 水下机器人比赛经费申请
水下机器人比赛经费申请

《水下机器人比赛经费申请》由会员分享,可在线阅读,更多相关《水下机器人比赛经费申请(12页珍藏版)》请在装配图网上搜索。
1、水下机器人比赛经费一、竞赛背景1.该比赛的目的8月26日,我国自行设计、自主集成研制的“蛟龙号”载人潜水器在南中国海3000米级海上试验取得成功。此次“蛟龙号”最大下潜深度达到3759米,超过全球海洋平均深度3682米,并创造出水下和海底作业9小时零3分的纪录。这一重大成果的取得实现了我国深海装备技术的跨越式发展,标志着我国继美、法、俄、日之后成为第五个掌握3500米以上大深度载人深潜技术的国家。水下机器人(ROV)大赛为提高同学们对海洋的兴趣而设立,通过此赛事可以提高同学们对海洋开发领域的专业认识,并且将提高学生的团队协作、批判性思考、分析问题、解决问题的能力等。该赛事的主题每年都有所变化,
2、主要是针对海洋开发中的最新进展或所遇到的实际问题等,意图是为了提高同学们对海洋开发的认识,增进高校之间的技术交流,推动我国水下机器人技术发展。2.参赛队伍 参赛队伍主要由国内知名高校组成。也有一些初中及高中学校参加该项比赛的中学组竞赛。参赛的大学都是国内的名校,如北京大学、上海交通大学、华中科技大学、大连理工大学、哈尔滨工业大学、西北工业大学等。这些学校都是国内顶尖的大学,与这些学校较量,才可体现我校在水下机器人领域的实力。同时,参加中学组比赛的都是我国各省的重点中学,在该比赛中获胜将会大大的提高我校的声誉。二、比赛任务本次比赛主题为我国科研人员进行南海科学考察时,通过水下机器人ROV对海底水
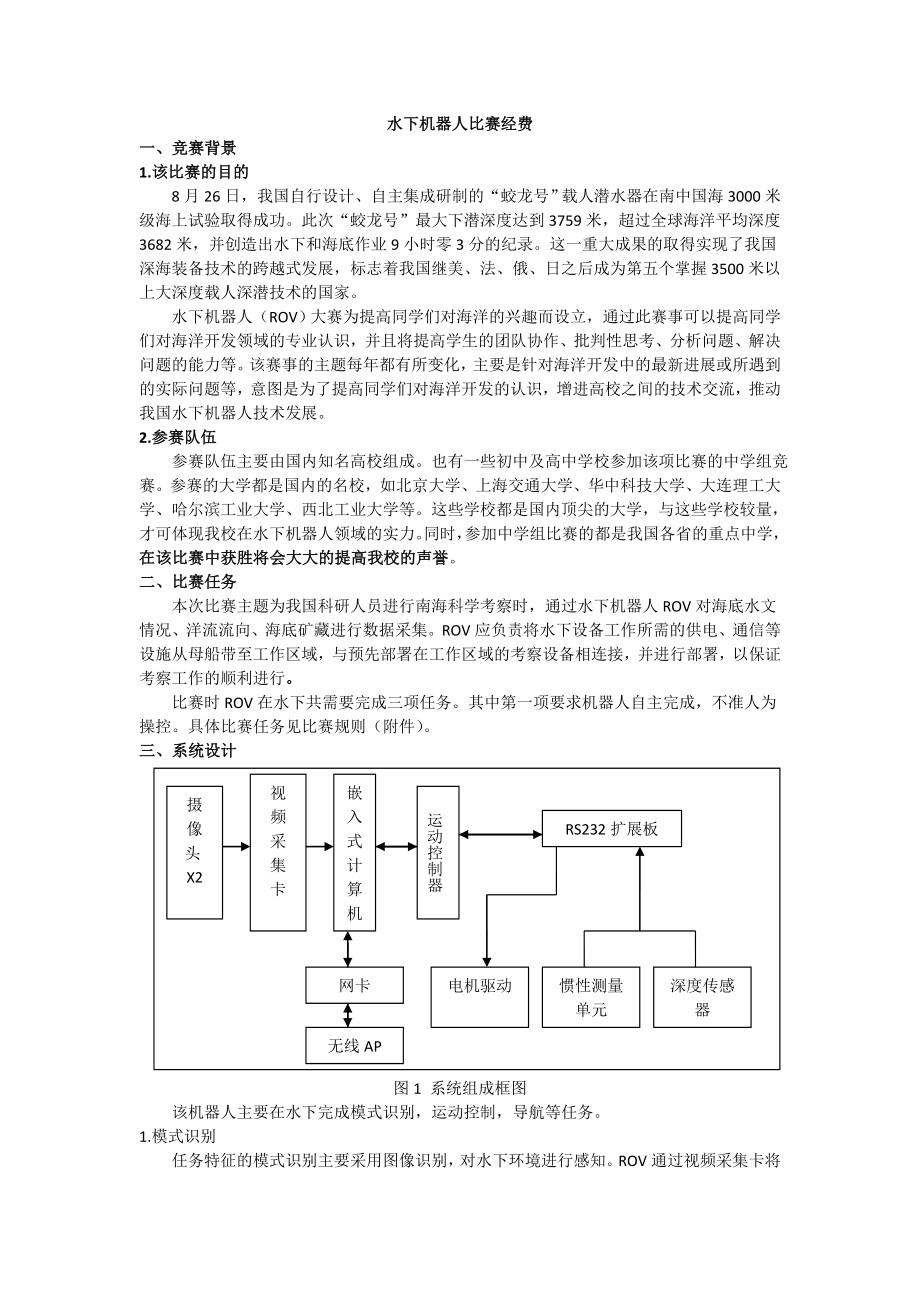
3、文情况、洋流流向、海底矿藏进行数据采集。ROV应负责将水下设备工作所需的供电、通信等设施从母船带至工作区域,与预先部署在工作区域的考察设备相连接,并进行部署,以保证考察工作的顺利进行。比赛时ROV在水下共需要完成三项任务。其中第一项要求机器人自主完成,不准人为操控。具体比赛任务见比赛规则(附件)。RS232扩展板无线AP网卡摄像头X2运动控制器三、系统设计视频采集卡嵌入式计算机深度传感器惯性测量单元电机驱动图1 系统组成框图该机器人主要在水下完成模式识别,运动控制,导航等任务。1.模式识别任务特征的模式识别主要采用图像识别,对水下环境进行感知。ROV通过视频采集卡将高清摄像机采集到的数字图像传
4、回嵌入式计算机进行处理,对目标的定位以及目标特征的辨识。2.运动控制融合传感器信息,对机器人的姿态进行实时调整,使机器人完成嵌入式计算机对机器人规划的路径。该运动控制器主控芯片是一款基于ARM最新的COTEX-M3核心STM32F103,实时完成机器人水中定位、姿态控制、定深运动等。3.导航定位通过机器人上的惯性测量单元对机器人的位置进行一定的推算,是机器人了解自身在池中的大概位置。4.ROV系统该系统是通过一条通向水面的脐带缆连接一个无线AP来与地面端通讯。对机器人的运动情况进行监控,并对机器人进行要操作。四、ROV经费预算清单编号项目型号单价(元)数量总价(元)途径1PC104计算机嵌入之
5、星600016000购买2惯性姿态测量单元MTI10000110000购买3电子罗盘HMC3000200012000购买4可光学变焦摄像头电动变焦镜头22倍480线5001500购买5视频采集卡HB180046821682购买6深度传感器XLH-LHY6337001700购买7水下推进器60063600自研8机体设计制造450014500自研9电源300W5001500购买10浮力电缆10020200011风险余度(10%)3349元合计33490元注:该预算为制作1台ROV的经费预算。充气水池采购价格:8000元八、过去研究成果在过去我们在水下机器人方面做了大量的工作。1、1200米水下推进
6、器图8 水下推进器 该电机已经在我校海洋技术研究中心进行打压试验,验证其在水下1200米可稳定工作。2、探路者I图9 探路者I该型水下机器人已在静泊湖完成湖试。3、探路着II图10 探路者II该机器人获得国家嵌入式系统设计大赛三等奖4、MINI探路者II图11 MINI探路者II该型号水下机器人已在松花江完成湖试。5、水底采矿机器人图12 水底采矿机器人 我们研制了3台该类型机器人,自2008年连续三年在ROBOCUP水下采矿机器人比赛中获得冠军。6、声纳图像处理在过去我团队完成海军声纳图像处理相关课题。7、水下图像处理图13 对游泳池中黑线的识别附录水下机器人大赛比赛规则8月26日,我国自行
7、设计、自主集成研制的“蛟龙号”载人潜水器在南中国海3000米级海上试验取得成功。此次“蛟龙号”最大下潜深度达到3759米,超过全球海洋平均深度3682米,并创造出水下和海底作业9小时零3分的纪录。这一重大成果的取得实现了我国深海装备技术的跨越式发展,标志着我国继美、法、俄、日之后成为第五个掌握3500米以上大深度载人深潜技术的国家。深海漆黑一片,“蛟龙号”必须保持与母船通信才能安全下潜。在深海中,无线电无法使用,水声通信是远距离数据传输的惟一方法。我国研究人员克服重重困难才解决通信联络问题,使“蛟龙号”具有先进的水声通信能力,可以高速传输数据、图像和语音。水下机器人(ROV)大赛为提高同学们对
8、海洋的兴趣而设立,通过此赛事可以提高同学们对海洋开发领域的专业认识,并且将提高学生的团队协作、批判性思考、分析问题、解决问题的能力等。该赛事的主题每年都有所变化,主要是针对海洋开发中的最新进展或所遇到的实际问题等,意图是为了提高同学们对海洋开发的认识。本次比赛主题为我国科研人员进行南海科学考察时,通过水下机器人ROV对海底水文情况、洋流流向、海底矿藏进行数据采集。ROV应负责将水下设备工作所需的供电、通信等设施从母船带至工作区域,与预先部署在工作区域的考察设备相连接,并进行部署,以保证考察工作的顺利进行。一比赛组成本次竞赛由水下任务作业和静态展示两大部分构成。组委会要求所有参赛队参加作品静态展
9、示,与其他参赛队和观众进行技术交流。本次大赛的主要目的是促进各高校之间的交流学习,共同为提高我国水下机器人技术发展努力。1水下任务作业 水下作业任务共三项,详见水下“水下任务描述”。2静态展示各参赛队须向评审专家组和观众展示水下机器人与全部设备,参赛队员向评审专家组和观众介绍水下机器人,展现队伍精神面貌。二参赛对象凡竞赛前在校就读的大中学生(包括本科、大专、初高中)均可参加。学生自愿组合,三至六人一组,以初高中组、大专本科组分组,不可跨类别组队。大赛采用全国统一报名。三水下机器人技术指标要求1机器人数量:最多2台(要求自制,不得使用履带行走,以免破坏比赛场地地貌)2机器人重量:不超过10公斤(
10、脐带重量不计算在内)3推进器马达数量:不限(防水外壳要求自制或改造)4控制器:控制方法不限(自制或改造)5控制器操作:人数最多4名6传输方法:脐带(带线)式电缆传输(长度不限)7脐带操作人员:人数最多2名8摄像头及数量:不限(防水外壳要求自制或改造)9显示器数量:不限10传感器数量:不限四水下任务描述任务一:竞赛场地距水底高60cm设置红、黄、绿三个目标物,三个目标物成一条直线放置,间距为60cm。机器人在水池一侧下水后自主寻找目标物,并向目标物行进,撞击指定颜色目标物。该任务需自主完成,也可手动完成。自主完成的参赛队会获得该项任务的分数奖励。任务二: 大赛工作人员预先利用“电梯”,将水听器和
11、线缆插头运送到水底。参赛队员操控ROV取下栓子,从电梯上释放水听器并将其放置到指定的0.5mx0.5m的正方区域中。然后打开海底探测仪器连接箱对应的接口并将线缆插头插入接口,接口分大、中、小三种型号,根据难度不同分数不同。 具体任务包括:1. 移除栓子,从电梯上释放水听器2. 将水听器取下3. 安装水听器到对应的0.5mx0.5m的正方区域4. 移除水听器接口箱的上盖5. 从电梯上取下电力/通讯插头6. 将电缆插头插入到海底探测仪器的接口上(注:在比赛开始前可选择插孔大小,不同插孔尺寸在完成该任务加分不同) 电梯 栓子 插着栓子的平台 水听器和插头 插着栓子的水听器 插头 电梯上的水听器和插头
12、 水听器安装区域 取下上盖的海底探测仪器 (该图为中型插孔) 插上插头的海底探测仪器任务三: 我国的海岸线有一万八千多公里长,而且面临太平洋,大洋海底蕴藏着无穷的矿产资源,而海底矿产除了含丰富的锰、铁外,更有稀有的钴、镍、钾、镁、铝、金等元素。本任务要求参赛队操作ROV寻找海底矿石标本,并采集3块矿石标本送到电梯上。矿石标本由尺寸20mm到50mm不规则形状的小石块代替,随机分布在水底。五比赛场地在我国南海,科学考察船上的科学家为了监测海底水文情况、洋流流向、海底矿藏等信息,派出水下机器人(ROV)代替人进行工作,ROV潜入海后自动搜寻预先部署在海底的工作站,对工作设备进行部署,保证所有设备可
13、正常工作,并取得标本后自行返回水面。本次大赛场地模拟海底环境。比赛场地大体为7m3m大小的充气或支架泳池,水深1.3米。如图所示框架结构泳池泳池没布局如下图所示目标物ROV释放区电梯矿石海底探测仪器水听器安装处目标物场地布局图(示意图)六评分细则任务一:(50分) 手动撞击到错误目标物或者没有撞到目标物0分手动撞击到正确目标物5分自主撞击到错误目标物20分自主撞击到正确目标物50分任务二:(180分,完成每项获得相应分数)1. 去除栓子释放水听器30分2. 移除水听器使得其不在与电梯接触10分3. 安装水听器到0.5mx0.5m方形区域30分4. 去掉相应海底探测仪器连接箱上盖30分5. 取得
14、连接插头30分6. 将插头插入相应接口 插入大型插口10分 插入中型插口30分 插入小型插口50分任务三:(30分)每采集到一块锰球并将其送到电梯上获得10分 时间加分: 完成全部任务所用时间少于15分钟的,每分钟加6分,不足一分钟的每秒加0.1分 ROV重量得分: 参赛ROV重量小于8kg的参赛队在总分中加40分,超过10kg的参赛队在总分中减20分。注:每支参赛队进行两轮比赛,去两轮比赛最好成绩位最终成绩七竞赛流程及规则1、练习参赛队报到后可根据报到先后顺序自由进行适应场地练习。2、正式比赛(1)非比赛队员不得参与比赛。(2)每队进行比赛的顺序是在该天比赛开始前由抽签决定。(3)每支参赛队
15、伍有5分钟的准备时间,15分钟的比赛时间,最后有5分钟退场时间。竞赛时间的长短将根据参赛队伍的数量适当更改。(4)参赛队有 5分钟时间准备好ROV及设备,并要将机器人放在指定位置。(5)比赛开始号声一响,参赛队将ROV放入水中, ROV自动寻找目标物并撞击指定颜色目标物,随即开始手动完成比赛任务。手动进行比赛任务时,操控员看着面前显示器来控制ROV,脐带电缆操作员可站在池边调整电缆,但不得操控电缆干预机器人正常操作,每次犯规会被扣10分。(机器人控制人员要背向水池,不可以直接目视或由别人提示控制机器人)(6)5分钟的离场时间在15分钟任务时间一结束就开始计时,不论ROV在哪里或何种状态。(7)
16、计时工作只会在所有4个作业均成功完成,ROV返回释放区水面,一个队员在释放区与其物理接触时停止。(8)15分钟比赛任务进行期间,竞赛中如机器人有损坏或需要调整,参赛队可以按需要进行维护、上岸调整而不会被扣分,但计时仍会继续进行,除非裁判认为出现的问题参赛队已经无法控制。(9)每队队长负责领导全队赛事、对外联络和对外演示,并对本队比赛负责。(10)参加比赛就有损坏ROV的可能,对此组委会不负责任。若出于安全考虑,在有必要推迟比赛时,组委会有权在任何时间推迟或终止比赛。(11)由参赛队员造成的ROV在裁判员开始命令前下水的,ROV重新从水面下水,所花费的时间计入总时间,重新下水前所得分数作废。(1
17、2)ROV完成任务后应依靠自身动力返回,上浮直至与参赛队员物理触碰,参赛队员不应将手伸至水面以下,除非裁判特许。(13)ROV完成任务期间的任何时刻队长都可以宣布任务结束并要求收回ROV。(14)如果ROV遭受到主办场地的设备、线缆或者其他潜水设备的影响,队长此时可以要求计时结束,ROV可返回码头,同时裁判将估算此情况下所导致的时间浪费,并将其算入比赛时间里。如果队长没有在合适的时间段内提出这个要求,那么此机会将丧失。不过,因场地灯光或者目标物等的冲突不合此项要求。(15)比赛在以下几种方式中结束:1)、任务完成2)、任务时间结束3)、裁判命令任务结束4)、队长要求任务结束5)、ROV有不合规
18、定的动作,如非法碰触水面等,由裁判决定。八静态展示1、每个参加比赛的ROV都须进行静态展示 2、静态展示时,每支队伍将面向裁判、观众、媒体等,与他们直接交流。 3、组委会强烈推荐每队制作PPT、海报等宣传材料进行宣传 4、静态展示期间每队应至少派一名队员进行讲解。 5、组委会欢迎各大媒体就感兴趣的队伍进行采访。九奖项设置 冠亚季军各一支团队一等奖:10%二等奖:30%三等奖:60%十其他1、每支队伍可带2个ROV参赛。裁判将对ROV进行物理检查,并有权终止不合规定或有危险趋势的ROV的参赛资格。2、裁判将就参赛队的ROV与参赛队员交换意见,任何会有问题的ROV将被取消资格。主办方不对任何对RO
19、V造成的伤害负责,也不对由其他ROV造成的伤害负责。3、每个ROV潜水期间只能接受岸上操控队员的指令。执行任务时不能与其他人或其他机器通讯。接受返回指令后必须倚靠自身能力与自身资源返回工作台。4、ROV的重量应小于允许规格的最大值,小于最大重量的可获得加分,大于最大重量的将减分,具体规则请参考评分细则。整个机器在压缩应能放入1.83mX0.91mX0.9m的箱子里5、ROV工作时最大电流不超过15A(电源正极串联15A保险丝)。6、除用来去除任务要求投放的物品和压缩空气外,ROV不能把任何物体弃入水中7、所有ROV需配有急停开关及空气开关。8、不允许没有急停开关的ROV下水。9、若出于安全考虑需要停止比赛时,主办方有权暂停或终止比赛。
- 温馨提示:
1: 本站所有资源如无特殊说明,都需要本地电脑安装OFFICE2007和PDF阅读器。图纸软件为CAD,CAXA,PROE,UG,SolidWorks等.压缩文件请下载最新的WinRAR软件解压。
2: 本站的文档不包含任何第三方提供的附件图纸等,如果需要附件,请联系上传者。文件的所有权益归上传用户所有。
3.本站RAR压缩包中若带图纸,网页内容里面会有图纸预览,若没有图纸预览就没有图纸。
4. 未经权益所有人同意不得将文件中的内容挪作商业或盈利用途。
5. 装配图网仅提供信息存储空间,仅对用户上传内容的表现方式做保护处理,对用户上传分享的文档内容本身不做任何修改或编辑,并不能对任何下载内容负责。
6. 下载文件中如有侵权或不适当内容,请与我们联系,我们立即纠正。
7. 本站不保证下载资源的准确性、安全性和完整性, 同时也不承担用户因使用这些下载资源对自己和他人造成任何形式的伤害或损失。
