 32箱形梁的约束扭转ppt课件
32箱形梁的约束扭转ppt课件

《32箱形梁的约束扭转ppt课件》由会员分享,可在线阅读,更多相关《32箱形梁的约束扭转ppt课件(27页珍藏版)》请在装配图网上搜索。
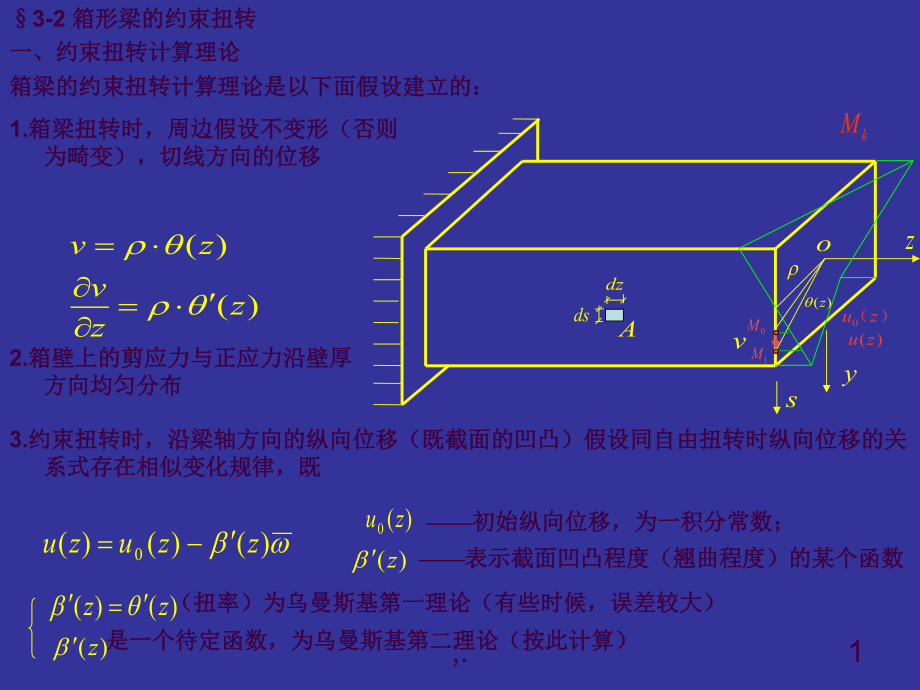
1、3-2 箱形梁的约束扭转箱形梁的约束扭转kMzdz0M1M)(zu0)(zds)(zuAvyso一、约束扭转计算理论一、约束扭转计算理论箱梁的约束扭转计算理论是以下面假设建立的:箱梁的约束扭转计算理论是以下面假设建立的:1.箱梁扭转时,周边假设不变形(否则箱梁扭转时,周边假设不变形(否则为畸变),切线方向的位移为畸变),切线方向的位移)()(zzvzv2.箱壁上的剪应力与正应力沿壁厚箱壁上的剪应力与正应力沿壁厚方向均匀分布方向均匀分布3.约束扭转时,沿梁轴方向的纵向位移(既截面的凹凸)假设同自由扭转时纵向位移的关约束扭转时,沿梁轴方向的纵向位移(既截面的凹凸)假设同自由扭转时纵向位移的关系式存
2、在相似变化规律,既系式存在相似变化规律,既)()()(0zzuzu )(0zu初始纵向位移,为一积分常数;初始纵向位移,为一积分常数;)(z表示截面凹凸程度(翘曲程度)的某个函数表示截面凹凸程度(翘曲程度)的某个函数)()(zz(扭率)为乌曼斯基第一理论(有些时候,误差较大)(扭率)为乌曼斯基第一理论(有些时候,误差较大))(z是一个待定函数,为乌曼斯基第二理论(按此计算)是一个待定函数,为乌曼斯基第二理论(按此计算)1;.kMzdz0M1M)(zu0)(zds)(zuAvyso二、约束扭转正应力二、约束扭转正应力利用弹性力学中平面应力问题中应力与应变之间的关系式:利用弹性力学中平面应力问题中
3、应力与应变之间的关系式:)(12SZwE因为假设周边不变形,切线方向的应因为假设周边不变形,切线方向的应变为零,既变为零,既0S)243()()()()(1002 zzuEzzuzuEEwZw)(0zukMwyx,上式中上式中 是未定的,我们可以利用平衡条件来消去它,因为箱梁截面上只有扭矩是未定的,我们可以利用平衡条件来消去它,因为箱梁截面上只有扭矩 ,其引起翘曲正应力其引起翘曲正应力 自相平衡,既正应力总和为零(有拉伸就有压缩),这些力对自相平衡,既正应力总和为零(有拉伸就有压缩),这些力对 轴弯矩总和也是零,因而有:轴弯矩总和也是零,因而有:)253(000 xdAMydAMdANwywx
4、w2;.kMzdz0M1M)(zu0)(zds)(zuAvyso将式(将式(3-24)代入得:)代入得:)263(0)()(0)()(0)()(000 ydAzydAzuxdAzxdAzudAzAzudAxdA式中式中:为扇性静矩(面积对扇性坐标的为扇性静矩(面积对扇性坐标的一次矩,类似一次矩,类似 )ydAxdA扇性惯性积(类似扇性惯性积(类似 )ydAx若适当选择极点若适当选择极点 ,及扇性零点,及扇性零点 位置,使满足下列三个条件:位置,使满足下列三个条件:o0M000ydAxdAdA此时极点此时极点 为主扇性极点,为主扇性极点,为主扇性零点。为主扇性零点。o0M0S0 xyIo0M(这
5、相当于材料力学计算弯曲时求形心、主惯性轴以静矩(这相当于材料力学计算弯曲时求形心、主惯性轴以静矩 、惯性积、惯性积 为条件,为条件,极点极点 相当于形心相当于形心,相当于惯性主轴,最后以形心主惯性轴为坐标)相当于惯性主轴,最后以形心主惯性轴为坐标)3;.先假定存在这么一点满足这三个条件,由式(先假定存在这么一点满足这三个条件,由式(3-26)知,这样()知,这样(3-24)可以写成:)可以写成:kMzdz0M1M)(zu0)(zds)(zuAvyso)283()(zEw截面上的约束扭转正应力分布和广义扇性截面上的约束扭转正应力分布和广义扇性坐标成正比,但此时的广义扇性坐标坐标成正比,但此时的广
6、义扇性坐标 是是相对于主扇性零点相对于主扇性零点 的广义扇性主坐标的广义扇性主坐标(是截面位置是截面位置 的函数,在某一具体的函数,在某一具体截面上它为常数)截面上它为常数)0M)(z z如令如令 (约束扭转正应力对广义扇性坐标的矩)(约束扭转正应力对广义扇性坐标的矩)dAdBwkMB在整个截面上积分得:在整个截面上积分得:dABw(类同截面弯矩(类同截面弯矩 一样,又是一种内一样,又是一种内力)力)AxydAM称为约束扭转双力矩称为约束扭转双力矩这是一个自相平衡的力系,其数值不可能根据已知外力由平衡方程来求得,而要用约束扭这是一个自相平衡的力系,其数值不可能根据已知外力由平衡方程来求得,而要
7、用约束扭转微分方程的积分来求。转微分方程的积分来求。4;.kMzdz0M1M)(zu0)(zds)(zuAvyso )293()()(2zEIdAzEB将式(将式(3-28)代入得:)代入得:式中:式中:称为广义主扇性惯性矩称为广义主扇性惯性矩dAI2此时与材料力学中弯矩和曲率关系式在形此时与材料力学中弯矩和曲率关系式在形式上很相似式上很相似dAyI2yEIM 由式(由式(3-28):):)303()(Ezw代入式(代入式(3-39)得:)得:IMyIBw约束扭转正应力分布与广义扇性主坐标成正比。约束扭转正应力分布与广义扇性主坐标成正比。(面积对广义扇性坐标的二次矩,这相当(面积对广义扇性坐标
8、的二次矩,这相当于弯曲时截面主惯性矩于弯曲时截面主惯性矩 )?)(z主扇性极点如何求?主扇性极点如何求?5;.三、约束扭转剪应力三、约束扭转剪应力取箱壁上取箱壁上A点的微分方程,点的微分方程,根据力的平衡,列根据力的平衡,列 方向上的平衡方程得:方向上的平衡方程得:kMzdz0M1M)(zu0)(zds)(zuAvysodzdsz将式(将式(3-28)代入上式得:)代入上式得:0tdsztdszwwdAzEdstzdstsw )()313()()(000 StzEdAztEsw任选一个始点任选一个始点,定为,定为 ,将上,将上式积分到式积分到 ,得,得0sszsdztdssww)(dztdzz
9、ww)(无挤压)0tdswtdzwA式中:式中:swdAS0 称为扇性静矩;称为扇性静矩;0是始点的约束剪应力,根据内外力矩平衡条件可是始点的约束剪应力,根据内外力矩平衡条件可求:求:tdshMwkdshkMwt6;.将式(将式(3-31)代入上式得:)代入上式得:)()()(00ddshdSzEttdshStzEMk因此:因此:)()(0ddshdStzEtMk将其代入式(将其代入式(3-31)得:)得:kMzdz0M1M)(zu0)(zds)(zuAvyso tMdStzEStzEk)()(上式整理得:上式整理得:)343()(StzEtMk式中:式中:)353(1dSSS 称为折算主扇性
10、静矩称为折算主扇性静矩tMkkStzEw)(由式(由式(3-34)可见约束扭转截面上的剪应力为两项剪应力之和,第)可见约束扭转截面上的剪应力为两项剪应力之和,第一项是自由扭转剪应力一项是自由扭转剪应力 ,第二项是由于约束扭转正应力沿,第二项是由于约束扭转正应力沿纵向变化而引起的剪应力为纵向变化而引起的剪应力为 。7;.对扭转双力矩式(对扭转双力矩式(3-29)进行微分:)进行微分:kMzdz0M1M)(zu0)(zds)(zuAvyso)(zEIdzdB 以以 表示表示 得:得:MdzdB)363()(zEIMM称为弯曲扭矩(或弯扭力矩),将其代入式(称为弯曲扭矩(或弯扭力矩),将其代入式(3
11、-34)得:)得:StIMtMkyEIQ 公式(公式(3-36)与材料力学中一般梁的剪力和挠度的关系式()与材料力学中一般梁的剪力和挠度的关系式()在形式上是相似)在形式上是相似的,式(的,式(3-37)第二式:)第二式:tIQSStIMw*相似相似 8;.四、确定扭转中心位置四、确定扭转中心位置)303(IBw)373(tISMwsstdsstds0,约束扭转正应力约束扭转正应力约束扭转剪应力约束扭转剪应力其中广义扇性坐标其中广义扇性坐标是以主扇性极点为极点,选取某一广义主扇性零点(不止一个)为起点的广义扇性坐标,是以主扇性极点为极点,选取某一广义主扇性零点(不止一个)为起点的广义扇性坐标,
12、根据其定义,必然满足(根据其定义,必然满足(3-27)式:)式:000ydAIxdAIdASxy使得使得0)(0 zu(相当于求主惯性轴)(相当于求主惯性轴),(bbyxB),(aayxAxy为求得扭转中心为求得扭转中心A,将其作为极点的扇性坐标用,将其作为极点的扇性坐标用 表示,另外任选参考极点极点表示,另外任选参考极点极点B,相对极点,相对极点B的扇性的扇性坐标用坐标用 表示,两者之间的关系(推导略)表示,两者之间的关系(推导略)AB9;.),(bbyxB),(aayxAxybaybaxxyBAyyxxcyx)293(C:积分常数:积分常数因为因为A点为扭转中心,则满足(点为扭转中心,则满
13、足(3-27)式)式000ydAIxdAIdASAxAyA将式(将式(3-29)代入:)代入:)403(xxyyxxxyyyxyxyyyxxcSIIIcSIIIcFSSSBBB可求得可求得cyx,继而可求扭转中心继而可求扭转中心A的坐标的坐标byabxayyxx因因B()是随意选取的,如取为坐标原点)是随意选取的,如取为坐标原点 即即 ;而且在截面形心,;而且在截面形心,则则 ,如适当选择扇性坐标起点,使如适当选择扇性坐标起点,使 ,得,得 ,则由可得:则由可得:bbyx,0,0bbyxayaxyxyxSS,0,00dASBB0c22xyyxxxyxyaxyyxxxyyyaIIIIIIIyII
14、IIIIIx10;.与弯曲中心计算公式(与弯曲中心计算公式(2-29)相同,可知弯曲中心和扭心为同一点,如再以此作为主扇性)相同,可知弯曲中心和扭心为同一点,如再以此作为主扇性极点,三点具有同一性。极点,三点具有同一性。如果如果 轴为主惯性轴,则轴为主惯性轴,则 得得yx,0 xyI)423(,yyaxxaIIyIIxBB作用于箱梁上的任意荷载均可分为对称荷载和反对称荷载:作用于箱梁上的任意荷载均可分为对称荷载和反对称荷载:对称荷载引起弯曲,反对称荷载引起扭转,如果假设箱梁截面周边不变形为刚性扭转,可对称荷载引起弯曲,反对称荷载引起扭转,如果假设箱梁截面周边不变形为刚性扭转,可以认为整个横截面
15、的位移是由弯曲引起的平动和扭转引起的转动合成的刚体平面运动,如以认为整个横截面的位移是由弯曲引起的平动和扭转引起的转动合成的刚体平面运动,如果将截面任一点的位移分成扭转引起的绕某一点的转动位移和弯曲引起的线位移,当考虑果将截面任一点的位移分成扭转引起的绕某一点的转动位移和弯曲引起的线位移,当考虑弯曲变形,合力作用通过该点时,截面只弯不扭,该点为剪切中心,该点只有线位移;当弯曲变形,合力作用通过该点时,截面只弯不扭,该点为剪切中心,该点只有线位移;当只考虑扭转,该点不动,整个截面绕该点转动,该点为扭转中心,同一个点两个不同概念。只考虑扭转,该点不动,整个截面绕该点转动,该点为扭转中心,同一个点两
16、个不同概念。P2P2P2P2P11;.如果截面绕某一点转动时,为表示从如果截面绕某一点转动时,为表示从A到到B的位移,用扇性面积的位移,用扇性面积OAB表示,既表示相对某点(扭心)的距离,又表示了该点的位移表示,既表示相对某点(扭心)的距离,又表示了该点的位移大小。这也就是为什么讨论扭转问题时,均用截面的扇性特性。大小。这也就是为什么讨论扭转问题时,均用截面的扇性特性。oAB)(hS如极点不选择在扭转中心,该点本身还有转动位移,其位移只是相对位移,如为了求某一如极点不选择在扭转中心,该点本身还有转动位移,其位移只是相对位移,如为了求某一点的绝对位移,扭转中心选为主扇性极点。点的绝对位移,扭转中
17、心选为主扇性极点。例例3-2 求图示开口截面的主扇性极点、主扇性零点和主扇性坐标求图示开口截面的主扇性极点、主扇性零点和主扇性坐标1234a)(A1510s1501.157.117.18440NBb10cm1cm12345cm)(Aoxy15cm)(a)(b)(c12;.1234a)(A1510s150解:解:)(b1任意选择坐标系,如图(任意选择坐标系,如图(a)2选择辅助极点选择辅助极点A,为方便起见将,为方便起见将A点取在坐标原点,绘点取在坐标原点,绘 图(极点图(极点A的扇性坐标)的扇性坐标)3计算横截面的面积、静矩、惯性量和扇性特征量计算横截面的面积、静矩、惯性量和扇性特征量2)43
18、()32(442223242232333011511015)00;00(750)(515110376)210(11012101)25(1512151337515110)215(115121515.6221011025155.26221511515110cmFyIxIcmbaAxydaIcmdAxIcmdAyIcmxdAScmydASxyxyAxyAyAxAyAxsads010cm1cm12345cm)(Aoxy15cm)(a13;.1234a)(A1510s150绘出相对绘出相对A点的扇性坐标如图(点的扇性坐标如图(b),(),(23)、()、(34)截面相交)截面相交于于A点,其扇性坐标为零
19、点,其扇性坐标为零)(b(12)截面:)截面:xyxdsdsxsa151500(角度逆时针为正)(角度逆时针为正)扇性静矩:扇性静矩:410075021101501mdxdASAaaa扇性惯性积:扇性惯性积:1005221125921015151511515cmdxxdxxydAIAAaxa53500031015115cmdxxxxdAIAAaya代入式(代入式(3-40)得(此题中的)得(此题中的A点既公式中的点既公式中的B点)点))403(xxyyxxxyyyxyxyyyxxcSIIIcSIIIcFSSSaaa)403(750305.625.26250005.62376750112505.
20、2627503375ccIcyxyxyx代入上面数值代入上面数值解之得:解之得:1.1835.1299.1ccmyx14;.4求主扇性极点坐标,由式(求主扇性极点坐标,由式(3-39)abyabxyyxx0,0aayx则:则:35.1299.1bbyx5绘制主扇性坐标图绘制主扇性坐标图 并求主零点位置并求主零点位置b将将 代入式(代入式(3-39)cyx,1.1899.135.12yxba对于不同坐标点计算如下表:对于不同坐标点计算如下表:点号点号11015-150-15.12015011.73000-18.1450044xyab扇性零点不止一个扇性零点不止一个,选距主扇性极点最近的零点选距主
21、扇性极点最近的零点,称称为主扇性零点为主扇性零点.由此可见离主扇性极点最近的零点由由此可见离主扇性极点最近的零点由图可见,离主扇性极点最近的零点,此为图可见,离主扇性极点最近的零点,此为 所求的所求的主零点,该点坐标可由图算出:主零点,该点坐标可由图算出:7.111.181500NNyy0N由此:由此:cmyN1.97.111.18151.180该题也可以先求出形心主惯性轴,然后按是该题也可以先求出形心主惯性轴,然后按是(3-42)求得)求得1.157.117.18440NBbyx)35.12,99.1()(C15;.五、约束扭转的微分方程及其解五、约束扭转的微分方程及其解显然,为确定约束扭转
22、正应力及剪应力,都必须确定任意函数显然,为确定约束扭转正应力及剪应力,都必须确定任意函数 (前面以求出主极点和相(前面以求出主极点和相对其极点的广义扇性坐标对其极点的广义扇性坐标广义扇性主坐标)广义扇性主坐标))(z双力矩:双力矩:)293()(zEIB约束扭转正应力:约束扭转正应力:)303(IBW弯扭力矩:弯扭力矩:)363()(zEIM约束扭转剪应力:约束扭转剪应力:)373(tISMtMzW)(z如何求如何求?纵向位移与剪应力的关系,如式(纵向位移与剪应力的关系,如式(3-16))(zhsuG而约束扭转剪应力与外扭矩之间的关系,由式(而约束扭转剪应力与外扭矩之间的关系,由式(3-34)
23、StzEtGMZ)(16;.两式相等,并移项得:两式相等,并移项得:hzStzEtGMsuz )()()(),(,zzMzzM)(z)(z)()(zzS此式中包含此式中包含 的关系,的关系,为外扭矩已知,为寻找为外扭矩已知,为寻找 与与 的关系,根据约的关系,根据约束扭转的乌曼斯基第一理论束扭转的乌曼斯基第一理论 既表示翘曲程度的函数既表示翘曲程度的函数 等于扭转角等于扭转角 ,在,在某些情况下,它将导致不可允许的误差,根据乌曼斯基第二理论,某些情况下,它将导致不可允许的误差,根据乌曼斯基第二理论,不等于不等于 ,只是只是相似相似 的一个待定函数,现沿周边(既的一个待定函数,现沿周边(既 )积
24、分得:)积分得:kMzdz0M1M)(zu0)(zds)(zuAvyso)()()(0zzuzu sszshdsztdsGMtdsSGzEuu0000)()(0u 为积分常数,起点的纵向位移,引入封为积分常数,起点的纵向位移,引入封闭条件,积分一周闭条件,积分一周 (起点既终点),(起点既终点),则:则:)()(00ztdsGMtdsSGzEuuz0uu 0)()(ztdsGMtdsSGzEz上式对进行微分一次,经整理:上式对进行微分一次,经整理:)443()()(020)4(mSGztdsSSEz17;.)443()()(020)4(mSGztdsSSEz式中:式中:tdsS0 dzzdMm
25、z)(02SId为外扭矩集度为外扭矩集度为自由扭转惯性矩见式(为自由扭转惯性矩见式(3-5)zzmmzMzM根据分部积分和广义主扇性惯性矩的定义(式根据分部积分和广义主扇性惯性矩的定义(式3-29)可知:)可知:ItdsSS0(证明见(证明见 )54P式(式(3-44)可写成:)可写成:)493()()()4(mGIzzEId)(),(zz此微分方程两个未知函数此微分方程两个未知函数 无法直接求解,必须再补充一个方程,在计算自由无法直接求解,必须再补充一个方程,在计算自由扭转纵向位移和假设截面约束扭转纵向位移时:扭转纵向位移和假设截面约束扭转纵向位移时:)233()()()()223()()(
26、)(00zzuzuzzuzu截面截面 处的扭矩:处的扭矩:(均匀扭矩)(均匀扭矩)(线性扭矩)(线性扭矩)mzmdzMzz0221mzz18;.)233()()()()223()()()(00zzuzuzzuzu我们知道我们知道 是表示截面翘曲程度的函数,对自由扭转扭率是表示截面翘曲程度的函数,对自由扭转扭率 对具体截面是常数,它对具体截面是常数,它的变化规律在整个截面上只与广义扇性坐标相同。而对约束扭转如果假设对纵向位移的约的变化规律在整个截面上只与广义扇性坐标相同。而对约束扭转如果假设对纵向位移的约束(约束扭转的定义)在整个截面上是相同的(不是对那点大一点,对哪点小一点),使束(约束扭转的
27、定义)在整个截面上是相同的(不是对那点大一点,对哪点小一点),使得纵向位移与自由扭转的位移有相似的变化规律,只是因为有了约束使其数值按比例发生得纵向位移与自由扭转的位移有相似的变化规律,只是因为有了约束使其数值按比例发生了变化,这里了变化,这里 是任意函数,不是是任意函数,不是 ,既乌氏第二理论。由此可知约束,既乌氏第二理论。由此可知约束扭转翘曲正应力的分布规律也因扭转翘曲正应力的分布规律也因纵向位移与广义扇性主坐标相同,纵向位移与广义扇性主坐标相同,它的分布规律与广义扇性主坐标它的分布规律与广义扇性主坐标相同(怎样的纵向位移,就产生相同(怎样的纵向位移,就产生怎样约束,得到怎样的正应力)。怎
28、样约束,得到怎样的正应力)。)(zu)(z)(z)(zkMzdz0M1M)(zu0)(zds)(zuAvyso19;.利用内、外扭矩平衡方程利用内、外扭矩平衡方程)323(hdAMzhdAzMxy由式(由式(3-16)知:)知:)163()(zhsuG由式(由式(3-23)知:)知:sstdstdshdszzuszzuzzuzu00000)()()()()()()(代入式(代入式(3-16)则:)则:ttdsss10hhdsss0)()1)(zhhttdszG代入式(代入式(3-32)得:)得:20;.hdAzhhttdszGMz)()1)(hdsdAhzdAhtdshttdsz22)(1)(
29、dAhzdAhtdsz222)()(tdsdA上式中令:上式中令:dAhI2dAh(截面上微面积(截面上微面积 相对其到极点的垂直距离相对其到极点的垂直距离 的二次矩)的二次矩)称为截面的方向惯性矩称为截面的方向惯性矩dAhxydIItdsId2(截面的抗扭惯性矩)(截面的抗扭惯性矩)代入上式整理得:代入上式整理得:)533()()1)(zIIzGIMdz21;.如令:如令:(称为截面约束系数,反映了约束程度)(称为截面约束系数,反映了约束程度)IId1对于圆形截面:对于圆形截面:0IId则式(则式(3-53)为:)为:)(zGIMz为自由扭转方程,方向惯性矩和抗扭惯性矩统称为极惯性矩为自由扭
30、转方程,方向惯性矩和抗扭惯性矩统称为极惯性矩对于矩形截面:对于矩形截面:ab长边为长边为 ,短边为,短边为 则:则:ab)(2)2()(2222baabtdsIbaabdAhId2)(41baab如果如果nbbbbba,4,3,2,4,)1(4,36.0,25.0,111.0,022nn扭转角方程趋近于开口截面扭转角方程趋近于开口截面 式(式(3-53)又可写成:)又可写成:)()(zzGIMz22;.对对 微分三次:微分三次:z)()()()4()4(zzGIzMz 如果如果 是是 的二次函数或三次函数的二次函数或三次函数)(zMz则则 ,得:,得:0 zM一般情况是这样:一般情况是这样:如
31、果如果 集中外扭矩情况,为常数集中外扭矩情况,为常数 为均匀分布扭矩,为均匀分布扭矩,为一次函数为一次函数 为线性分布,为线性分布,为二次函数为二次函数dzdMmz0mzMmmzMzzmmzMzM)563()()()4()4(zz截面截面 处的扭矩:处的扭矩:(均匀扭矩)(均匀扭矩)(线性扭矩)(线性扭矩)mzmdzMzz0221mzz)(z)(z(如前所述表示翘曲程度的函数(如前所述表示翘曲程度的函数 与扭率与扭率 只差一个只差一个常系数,截面约束系数)常系数,截面约束系数)将其代入(将其代入(3-49)式得:)式得:)573()()(1)4(mzGIzEId写成:写成:EImzkz)()(
32、2)4(式中:式中:EIGIkd2此为四阶常系数微分方程此为四阶常系数微分方程称为约束扭转的弯扭特性系数称为约束扭转的弯扭特性系数23;.如为常数,既箱梁沿纵向受均匀分布外扭矩,则全解为:如为常数,既箱梁沿纵向受均匀分布外扭矩,则全解为:2)(224321zIkmshkzCchkzCZCCz或:或:2)(24321zGImshkzCchkzCZCCzd如如 ,既箱梁仅受集中外扭矩,则其通解为:,既箱梁仅受集中外扭矩,则其通解为:0m)603()(4321chkzCshkzCZCCz为此:为此:)()(432shkzCchkzCkCz)()(432chkzCshkzCkz)()(433shkzC
33、chkzCkz (3-61)由式(由式(3-49)得:)得:)()()4(zIEzGIdzdMmdz 则:则:MMzEIzGIMkdz )()(:kM)(zGIMdz 自由扭转扭矩,自由扭转扭矩,与(与(3-4)式相同)式相同:M约束扭转(弯曲扭矩)扭矩,既弯扭力矩约束扭转(弯曲扭矩)扭矩,既弯扭力矩24;.由式(由式(3-56)和式()和式(3-36知:知:)()(zEIzEIM :B约束扭转双力矩约束扭转双力矩由式(由式(3-29)知:)知:)()(zEIzEIB 将式(将式(3-61)代入得:)代入得:)643()()()()653()()(24343432CGIzEIzGIMshkzC
34、chkzCkGIdzdBMchkzCshkzCGIBshkzCchkzCkCGIMddzdddk,BMMk、B 均为截面内力,均为截面内力,为自平衡内力,利用初参数法求得:为自平衡内力,利用初参数法求得:0z令在令在 处:处:00000000MMBBzzzzz分别代入以上各式得四个方程,联立求解得:分别代入以上各式得四个方程,联立求解得:ddddGIBCGIMkCGIMCGIBC0400302001)(125;.代入(代入(3-60):):)663()()1()(000shkzkzkGIMchkzGIBkshkzzdd 此为约束扭转的初参数方程,若知道边界条件直接代入可求得此为约束扭转的初参数
35、方程,若知道边界条件直接代入可求得 ,利用(,利用(3-56)可求得可求得 ,由式(,由式(3-29),(),(3-30)求得约束扭转正应力,由式()求得约束扭转正应力,由式(3-37)求约束扭转)求约束扭转剪应力。剪应力。)(z)(z0su铰接:铰接:00z00B 可自由翘曲,无与横截面垂直的可自由翘曲,无与横截面垂直的荷载,由(荷载,由(3-63)知知)(zEIB 00 无扭转(阻止杆端的截面绕无扭转(阻止杆端的截面绕 轴转动)轴转动)如何根据支座情况,确定边界条件:如何根据支座情况,确定边界条件:自由端自由端:00B固定端:固定端:00无扭转无扭转00)(zhsu截面无翘曲截面无翘曲00(式(式(3-15)固定端固定端 ,则,则 )0M 由式(由式(3-36)0)(zEIM知:知:00 z已知、zMB00?0000zMB?0?0000zMB?0?0000zMBz26;.27;.
- 温馨提示:
1: 本站所有资源如无特殊说明,都需要本地电脑安装OFFICE2007和PDF阅读器。图纸软件为CAD,CAXA,PROE,UG,SolidWorks等.压缩文件请下载最新的WinRAR软件解压。
2: 本站的文档不包含任何第三方提供的附件图纸等,如果需要附件,请联系上传者。文件的所有权益归上传用户所有。
3.本站RAR压缩包中若带图纸,网页内容里面会有图纸预览,若没有图纸预览就没有图纸。
4. 未经权益所有人同意不得将文件中的内容挪作商业或盈利用途。
5. 装配图网仅提供信息存储空间,仅对用户上传内容的表现方式做保护处理,对用户上传分享的文档内容本身不做任何修改或编辑,并不能对任何下载内容负责。
6. 下载文件中如有侵权或不适当内容,请与我们联系,我们立即纠正。
7. 本站不保证下载资源的准确性、安全性和完整性, 同时也不承担用户因使用这些下载资源对自己和他人造成任何形式的伤害或损失。
