 智能交通控制系统设计课程设计报告
智能交通控制系统设计课程设计报告

《智能交通控制系统设计课程设计报告》由会员分享,可在线阅读,更多相关《智能交通控制系统设计课程设计报告(15页珍藏版)》请在装配图网上搜索。
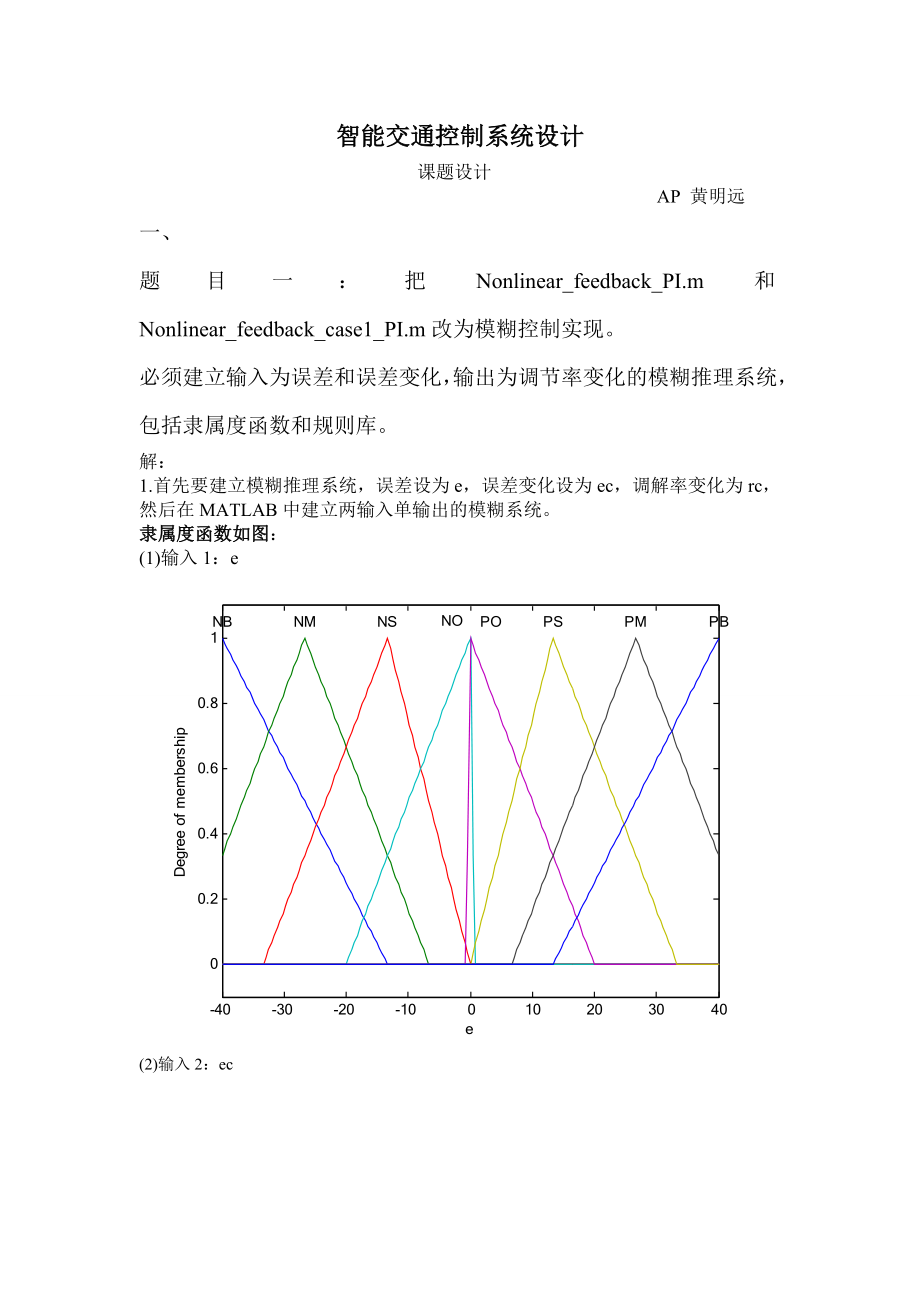
1、智能交通控制系统设计 课题设计 AP 黄明远一、题目一:把Nonlinear_feedback_PI.m和Nonlinear_feedback_case1_PI.m改为模糊控制实现。必须建立输入为误差和误差变化,输出为调节率变化的模糊推理系统,包括隶属度函数和规则库。解:1. 首先要建立模糊推理系统,误差设为e,误差变化设为ec,调解率变化为rc,然后在MATLAB中建立两输入单输出的模糊系统。隶属度函数如图:(1)输入1:e(2)输入2:ec(3)输出:rc模糊规则是:showrule(a)ans =1. If (e is NB) and (ec is NB) then (rc is NB)
2、 (1) 2. If (e is NB) and (ec is NM) then (rc is NB) (1) 3. If (e is NB) and (ec is NS) then (rc is NB) (1) 4. If (e is NB) and (ec is ZO) then (rc is NB) (1) 5. If (e is NB) and (ec is PS) then (rc is NM) (1) 6. If (e is NB) and (ec is PM) then (rc is ZO) (1) 7. If (e is NB) and (ec is PB) then (rc
3、is ZO) (1) 8. If (e is NM) and (ec is NB) then (rc is NB) (1) 9. If (e is NM) and (ec is NM) then (rc is NB) (1) 10. If (e is NM) and (ec is NS) then (rc is NB) (1)11. If (e is NM) and (ec is ZO) then (rc is NB) (1)12. If (e is NM) and (ec is PS) then (rc is NM) (1)13. If (e is NM) and (ec is PM) th
4、en (rc is ZO) (1)14. If (e is NM) and (ec is PB) then (rc is ZO) (1)15. If (e is NS) and (ec is NB) then (rc is NM) (1)16. If (e is NS) and (ec is NM) then (rc is NM) (1)17. If (e is NS) and (ec is NS) then (rc is NM) (1)18. If (e is NS) and (ec is ZO) then (rc is NM) (1)19. If (e is NS) and (ec is
5、PS) then (rc is ZO) (1)20. If (e is NS) and (ec is PM) then (rc is PS) (1)21. If (e is NS) and (ec is PB) then (rc is PS) (1)22. If (e is NO) and (ec is NB) then (rc is NM) (1)23. If (e is NO) and (ec is NM) then (rc is NM) (1)24. If (e is NO) and (ec is NS) then (rc is NS) (1)25. If (e is NO) and (
6、ec is ZO) then (rc is ZO) (1)26. If (e is NO) and (ec is PS) then (rc is PS) (1)27. If (e is NO) and (ec is PM) then (rc is PM) (1)28. If (e is NO) and (ec is PB) then (rc is PM) (1)29. If (e is PO) and (ec is NB) then (rc is NM) (1)30. If (e is PO) and (ec is NM) then (rc is NM) (1)31. If (e is PO)
7、 and (ec is NS) then (rc is NS) (1)32. If (e is PO) and (ec is ZO) then (rc is ZO) (1)33. If (e is PO) and (ec is PS) then (rc is PS) (1)34. If (e is PO) and (ec is PM) then (rc is PM) (1)35. If (e is PO) and (ec is PB) then (rc is PM) (1)36. If (e is PS) and (ec is NB) then (rc is NS) (1)37. If (e
8、is PS) and (ec is NM) then (rc is NS) (1)38. If (e is PS) and (ec is NS) then (rc is ZO) (1)39. If (e is PS) and (ec is ZO) then (rc is PM) (1)40. If (e is PS) and (ec is PS) then (rc is PM) (1)41. If (e is PS) and (ec is PM) then (rc is PM) (1)42. If (e is PS) and (ec is PB) then (rc is PM) (1)43.
9、If (e is PM) and (ec is NB) then (rc is ZO) (1)44. If (e is PM) and (ec is NM) then (rc is ZO) (1)45. If (e is PM) and (ec is NS) then (rc is PM) (1)46. If (e is PM) and (ec is ZO) then (rc is PB) (1)47. If (e is PM) and (ec is PS) then (rc is PB) (1)48. If (e is PM) and (ec is PM) then (rc is PB) (
10、1)49. If (e is PM) and (ec is PB) then (rc is PB) (1)50. If (e is PB) and (ec is NB) then (rc is ZO) (1)51. If (e is PB) and (ec is NM) then (rc is ZO) (1)52. If (e is PB) and (ec is NS) then (rc is PM) (1)53. If (e is PB) and (ec is ZO) then (rc is PB) (1)54. If (e is PB) and (ec is PS) then (rc is
11、 PB) (1)55. If (e is PB) and (ec is PM) then (rc is PB) (1)56. If (e is PB) and (ec is PB) then (rc is PB) (1)2. 然后(1)在Nonlinear_feedback_PI.m原程序段中: dr(k+1)=k1*(e(k+1)-e(k)+k2*e(k+1) 改为: dr(k+1)=evalfis(e(k+1) de(k+1),readfis(E:eecrc.fis);及将k1=100;k2=70注释掉可以满足要求,目的是能够调用模糊控制推理系统eecrc.fis。运行后结果为:(2) 同
12、理:Nonlinear_feedback_case1_PI.m题目中, dr(k+1)=k1*de(k+1)+k2*e(k+1)改为dr(k+1)=evalfis(e(k+1) de(k+1),readfis(E:eecrc.fis);及将k1=17.3;k2=13.0;注释掉可以满足要求,目的是能够调用模糊控制推理系统eecrc.fis。运行后结果为:1)2)3. 修改模糊控制模块中隶属度函数并进行对比:修改后的隶属度函数如下图,折线更加规范及重叠的区域更少,使运行出来的结果更加准确。运行结果如图:可以知道密度的振荡变化更少,更多的数据接近34.1600,所以对于修改模糊系统中的隶属度函数将
13、会有助于结果的精确化。二、题目二:2012届张志康同学的毕业设计,三角形隶属度函数的仿真结果正确,但高斯隶属度函数的仿真结果错误。要求修改高斯隶属度函数,使高斯隶属度函数的仿真结果也正确。解:1.程序修改说明积分参数范围改为550;即:%MinX(2)=58*ones(1);%MaxX(2)=107*ones(1);MinX(2)=5*ones(1);MaxX(2)=50*ones(1);2. 张志康毕业设计-改为高斯曲线可满足任务要求,不需要修改推理系统里面的规则。 (1) 隶属度函数:输入1,误差e:(2) 输入2,误差变化ec:(3)输出,调节率变化rc:(3) 模糊规则:1. If (
14、e is NB) and (ec is NB) then (rc is NB) (1)2. If (e is NB) and (ec is NM) then (rc is NB) (1)3. If (e is NB) and (ec is NS) then (rc is NM) (1)4. If (e is NM) and (ec is NB) then (rc is NB) (1)5. If (e is NM) and (ec is NM) then (rc is NM) (1)6. If (e is NM) and (ec is NS) then (rc is NS) (1)7. If (
15、e is NS) and (ec is NB) then (rc is NM) (1)8. If (e is NS) and (ec is NM) then (rc is NS) (1)9. If (e is NS) and (ec is NS) then (rc is NS) (1)3. 运行后可得结果:经19个迭代,kg =1BJ =0.0576BestS =250.9754 48.6767kg =2BJ =0.0353BestS =250.9754 48.6767kg =3BJ =0.0353BestS =250.9754 48.6767kg =4BJ =0.0353BestS =250
16、.9754 48.6767kg =5BJ =0.0353BestS =250.9754 48.6767kg =6BJ =0.0353BestS =250.9754 48.6767kg =7BJ =0.0352BestS =250.9754 48.6767kg =8BJ =0.0353BestS =250.9754 48.6767kg =9BJ =0.0353BestS =250.9754 48.6767kg =10BJ =0.0353BestS =250.9754 48.6767kg =11BJ =0.0353BestS =250.9754 48.6767kg =12BJ = 0.0353Be
17、stS =250.9754 48.6767kg =13BJ =0.0353BestS =250.9754 48.6767kg =14BJ =0.0353BestS =250.9754 48.6767kg =15BJ =0.0353BestS =250.9754 48.6767kg =16BJ =0.0353BestS =250.9754 48.6767kg =17BJ =0.0353BestS =250.9754 48.6767kg =18BJ =0.0353BestS =250.9754 48.6767kg =19BJ =0.0353BestS =250.9754 48.6767Elapse
18、d time is 3504. seconds.Bestfi =28.3457BestS =250.9754 48.6767Best_J =0.0353如图:最后,由图可得出实际密度为34.1600辆(千米车道),与理想的交通密度一致,所以可得修改后高斯隶属度函数的仿真结果正确。总结感悟:经过这次课题设计,我不仅学到了MATLAB的操作要领,还学会建立模糊推理系统解决复杂的问题。根据题目要求,自学操作,讨论实践,逐步完成任务过程中,收获良多。对于模糊推理系统的建立,需要隶属度函数与模糊规则的确立,而确立规则需要的是对问题的多次观察与实践得出的经验,即人的控制经验或多次控制实验的结果。 从中也认识到模糊控制系统设计比较简单,具有自适应性和鲁棒性,是一种简单和有效的智能控制方法。模糊控制无须建立被控对象的数学模型,对于结构复习、系统机理认识不清楚、非线性、时变系统具有较好的控制效果,如这次对于高速公路匝道非线性反馈控制器的设计。入口匝道控制其实是一个比较复杂的,而且难以定性的设计过程,现在运用模糊控制系统可以简化问题,并有效解决问题,结果也更为准确。
- 温馨提示:
1: 本站所有资源如无特殊说明,都需要本地电脑安装OFFICE2007和PDF阅读器。图纸软件为CAD,CAXA,PROE,UG,SolidWorks等.压缩文件请下载最新的WinRAR软件解压。
2: 本站的文档不包含任何第三方提供的附件图纸等,如果需要附件,请联系上传者。文件的所有权益归上传用户所有。
3.本站RAR压缩包中若带图纸,网页内容里面会有图纸预览,若没有图纸预览就没有图纸。
4. 未经权益所有人同意不得将文件中的内容挪作商业或盈利用途。
5. 装配图网仅提供信息存储空间,仅对用户上传内容的表现方式做保护处理,对用户上传分享的文档内容本身不做任何修改或编辑,并不能对任何下载内容负责。
6. 下载文件中如有侵权或不适当内容,请与我们联系,我们立即纠正。
7. 本站不保证下载资源的准确性、安全性和完整性, 同时也不承担用户因使用这些下载资源对自己和他人造成任何形式的伤害或损失。
