作位置有错误时对位置进行修改.7 自动执行完成程序.(2)机器人作业使用机器人将工件从左搬运到右面,如图。(3)程序的创建动作顺序的确定开始1 移动至待机位置(关节动作)2 移动至工件上方20mm(关节动作)3 移动至抓工件的位置(直线运动)4 抓工件(抓手闭合)5 向上方移动20mm(直线运动)6 移动至松开工件位置的上方20mm(关节运动)7 移动至松开工件的位置(直线运动)8 松开工件(抓手张开)9 移动至上方20mm(直线运动)10 移动至待机位置(关节运动)结束注意:不对机器人的动作轨迹进行特别指定的动作为“关节动作”,将动作轨迹指定为直线的动作为“直线动作”。将
35、工件抓住的动作及松开的动作,工件等的外围有可能与机器人有干涉的情况下使用“直线运动”(4) 动作位置名称的确定名称位置变量名示教备注待机位置PWAIT示教-抓工件位置上方-不示教通过指令进行指定抓工件位置PGET示教-松开工件位置上方-不示教通过指令进行指定松开工件位置PPUT示教-注:位置变量名通过以P开头的任意字符串进行指定,最多16个字符串。(5)程序的记述与创建将目标机器人的动作及作业替换成指令目标动作*作业指令指定实例关节动作Mov移动至位置变量PWAITMov PWAIT移动至位置变量上方Mov PGET,+20直线动作Mvs移动至位置变量Mvs PGET移动至位置变量PGET上方
36、20mmMvs PGET,+20抓手张开Hopen抓手1张开Hopen 1抓手闭合Hcolse抓手1闭合Hcolse 1待机Dly等待1SDly 1结束End结束End(6)将替换的指令编辑为程序开始1 移动至待机位置(关节运动)1 Mov PWAIT2 移动至待机位置上方20mm(关机动作) 2 Mov PGET,+203 移动至抓工件的位置(直线运动)3 Mvs PGET4 抓工件(抓手闭合)4 HClose 15 等待1S 5 Dly 1.06 移动至上方20mm(直线运动)6 Mvs PGET,+207 移动至松开位置上方20mm位置(关节运动) 7 Mov PPUT,+208 移动至
37、松开工件的位置(直线运动)8 Mvs PPUT9 松开工件9 HOpen 110 等待1S10 Dly 1.011 移动至上方20mm的位置(直线运动)11 Mvs PPUT,+2012 移动至待机位置(关节运动) 12 Mov PWAIT结束 13 End(7)将程序输入到控制器中1 将控制器的模式置为“MANUAL”2 将示教器单元的“ENABLE”置为ENABLE3 在菜单画面中,按压方将光标对准“文件/编辑”后,按压“EXE”键,显示“管理/编辑”画面 4 按压F3( 新建) 键。显示新建程序5 按压1、EXE 键。打开程序编辑号1的编辑界面。 6 按压F3( 插入) 键。光标闪烁变成
38、输入状态7 确认处于输入模式后,按压1键步号”1”将被输入. 8 按压CHARACTER 键,置为字符输入模式后,对SP和MNO键各按压一次,显示空格及“M”。9 如上述步骤输入其它指令。程序输入结束对机器人的动作位置进行示教1 通过JOG 操作使机器人动作,将抓手前段对准抓工件的位置。对准位置后,执行抓手开闭动作,确认工件已经抓牢。2 在指令编辑画面中,按压“FUNCTION”键,对功能显示进行切换。10 按压F3(NEXT)键或F4(PREV)键,使画面右上方显示“”。11 按压()键,显示示教确认画面。12 按压()键进行位置登录13 按以上方式示教机器人的其它点位14 至此机器人的动作位置示教结束(8)程序确认使用示教单元逐行执行程序,对程序动作进行确认。在确认过程中,通过轻按示教单元的有效开关,按压“”键置为“”状态。1 通过“”键将功能界面切换到程序界面。 2 持续按压“”键,机器人开始动作。3 按照以上动作将机器人程序运行到“End”。
- 温馨提示:
1: 本站所有资源如无特殊说明,都需要本地电脑安装OFFICE2007和PDF阅读器。图纸软件为CAD,CAXA,PROE,UG,SolidWorks等.压缩文件请下载最新的WinRAR软件解压。
2: 本站的文档不包含任何第三方提供的附件图纸等,如果需要附件,请联系上传者。文件的所有权益归上传用户所有。
3.本站RAR压缩包中若带图纸,网页内容里面会有图纸预览,若没有图纸预览就没有图纸。
4. 未经权益所有人同意不得将文件中的内容挪作商业或盈利用途。
5. 装配图网仅提供信息存储空间,仅对用户上传内容的表现方式做保护处理,对用户上传分享的文档内容本身不做任何修改或编辑,并不能对任何下载内容负责。
6. 下载文件中如有侵权或不适当内容,请与我们联系,我们立即纠正。
7. 本站不保证下载资源的准确性、安全性和完整性, 同时也不承担用户因使用这些下载资源对自己和他人造成任何形式的伤害或损失。
