 自动控制理论问题详解
自动控制理论问题详解

《自动控制理论问题详解》由会员分享,可在线阅读,更多相关《自动控制理论问题详解(34页珍藏版)》请在装配图网上搜索。
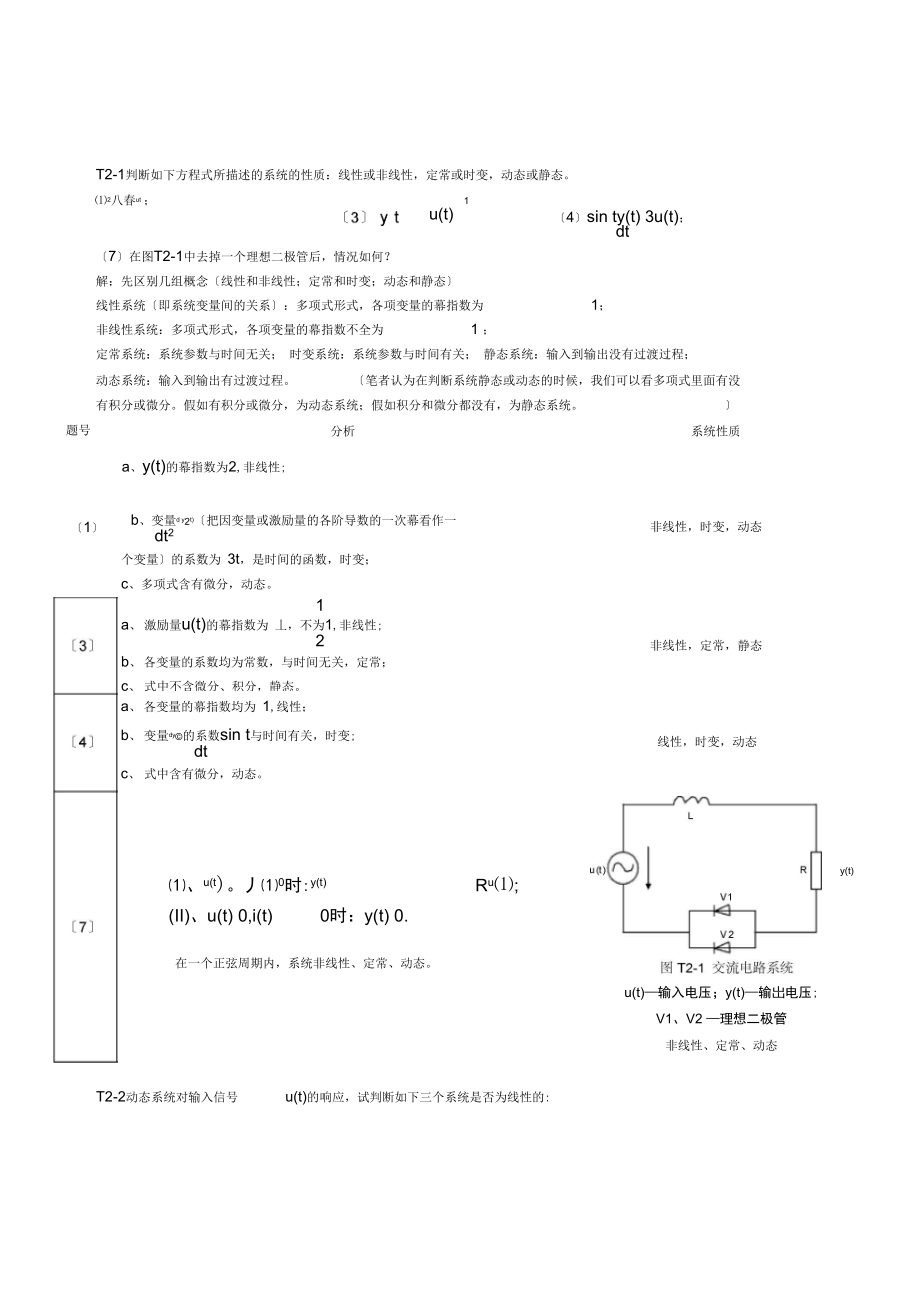
1、T2-1判断如下方程式所描述的系统的性质:线性或非线性,定常或时变,动态或静态。2八春ut ;1u(t) 2 ;4sin ty(t) 3u(t);dt7在图T2-1中去掉一个理想二极管后,情况如何?解:先区别几组概念线性和非线性;定常和时变;动态和静态线性系统即系统变量间的关系:多项式形式,各项变量的幕指数为1;非线性系统:多项式形式,各项变量的幕指数不全为1 ;定常系统:系统参数与时间无关; 时变系统:系统参数与时间有关; 静态系统:输入到输出没有过渡过程;动态系统:输入到输出有过渡过程。笔者认为在判断系统静态或动态的时候,我们可以看多项式里面有没有积分或微分。假如有积分或微分,为动态系统;
2、假如积分和微分都没有,为静态系统。系统性质分析题号a、y(t)的幕指数为2,非线性;1非线性,时变,动态b、变量d y2t)把因变量或激励量的各阶导数的一次幕看作一dt2个变量的系数为 3t,是时间的函数,时变;c、多项式含有微分,动态。1a、激励量u(t)的幕指数为 丄,不为1,非线性;2b、各变量的系数均为常数,与时间无关,定常;c、式中不含微分、积分,静态。a、各变量的幕指数均为 1,线性;b、变量dy的系数sin t与时间有关,时变;dtc、式中含有微分,动态。、u(t)。丿0时:y(t)Ru;(II)、u(t) 0,i(t)0时:y(t) 0.在一个正弦周期内,系统非线性、定常、动态
3、。非线性,定常,静态线性,时变,动态y(t)u(t)输入电压;y(t)输岀电压;V1、V2 理想二极管非线性、定常、动态T2-2动态系统对输入信号u(t)的响应,试判断如下三个系统是否为线性的:t1y(t) x2 0 u( )d ;0t2y(t) 3x 0 u( )d ;0t3y(t) e tx 0 e t u( )d。0解:先分清x 0和u t这两个量:x 0为状态变量初始状态或初始条件;u t为输入变量。零状态线性和零输入线性的判定方法:(I) 当x 0 0时,为零状态,对应的输出称为零状态响应,此时看输出yt与输入u t的关系是否满足线性,假如满足,如此为零状态线性;(II) 当u t0
4、时,为零输入,对应的输出称为零输入响应,此时看输出yt与初始状态x 0的关系是否满足线性,假如满足,如此为零输入线性;(III) 当I、(II)都满足时,就既满足零状态线性又满足零输入线性。题号分析系统性质ia、当x 00时,为零状态,此时输出y t与输入u t满足线性关系,故满足零状态线性;b、 当u to 0时,为零输入,此时输出 yt与初始状态x0不满足线性关系,故不满足零输入线性;综上a b知,系统仅满足零状态线性。仅满足零状态线性2分析方法同1既满足零状态线性又满足零输入线性3分析方法同1既满足零状态线性又满足零输入线性T2-3有一线性动态系统,分别用 t 0时的输入5 t ,u2
5、t ,u3 t ,t 0,对其进展试验。它们的初始状态 都一样,且x 00,三种试验中所得输出假如为yi t , y2 t , y3 t o试问如下预测是否正确:门若比ui(t)上,则y3(t)yi(t)y2(t);2若比 厲/上,则y3(t)yi(t)/y2(t);3若ui(t)2比壮),则yi(t)2y2(t);4若ui(t)上,则yi(t) y2(t)。如果x 00,哪些预测是正确的?t解:因为系统为线性动态系统,所以不妨设:y(t) x 0 u( )d0x 0所处情况题号分析结果采用叠加原理,y3(t)x 0t出()dU3(t) U1 (t) U2(t)tx 0U1( ) U2( )d
6、100不正确2x 0tU1()U2( )dydt)y2 (t),(只因为x 0的存在)x 000A U0,此时:2系统线性系统同时满足可加性和齐次性;商运算不在其中,故不正确。不正确y(t) x0tu( )dy2(t)x 0tU2( )dU2(t) 2U1(t)x0t25( )d030t0不正确2x 025( )d02ydt),-(只因为x0的存在)4y2(t)x 0t上()d0U2 (t) W (t)x 0tU1( )dyjt),恒等。0正确1与上一种情况比拟正确x 00,此时2同上一种情况不正确t3与上一种情况比拟正确y(t)u( )d04恒等式正确T2-8线性动态系统的状态方程为1 0
7、0 0?x 010 x 0 u0 1 2 1Ox; x(0)01试求由单位阶跃u 1(t)输入所引起的响应y(t)。解:依题意,该线性系统的各系数矩阵为10000A 010 ; b0 ; c 110 ; x 01 ;01210s 100s 100(siA)0s 10;det(slA)0s 10s 1 2s2 ;0 1s 201s 2(s1)(s 2)0T0(s1)(s2)00adj (sI A)0(s1)(s2)(s1)0(s 1)(s2)0 ;00(s1)20(s 1)(s 1)210 0s 11 adj(slA)1(si A)00 ;det(slA)s 11 110s 2 s 1s 2查拉
8、氏Laplace丨变换表得:t e000t e0 ;其中02tt2teee1L为拉氏反变换的函数符号状态转移矩阵1t L 1 (sI A)ty(t) c (t)x(0)0c (t )bu( )dtt e000t10t e0001 10 0t e0110 0t e00 1( )dt02tte e2t e002(t)tee川 ) e1补充:如何求n阶矩阵的伴随矩阵?第一步:先找出该n阶矩阵中每一元素在其 行列式中所对应的代数 余子式Aij;第二步:将得到的代数余子式Aij取代其对应元素所在的位置并写成矩阵的形式,并将此矩阵命名为新矩阵;第三步:将新矩阵转置 即得所求伴随矩阵。如何计算Aj:A -1
9、ijM(i为该元素所在的行数,j为该元素所在的列数);其中Mj为元素的余子式,即在 该n阶矩阵的行列式中,划 去所取的任一元素所在 的行和列之后, 剩下的(n 1)阶行列式的值。以本题为例,同学们检 验一下,看看自己是否 已掌握了伴随矩阵的求 法。T2-11线性动态系统中0A 03试求系统的传递函数 G(s)。10001 ,B0,C23002101 ;s 23;解:依题意:s 1(sI A) 0 s302det(sI A) s s 2s(s2)33s Tadj(sI A)(s2)s(s 2)31s2 ss(s 2) (s 2)3s(s 2)1所求传递函s;数G(s)30dj(sldet(slA
10、)2 ss(s 2) (s2)102 303s(s2)s03s32 s1s2 s 233s 232s 2s3.T2-13系统的传递函数为G(s)s a32s 7s 14s 8求当a等于何值,系统传递函数将是不完全表征的。G(s)解:依题意:32s 7s 14s 8G丫1G丫2Gic; G2cUU图T3-1单输入系统方框图系统特征多项式:sdet(sl A) s3 7s214s 8 (s 1)(s2)(s 4);系统疋二阶的:n3;当 a 1or 2or4 时,传递函数的特征多项式s为二阶的:且n2 n 3此时系统有零、极点对消,系统传递函数是不完全表征的。T3-1对图T3-1所示系统,按传递函
11、数方框图变换原如此求出如下传递函数:解:解题之前,先总结一些方框图的变换规如此:、相加点对方框G:反(逆)移支路前(顺)移支路 G、分支点对对方框反(逆)移支路前(顺)移支路、方框串联相乘,方框并联代数相加; 、单环负反馈:Gc 、注意:相加点、分J (详细介绍请查阅课本第 39页);1 GH支点之间不能交叉,也不能相互合并(为避免出现不必要的 错误而人为规定的)因为原系统简化方式有很多,所以笔者就不一一列举了,下面是笔者的一种解法,请参考。 依题意,将原传递函数方框图简化为如下图中的形式:GicYiG2cY2Y2G1G2G3G4G1G2G3G4G-|G2G3G4Y11U G4H4G1G2H2
12、G1G4G4Hi)G1G2G1 G3G4H4G2G3H3G1G2G3 H 2 G1G2G3G4 H11 G3G4H 4 G2G3H 3 G1G2G3 H 2 G1G2G3G4 H1T3-3求出图T3-3所示四输入系统方框图的输入量Y的表达式。图T3-3四输入量的系统方框图解:依题意,将原四输入量的系统方框图简化为如下图中的形式:G1G21 G1G2 佇 H1) GG1R3H1)G2(G1 R-iR2 G1H1 R3 R4)1 G2H 2 G1G2H1T3-4(b) 个电网络如图T3-4(b)所示。试指出图中最多可划分为几个无负载效应的环节,求出该图的传递函数:G(s)Uo sUi s并说明负载
13、效应对传递函数的影响。解:先介绍几个概念:负载效应:信号传递过 无负载效应的环节:环 而与环节外部所接负载 隔离放大器的作用:可程的分流效应与损耗。 节的输出变量仅决定于 无关。消除环节间的负载效应输入变量及环节自身的 结构与参数,OEZ 隔离A1U1二 G放大器A?u1 FK 1F0O 一RiR20(b)依题意,图(b)中最多可划分为3个无负载效应的环节:G(s)Uo sUi ssG1sC2Ri1_sC|R2sC2T3-5(b) 一个无源网络如图T3-5(b)所示,试求传递函数:G(s)K(1 sCi Ri)(1 SC2R2)Uo sUi s解:依题意,图(b)的传递函数:L CO_2八I
14、-U1o(b)R uIG(s)U0 sUi sRR sL丄sCsCR1 sCR s2CLT3-10试根据图T3-10所示传递函数方框图画出对应的信号流图,并根据信号流图求出如下各个传递函数:Ga(S)Y sRs ;Gb(s)Gc(s)图T3-10传递函数方框图解:a先明确E s表示的意思。E s表示误差信号,是输入信号与反应信号的差值。b学会画信号流图。两节点之间掌握信号流图的表示方法: 在信号流图中只采用两种图形符号,即节点与节点之间的定向线段的定向线段又叫支路。其中,节点代表变量;支路表示信号的传递;支路上所标示的文字代表传递函数。根据传递函数方框图画出对应的信号流图的方法:n,再加1(考
15、虑1、先确定节点的个数:数出传递函数方框图题中给出的图中相加点数和分支点数的总和信号输入处有一个节点),即信号流图的节点数 N=(n+1);此时就可以画出从输入到输出的一条通路。2、根据传递函数方框图上的传递函数以与信号传递方向在该通路的基准上正确表示出来。以此题为例确定节点数:N=3(相加点)+3分支点+仁7个 画出从输入到输出的一条通路:Rs .:.-.一-;一.一 Y s将传递函数以与信号传递方向在该通路上表示出来Y s根据我们所画的信号流图知,从 Rs到Y s只有一条通路:R Gi ;LiGH1;环路共有三个,它们的环路传输分别为:l2 G;L3H2.三个环路中,只有Li与L3不相互接
16、触,特征式:1 (LiL2L3)L1L3;1.Ga sG11G1H1G1H2G1H1H 2Gb SE sR sR1 11 H 21 G1H1G1 H2 G1H1HY sY sR sG1Gc sE sE s1 h2R s系统从Rs到E s只有一条通路: R 1 ;,1 L3 ;T3-11(b)有一个信号解:依题意,信号流图中从 U到Y共有两条通路: R G1G2G3 ; P2 G4环路共有三个,它们的环路传输分别为:L1 G1G2H1 ;L2G2H 1;G2G3HL2L3);三个环路间彼此相互接触,特征式:1 1;G1G2 H1 G2 h 1R 1 P2 2G1G2G3G4 (1G2G3H 2
17、)1 G1G2H1 G2H1G2G3 hT3-12某控制系统从源点到汇点的总传输为Y ah 1 cf dq U 1 be 1 dq cf其中a、b、c、d、e、f及q各代表一个支路的传输,试绘制出该系统的信号流图。Y解:依题意, Uah 1 cf dq1 be 1 dq cfah 1 cf dq R ,1 dq cf be be dq绘出该系统的信号流图如下:画出该系统的状T3-13系统方框图如图T3-13所示。试写出XX2、X2为状态变量的状态方程与输出方程, 态变量模拟图。图T3-13 系统方框图解:依题意,画出该系统的状态变量模拟图如下:Y(s)sX,s)X2(s)系统的状态方程:sX2
18、 (s)2X2(s) X3(s)sX3(s)KXi(s) X3(s) KR(s)0?1 0X10写成矩阵形式:X02 1X20 rK0 1X3KX1输出方程:y &100 x2X3T3-15控制系统的传递函数G(s)s* 2 2s 53s3 6 s2 9s 15试求该系统的可控标准形实现与可观测标准形实现。解:对传递函数略加变换:(1)、可控标准实现:1U25xAcxbcuy CcxbeCc(2卜可观测标准实现:AxC0xbou0 0式中:A。100 155 33 ; b02 3 ; C000121 3T4-2二阶系统的传递函数为随着参数n的不同,其一对极点在s平面上有如图T4-2所示的6种分
19、布。假如系统输入单位阶跃信号,试列出与这 6对极点相对应的暂态响应曲线的形状特征。解:首先明确阻尼比在不同取值X围下,暂态响应曲线的是怎样变化的:阻尼比取值X围1过阻尼1临界阻尼0 1欠阻尼0无阻尼1 01暂态响应曲线变化情况单调衰减单调衰减振荡衰减等幅振荡振荡发散单调发散闭环极点位置位于左半实 轴线上的2个不相等的实 极点位于左半 实轴线上 的重极点位于不含虚 轴的左半s 平面上的2 个共轭复数极点位于虚轴 上的2个 共轭纯虚 数极点位于不含虚 轴的右半s 平面上的2 个共轭复数极点位于右半 实轴线上 的重极点极点分布图中所对应的暂态响应曲线的形状分别如如下图所示:P2 Pon过阻尼时的极点
20、分布和响应临界阻尼的极点分布响应解题之前先熟悉几个公式:、 2过调量:Mp e 1为阻尼比;、5%误差区的调整时间:ts 5%3为衰减时间常数,n为自然振汤频率;n、2%误差区的调整时间:ts2%44nn:AP2n. 12JjpnnHo-F20欠阻尼时的极点分布和应无阻尼时的极点分布和响应-p1oIIIIIP210时的极点分布和响应-1时的极点分布和响应T4-5设有一典型二阶系统丫(S)U(s)2nS22 nS为了使系统阶跃输入的响应有5%的过调量和2s的调整时间允许误差为5%,求阻尼比和自然振荡频率解:过调量:Mp e1依题意,由5%ln2 0.052ln2 0.050-695%误差区的调整
21、时间:ts 5%2s2.17rad / sT4-10 闭环系统的结构如图T4-10所示,假如开环传递函数G (s)与输入信号r(t)为110s(4s)10s(4s);10s(4s)r(t)Go(s)Go(s)r(t)Go(s)r(t)10t ;6t6t3t2 ;3t21.8t3。试求以上三种情况的稳态误差Y(s)R(s)图T4-10 单位反馈系统方框图解:求解之前,有必要记一下以下这X表对于此题这种题型,这应该是最快最准的解题方法了各种类型输入作用下的稳态误差e系统的型N单位阶跃输入R s 1 s积分因子数n=1积分因子:1s单位斜坡输入R s 4 s积分因子数n=2单位抛物线输入Rs 4 s
22、积分因子数n=301 11 K KK为比例因子注意观祭:N 0 n 1注意观祭:N 01 n 1注意观察:N 02 n 110注意观祭:N 10 n 1丄K注意观祭:N 1 n 1注意观祭:N 12 n 120注意观察:N 20 n 10注意观祭:N 21 n 11注意观祭:N 2 n 130注意观察:N 30 n 10注意观祭:N 31 n 10注意观察:N 32 n 1N30注意观祭:N n 10注意观祭:N n 10注意观祭:N n 1此表明确:系统的型N其中N为开环传递函数G0 s的积分因子数越高,稳态误差越小。记忆此表的方法请参考:对于输入函数满足丄tk拉氏变换k!时,令k 1 n,
23、由表易知:e1K(Nn -1)(Nn -1)0(Nn -1)以此题为例开环传递函数G0 (s)10s(4 s)10一4,系统为N1 s(1 -S)41型,比例因子K1042.5比例因子K怎么求:先把分子和分母中含有形如(ms k)的式子都化为(m s 1)的形式, k最后化得的开环传递函 数G0 s中的系数即为K.10104;eeK2.5、r t46t2拉氏变换R s4 663t_-2 ,s ss06ee1etettK;(3)、r t46t2“ 3拉氏变换R s46 6 10.83t1.8t234ss ss(1)、 r t10t拉氏变换R se010,sT4-12某具有扰动输入的反应控制系统如
24、图T4-12所示,如果其参考输入量和扰动量都是单位阶跃信号,r(t)d(t) 1(t)R(s)图T4-12具有扰动的单位反馈系统解:利用 Mason公式知:K11Y ss 1 s 3 R s -s 3-D s试求其频域响应 Y s、频域误差E s以与时域的稳态误差 e1K11K1s 1s 3s 1s3r(t) d(t)1(t),R sD s丄sK s1s(s1)(s3)KsE sR s1Y s -sK s1s(s1)(s3)Kslim sE ss 0题后小记s 1 s31 K -1Rs令S 1Y s为便于理解:Y ss 3Yr sK 1特此作出以下推导: 其中:Yd1匚 D s 1上丄 s 1
25、 s 3s ;.(叠加原理)Yr sK1s 1 s 3s ;.(Yr s表示的是Rs单独作用下,输出对输 入的响应)Yd S匕丄Rs 1 s 31尸 D s ;(Yd s表示的是D s单独作用下,输出对输 入的响应)1上 Ls 1 s 3T4-13某具有扰动输入的反应系统如图T4-13所示,设R(S) D(S) 1/S。系统中各环节传递函数为G(S)K0.05s 1G2(s)G3(s)2.51/S后,求系统的稳态误差与调差率;1/S后,求系统的稳态误差与调差率;要求:1求出系统的稳态误差与调差率;2在扰动点左侧的前馈通路中串入积分因子0.04,试画出补偿方框图。3在扰动点右侧的前馈通路中串入积
26、分因子 4在上列2的情况下,拟对扰动加装比例型补偿环节,以使调差率解:依题意,Y sYrsYd S -g! s G2 s-Rs -G2 sD sD 1G1s G2 s G3s1G1 s G2 sG3 s由图知:E sRsG3 sY s1Rg2 s G3 s-D ss1G1s G2 s G3s1 G1s G2 s G3s2.511s 5112.5Ks 12.5Ks(0.05s 1)(s 5)(0.05s 1)(s 5)(0.05s 1)(s 2.5)s(0.05s 1)(s 5) 2.5Ks(1)、elim sE ss 02.55 2.5KVdsYd sG2 sslimlimyRs 0 sYr
27、ss 0 G1 s G2 s1 1limlim s 0 Gi s s 0 K(0.05s 1)(2)、由图 T4 13(2)知:R(s)图T4-13具有扰动的反馈系统s2(0.05s1)( s 5)2.5Kslim sE s0;s 0VdsYd s limG2 slimyRs 0 sYr ss 01G1 s G2 ssE ses( 0.05s 1 )(s 2.5)sG1 s s0.s (0.05s 1)图T4-13(3)、由图 T4 13(3)知:(0.05s 1)( s2 5s 2.5)E s s2( 0.05s 1)( s 5) 2.5Kslim sE s1 .s 0K1G2sVdsYd
28、s limlim limyRs 0 sYr ss 0G1 s1G2 ss 0 G1 sslims 0(0.05s 1)图 T4-13 (3)(4)、由图 T4 13(4)知:yDslim叱s 0 sYR sK lim 一s 0G1 s G2 sG2 ssKlim 一s 0G1 s G2 s s-G1 s s 口sK0.04;K 0.04.R(s)图 T4-13 (4)T5-1系统的闭环传递函数为G(s)1011 s1r(t) sin(t 30 );2r(t) 2cos(2t 45 );3r(t) sin(t 30 ) 2cos(2t 45 )。当如下正弦信号作用于系统时,求系统的稳态响应:解:
29、依题意,频率特性: G j1011 j1011 j(1) 、G j ! 一i 0.9055.211 j 12.2将输入信号r t用正弦相量形式表示:R j | 1 1 (t 3090 )则系统稳态响应:yjljGjljRj0.905 (t 24.890 )用正弦函数形式表示:y t 0.905sin(t 24.8).、G j 210 上以 0.89410.311 j2 12.5将输入信号r t用正弦相量形式表示:R j | 2 2 (2t 45 )则系统稳态响应:yj|2Gj|2Rj|21.788 (2t 55.3 )用正弦函数形式表示:y t 1.788cos(2t 55.3 ).24.8
30、) 1.788cos(2t 55.3 ).、利用叠加原理以及(1)、(2)知:y t0.905sin(tT5-4(3)画出如下传递函数的频率特性Nyquist图:3G(s)250(1 s) ;2s (s 5)(s 15)解:依题意:积分因子数N=2,极点数(n)零点数(m)=4 1=3Gc(j50(1 j )分母有理化5)(j15)50 (75 19 2).250 ( 2 55)2 (252 )(2252) j (252 )(2252)三点成形:(1)、当0时,G。j0、当时,G。jKjb。250275 j01n mj(3)、与实轴交点:令Im Go j0,即a。2503550,考虑正频率(0
31、)特性:ReG。j7.42503 .2,55 7.4rad/s(75 19 7.42)7.42 (25 7.42)(225 7.42)0.23.绘出该传递函数的正频率特性知识点补充:(1) 、当0时,Go jO(2)、当 时,Go jT5-7某系统的开环幅频渐近特性如图 出其开环传传递函数。boa。(N(N0)0)(n(n其中K为比例因子;m),其中b0、a0分别为j 、jm)n的系数.:, 试写T5-7所示,开环传递函数中的零点、极点均位于左半复平面解:依题意,由图知:G s容易看出:10.5,10从点1,40到点5,0,纵轴的分贝幅值正好点1,40的幅值由比例因子K和积分因子1二者共同作用
32、,s50;1和一阶滞后因子s即:40 20lgK-20lg 解得:K 100 !点2,-12的幅值由比例因子K、积分因子即:12 20lgK-20lg 2-20lg,解得:1_ 501综上知:Go ss 1 s0.51s9.98降低40dB,横轴 刚好增加10倍频程。1 三者共同作用,1丄5129.98题后小结:(1) 、比例因子K 1的对数幅频特性:LmK 20lgK dB ;dB ;(2) 、积分因子1的对数幅频特性:Lm| J | Lm 20lg(3) 、一阶滞后因子 j的对数幅频渐近特性:LmG020lg T1T1TdB ;(4)、二阶滞后因子2T21J 2T1的对数幅频渐近特性:0L
33、mG40lg T1T1TdB.T5-8某系统的开环幅频渐近特性如图2传传递函数。T5-8所示,开环零点、极点均位于左半复平面上,试确定系统的开环图T5-8幅频渐近特性DDflk G解:依题意,由图知:G0 SS 10.00161s 10.21 s 0.88点0.0016,52的幅值由比例因子K和积分因子-二者共同作用,s即:52 20lg K-20lg0.0016,解得:K 102.6 0.0016 0.64;Go s10.64 1 s0.02111 s 1 s0.20.880.641 50ss1 625s 1 5s 1 1.14sT6-1试判断图T6-1 a、(b)所示两个系统的 BIBO稳
34、定性。(a)U(s)(b)图T6-1反馈系统方框图解:s s 121 -s s 1令s20得系统传递函数(b)Re 1,21s s 1s s 1的特征根:U s0,系统BIBO稳定;1,2-1 j.72令 s2-sd的特征根:U sRe 1,20,系统BIBO不稳定.0得系统传递函数1,2T6-9应用Routh判据确定如下特征方程的根中带正实部的根数、带零实部的根数与带负实部的根数14 s5s32s10 0 32s54 s6s33s2 s1 0 ;55 s4 s2s32s2 8s8 0。解:1s4 5s3 2s 100列出Routh阵列表如下:卜、列12341 s4101002 s352003
35、 s210004 s11270005 s010000第一列改变了两次符号,所以特征根中带正实部的根数为2个;带零实部的根数为 0个;带负实部的根数为2个。注意:s的最高次方为总根数,再根据Routh阵列,看第一列有几次变号,即含几个带正实部的根,阵列表里面的数是怎么来的,请参考课本第135136页,要求熟练掌握。32s5 s4 6s3 3s2 s 10列出Routh阵列表如下:第一列改变了两次符号,所以特征根中带正实部的根数为2个;带零实部的根数为 0个;带负实部的根数为3个。5s5 s4 2s3 2s2 8s 8 0列出Routh阵列表如下:彳,、列12341 s51-2802 s41280
36、3 s3-40004 s228005 s1160006 s08000第一列改变了两次符号,所以特征根中带正实部的根数为2个;带零实部的根数为 0个;带负实部的根数为3个。T6-12有一系统的特征方程为s3 (1)s2 (1)s (1) 0试讨论使系统稳定时,的取值X围。解:列出 Routh阵列表如下:、列12313 s11022 s1103100s140 s100欲使系统稳定,如此需满足特征方程的全部系数均为正值且Routh阵列中的第一列各项均为正号。1 0即1 0且0,解得: 0,1.11 0T6-13给定如下闭环系统的开环传递函数,试应用Nyquist判据判断这些闭环系统的稳定性:1G(s
37、)2s 12(s 1)2G(s)10(1s)(1 2s)(1 3s)解:(1)、 G(s)2s 12(s 1)G(s)在不含虚轴的右半s平面上不含极点,即RG(j )j2 12(j1)21积分因子数为0,极点数 零点数1 1 0.1当0时,G(jO)-;当 时,G(j ) 1.画出G(j )的Nyquist图,如图(a)所示:-i0.25Im00.51Re由图a知,G0 j 的Nyquist曲线不包围点-1, jO ,即N 0.N P00,闭环系统是稳定的。、G(s)P。0,G0(s)在不含虚轴的右半s平面上不含极点,即(1s)(1 2s)(1 3s)G(j )10(1 j )(1 2j )(
38、1 3j )2310 1 11 2 j 6 36积分因子数为0,极点数 零点数 3 03.3 当0时,G(j0) 10;当 时,G(j ) 0-.2令lmG(j)0得1rad /s,考虑正频率特性,此时 :ReG(j1)1;1令 ReG0( j)0 得rad /s 0.3rad /s,考虑正频率特性,此时 :lmG0(j0.3)6.1.J11画出G0(j )的Nyquist图,如图(b)所示:由图b知,G0 j的Nyquist曲线通过点-1,j 0,闭环系统临界稳定,即不稳定。T6-14系统的开环Nyquist图如图T6-14所示。图中P右代表系统开环传递函数在右半s平面上的极点数,试判断它们
39、的稳定性。eR oRe题号P右NNP右系统稳定性a2-20稳定b022不稳定c000稳定d022不稳定e022不稳定f112不稳定题后小结:1、在Nyquist曲线中,正频率曲线与负频率曲线关于实轴对称;2、 当0时的曲线与坐标轴交于 无穷远处时,应从Nyquist曲线的0处沿顺时针环绕n到 0处,其中n为开环传递函数的积分因子数,在坐标图上怎么看出n的值:应从正实轴开始,顺时针走过 角到 0处,n式中的“”负号是因为规定沿顺 时针走过的角度为负;23、Nyquist曲线包围点 1, j0的次数N怎么算?笔者提供两种方法 在Nyquist曲线画正确的前提下,请参考:法一:注意顺时针包围 为N正
40、,逆时针包围N为负;我们从处开始,沿行进方向,从上一次穿过实轴到下一次穿过实轴计数一次(此时Nyquist曲线只走过了 180,所以每次只能计舟圈, 其正负根据顺时针包围 还是逆时针包围去判断);走完一个周期0就停止;法二:如果不喜欢数圈,那就“穿越”吧,这样快。我们定义Nyquist曲线在点1, j0以左穿过负实轴时,称为“穿越”,穿越又有正穿越和负穿 越之分(二者的区别请 见图A-B)。其中:N负穿越次数 正穿越次数同学们可以用穿越的方法去计算一下本题中图a 图b的N.图A B请同学们把第七章的例题7-2、7-3、7-4看懂。例7-2.解:依题意,原系统的开环传递函数:G(s)20(15s
41、)(10.5s)(10.05s)调整开环增益 K 20至K 40,如此G0(s)40(1 5s)(1 0.5s)(10.05s)频率特性:G(j )40(1 j5 )(1j0.5 )(1j0.05 )7.15, max 6.54rad/s, 得max0.057s, T20.41s.此时,剪切点频率为 c ,对应的相位裕量为,如此180(G(j c) 180 tg 15 c tg 10.5 c tg 10.05 c 18.采用超前校正,根据 一和,必须添加的相位超前量:501832预想一个裕量5,如此新超前量:max37,如此1sinmax4.021sinmax1根据调整增益后的 Bode图,确
42、定LmG0Lm26.04dB处的频率max,对应的相位裕量20lg40 20lg5 max 20lg0.5max6.04 得max5.66rad /s,180(G(j max) 180 tg 15maxtg 10.5maxtg 10.05amax.根据一和,必须添加的相位超前量:max -44max37.说明预想的裕量不足,另选17,重新计算新超前量:49,1sin maxmax1Sin max1根据调整增量后的 Bode图,确定LmG0Lm28.54dB处的频率max,对应的相位裕量20lg40 20lg5 max 20lg0.5 max8.54 得max6.54rad / s,180(Go
43、(j max) 180 tg 15maxtg 10.5maxtg0.05max1由 20lg40 20lg54rad / s,c7.15c 20lg0.5 c 0,得49 max 49 . 应 当 选所以,校正后的开环传递函数为:40(1 o.41s)(15s)(10.5s)(10.057s)(10.05s)例 7-3.50解:依题意,原系统的开环传递函数:G0(s)502 ,(1 5s)(1 0.05s)频率特性:G0( j )50(1 j5 )(1j0.05 )255 .G(s)K(1 5s)(10.05s)2频率特性:KG(j )(1 j5 )(1j0.05 )2.如此此时,开环传递函数
44、为:由tg 15 c180(G(j c) 18018090 2tg 9.05 c55 .2tg 10.05此时,剪切点频率为 c ,对应的相位裕量为,如此由 20lg50 20lg5 c 0,得 c 10rad / s,180(G0(j c) 180 tg 15 c 2tg 10.05 c 38_ 50.估计一个裕量 5,调整开环增益至 K,使新剪切点c处的相位裕量得 c 6.3rad/s.又由 20lgK 20lg5 c 0得:K31.5采用滞后校正,从检查点A向右下方作一斜率为40dB/dec的线段交调整后的幅频渐近线于点A,由 20lg100 40lg5 A20lg31.5 20lg5
45、A得:A 0.63rad/s.与点A、A对应的频率即为该环节在 Bode图上的两个转角频率,即T110.25s, T10.6316s,0.32 .所以,校正后的开环传递函数为:G(s)100(1 1.6s)(1 5s)2 (1 0.05s)2例 7-4.解:原系统的开环传递函数:G(s)20(1 5s)(10.5s)(10.05 s)频率特性:G0(j )20(1 j5 )(1j0.5 )(1j0.05 )此时,剪切点频率为C,对应的相位裕量为,如此由 20lg20 20lg520lg 0.5 c 0,得 c 2.83rad/s,180(G(jc)1801 1 1tg 5 c tg 0.5 c
46、 tg 0.05 c 31 .先采用超前校正,同时调整增益至估计一个裕量 5,根据,必须添加的相位超前量:max34,如此 1 sin max 3.541 sin max3.54 2.830.19s,T2 0.66s 0.5s.故由20lg K20lg5 c 0得:K 14.15再采用滞后校正,Kv线与LmK线的交点为0.14rad /s.由 20lg100 20lg50 A 20lg14.15得: A1故 T150s, T10.0210.147.14s,0.143.综上知,校正后的开环传递函数为:G(s)100(1 7.14s)(10.66s)(1 50s)(1 5s)(10.5s)(10.19s)(1 0.05s)
- 温馨提示:
1: 本站所有资源如无特殊说明,都需要本地电脑安装OFFICE2007和PDF阅读器。图纸软件为CAD,CAXA,PROE,UG,SolidWorks等.压缩文件请下载最新的WinRAR软件解压。
2: 本站的文档不包含任何第三方提供的附件图纸等,如果需要附件,请联系上传者。文件的所有权益归上传用户所有。
3.本站RAR压缩包中若带图纸,网页内容里面会有图纸预览,若没有图纸预览就没有图纸。
4. 未经权益所有人同意不得将文件中的内容挪作商业或盈利用途。
5. 装配图网仅提供信息存储空间,仅对用户上传内容的表现方式做保护处理,对用户上传分享的文档内容本身不做任何修改或编辑,并不能对任何下载内容负责。
6. 下载文件中如有侵权或不适当内容,请与我们联系,我们立即纠正。
7. 本站不保证下载资源的准确性、安全性和完整性, 同时也不承担用户因使用这些下载资源对自己和他人造成任何形式的伤害或损失。
最新文档
- 2020【企业咨询】行业前景分析投资调研课件
- 2020、6《民法典》资深律师解读宣讲课件
- 2020《推广普通话主题班会》课件
- 1205史剑波《纪昌学射》教学ppt课件
- 1981-1990诺贝尔生理或医学奖课件
- 2020【CDMO】行业前景分析投资调研课件
- 2020-2021年A股投资策略报告课件
- 2020【自助售货机】行业前景分析投资调研课件
- 刘姥姥进大观园PPT部编版9上课件
- 2020-2021年创新说课大赛获奖作品:教师说课比赛:等差数列课件
- 婚姻家庭与继承法课件
- 2020-2021年85、95后宝妈人群洞察课件
- 青少年的同伴关系
- 2020-2021年创新说课大赛获奖作品:教师说课比赛:等差数列的前n项和课件
- 青少年用眼健康知识讲解
