 GPS水下超声定位实验解析
GPS水下超声定位实验解析

《GPS水下超声定位实验解析》由会员分享,可在线阅读,更多相关《GPS水下超声定位实验解析(7页珍藏版)》请在装配图网上搜索。
1、GPS 水下超声定位实验振动频率高于 20KHZ 的声波称之为超声波。超声波具有方向性强、反射性强和功率大 的特点,因此,超声技术的应用几乎遍及工农业生产、医疗卫生、科学研究及国防建设等方 面。利用超声波作为定位技术也是蝙蝠等生物作为防御及捕捉猎物的手段。超声波是一种弹 性机械波,它在水中可实现远距离传播,所以在声纳、超声波鱼群探测仪等得到了广泛的研 究和应用,近来在机器人的障碍探测方面也应用相当普遍。本文介绍的水下超声定位演示仪 利用了渡越时间测距及方向角检测法进行定位,运用单片机进行处理和控制,利用自编的软 件进行实验数据的处理和分析,从而使学生通过实验进一步认识到水下超声定位的原理。 实
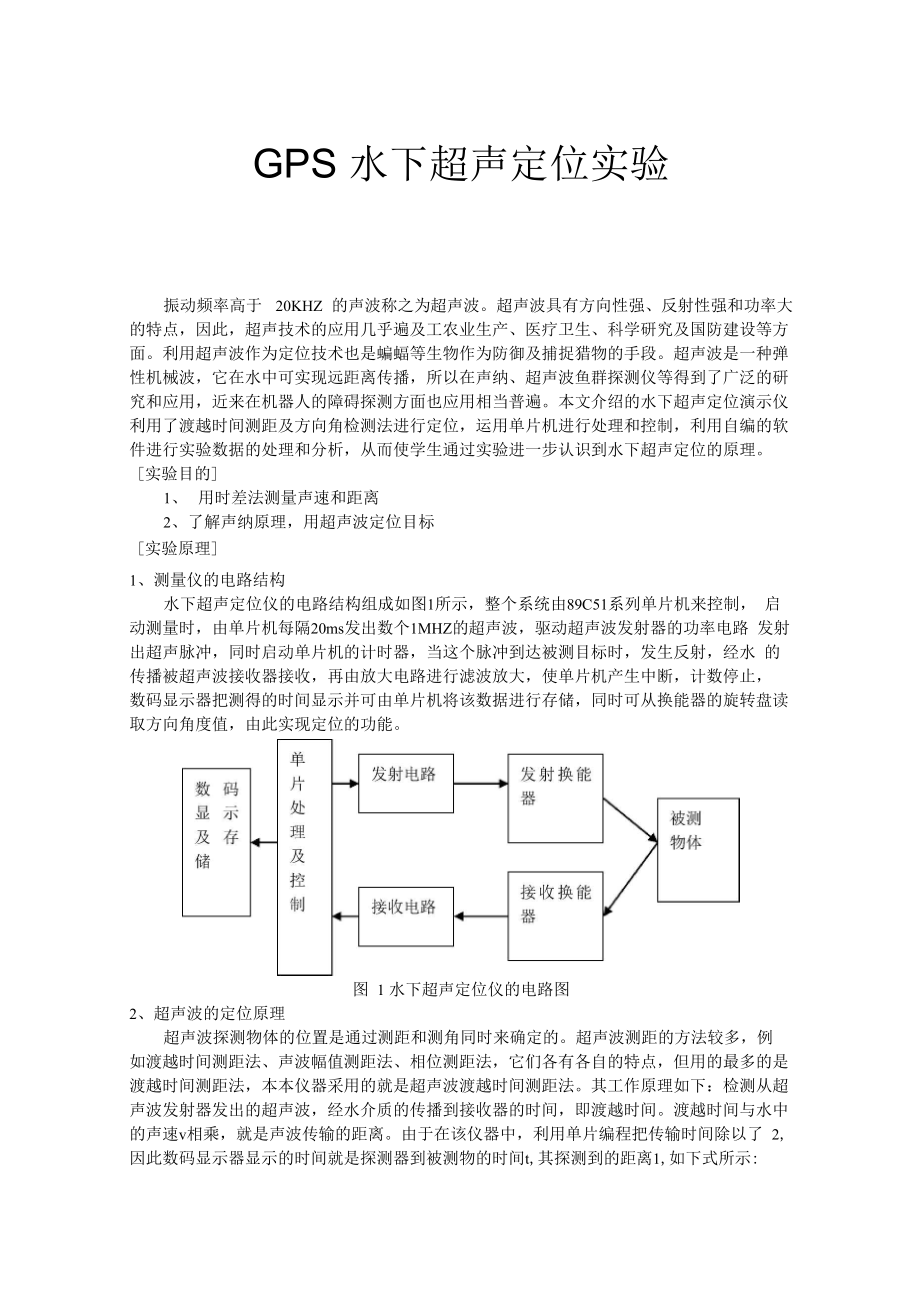
2、验目的1、用时差法测量声速和距离2、了解声纳原理,用超声波定位目标实验原理1、测量仪的电路结构水下超声定位仪的电路结构组成如图1所示,整个系统由89C51系列单片机来控制, 启动测量时,由单片机每隔20ms发出数个1MHZ的超声波,驱动超声波发射器的功率电路 发射出超声脉冲,同时启动单片机的计时器,当这个脉冲到达被测目标时,发生反射,经水 的传播被超声波接收器接收,再由放大电路进行滤波放大,使单片机产生中断,计数停止, 数码显示器把测得的时间显示并可由单片机将该数据进行存储,同时可从换能器的旋转盘读 取方向角度值,由此实现定位的功能。图 1 水下超声定位仪的电路图2、超声波的定位原理超声波探测
3、物体的位置是通过测距和测角同时来确定的。超声波测距的方法较多,例 如渡越时间测距法、声波幅值测距法、相位测距法,它们各有各自的特点,但用的最多的是 渡越时间测距法,本本仪器采用的就是超声波渡越时间测距法。其工作原理如下:检测从超 声波发射器发出的超声波,经水介质的传播到接收器的时间,即渡越时间。渡越时间与水中 的声速v相乘,就是声波传输的距离。由于在该仪器中,利用单片编程把传输时间除以了 2, 因此数码显示器显示的时间就是探测器到被测物的时间t,其探测到的距离1,如下式所示:1 vt ( 1 ) 对(1)式两边微分可得:dl = vdt + tdv(2)式( 2)说明,超声波测距传感器的测试精
4、度是由渡越时间和声速两个参数的精度决定。如 将v看作常量,则(2)式可简化为:3)dl = vdt = v f式( 3)表明:计时电路的计时频率越高,传感器的测试精度越高,因此我们在设计时把计时频率设计在2MHZ,时间分辨率为05卩s。超声波的传播速度受介质温度影响最大,超声 波速度 v 与环境温度的关系可由以下经验公式给出:v = 4 x 331.4 x.(T = 273.16)273.16(4) 同时该温度下的速度v也可利用逐差法通过实测的方法求得,而目标目标的角度测量可直接 从换能器的方向旋转刻度盘读取。对目标的进行定位,知道它相对参考点 处于什么位置,可以用直角坐标描述,也可 以用极坐
5、标描述,本实验用极坐标来描述目 标位置,如图2所示,知道1和就确定目 标方位, l 的测量用超声波。实验模拟装置由 圆柱体容器以及安装在容器壁上的探测传感 器待附件组成。被测物 1 挂在具有丝杆装置 可使其沿容器半径方向做径向移动的横梁 2 上,即被测物体可位于横梁任一位置。同时, 横梁2可以绕容器中心O旋转,3是换能器 与可读取方向角度值的旋转盘。我们设计 的仪器横梁转动角度。的变化范围是-90 到+90,换能器转动角度范围也是-90 到+90,被测物在圆柱半径方向可以在 0 到 18.0cm 之间变化。3、实验数据的计算首先,在初始时刻,当换能器置于=0 时,仪器横梁也处在9=0。位置,即
6、在同一 直径上,此时可以利用经验公式(4)求取v (亦可利用逐差法测出超声波的波速)。利用测 量仪测出回波的时间t,从而可求出探测器到圆柱体容器中心的长度P = vxt,从而完成pp仪器的定标。然后,我们利用被测物1、换能器2的位置与角度以及圆柱体容器中心0三噗 构成三角形,根据余弦定理可得:=P2 + 12 - 2Pl cos(O)( )=兀一 arccos、; P2 + r2 一 12 v 2rP5)( 6 )其中r和帝表示了根据实测所得到的实验值。为了使同学在实验中便于比较,我们在软件 中确定被测物体可以做三种形式的运动,因此在软件开发时我们设定了直线段、圆弧、抛物 线三种标准曲线。只要
7、在开始实验时,确定好被测物的运动轨迹、起始点与终点坐标、角度 步长A0和长度步长Ar,该软件即可给出被测物的运动轨迹上每一个测量点坐标的理论值 r与。学生在实验完成后,将所得实验结果输入计算机,该软件即可自动用列表与绘图的 方式给出实验结果(r、9r )与理论值(r、的相对误差及运动轨迹图。实验仪器GPS 水下超声定位仪一套,示波器(选配)实验内容1、定标,求传感器到圆柱体容器中心的长度P测量实验室的温度,利用公式(4)算出当前温度下,声波在水中的传播速度。也可以 在和9=0。时,被测物每移动10.0mm测量一次时间,至少测量10次,然后用受逐差法通 过实测的方法来求得该温度下的速度v。用仪器
8、所所带的薄铜片挂在圆柱体容器中心的锣钉 上,测量时间,计算长度P。2、运动轨迹追踪确定好被测物的运动轨迹、起始点与终点坐标、角度步长A0和长度步长Ar,用软件 即可给出该被测物的运动轨迹上每一个测量点坐标的理论值r与9,将被测物每放置一个位 置测量一次时间和角度。学生可利用被测物、换能器的位置与角度以及圆柱容器中心三点 构成的三角形,根据余弦定理求得r和0。数据与结果1、记录实验室的温度。2、自拟表格记录所有的定标实验数据。表格的设计要便于用逐差法求相应集团的差值和计 算。( 1)被测物作直线运动运动轨迹坐标的理论值(r、0 )和根据实测结果利用软件所得的实验值(r、0)ii见表 1,绘出实验
9、与理论计算所得的运动轨迹,参数坐标转变为直角坐标。表 1 直线运动测量结果运动轨迹坐标的理论值(r、0 )和根据实测结果利用软件所得的实验值(r、0)ii见表 2,绘出实验与理论计算所得的运动轨迹,参数坐标转变为直角坐标。表 2 圆周运动测量结果编号(i)12345678r (cm)r (cm)(Ar/r )100%0(rad)0. (rad)(A0/0)1OO%附录1、GPS 水下超声定位仪的使用说明超声 GPS 定位实验仪是利用仪器发射超声波,然后接收超声波的回波来探测目标的距 离。由于仪器发出的超声波电信号频率高达兆赫兹量级,声波的指向性很好,这样就可以得 到方位,从而确定目标的位置。(
10、1)发射输出接发射传感器,接收输入接接收传感器,接收输出接示波器,示波器时间衰减放在100卩s档,幅值衰减放在0.1V档,探头衰减放在x 10档。(2)按下电源电源开关,蓝色发光二极管亮, LED 显示窗口如果显示“0”,表示接收传感 器没有接收到回波。转动方向杆,超声波碰到目标,显示窗口会显示某一值,表示回波,同 时在示波器上可以观测到回波信号,示波器上得到的时间是显示窗口的两倍。(3)时间和方位角存储:按一下存储键,微处理器自动将时间存入。存入时间后,微处理 器控制蓝色发光二极管和红色二极管交替亮一下,表示存入正常。按一下角度键,红色发光 二极管亮, LED 显示窗口显示“0”。读出方向杆
11、上角度值,通过数字和点按键输入,输入 值不能超过四位,否则自动清零。输入错误,也可以用“清除”键改正,认为角度值正确, 按一下存储键,微处理器自动将角度存入。存入角度值后,微处理器控制蓝色发光管和红色 发光管交替亮一下,表示存入正常,同时微处理器自动将第几次存储值存入(一次时间和一 次角度算一次存入值)。(4)检查功能的使用:在测量回波时间的状态下,蓝色发光二极管亮,按一下检查键, LED 显示窗口显示“0”,等待输入检查哪一次,输入的检查哪一次的次数要小于存入的次数,否 则微处理器不予处理。输入检查哪一次的值要小于存入的次数,微处理器处理,先显示检查 次的次数,同时蓝色发光管和红色发光管全亮
12、;再显示时间,蓝色发光管和红色发光管交替 亮一下;最后显示角度值,蓝色发光管的红色发光管交替亮一下,如果无任何键按下,微处 理器重复显示刚才的值。如果一直按下检查键,微处理器自动往上显示检查次的值、时间、 角度值,直到最大的存储值。(5)退出检查功能:在 LED 显示窗口显示“0”或者微处理器重复显示刚才的值情况下, 一直按下“清除”键,回到测量回波时间的状态下。仪器在使用的过程中遇到突然断电的情况,数据将丢失。S (mm)50.060.070.080.090.0100.0110.0120.0130.0140.0T(卩 s)1181251311381451511581641711732、实验数
13、据计算实例(1)定标由于利用温度法计算声波的速度很简单,故在此仅介绍逐差法求速度,实验数据如表 3 所示。表3利用逐差法可得移动 1mm 所需的时间为:(151 -118)+(158 -125)+(164 -131)+(171 -138)+(189 -145),宀 “t 二二 6.63 x 10-6 s25速度v =10.0 x 10 -36.63 x 10-6=1508m/s则可求得声波的速度为:已知t = 83.6卩s,故可得探头到中心的距离为:pP = vxt = 83.6 x10-6 x1508 = 12.61cm p(2)被测物作直线运动运动轨迹坐标的理论值(r、9 )和根据实测结果
14、利用软件所得的实验值(r、0) ii见表 1,其实验与理论计算所得的运动轨迹如图3 所示,在该图中参数坐标已转变为直角坐 标。表 1 直线运动测量结果编号(i)12345678r (cm)i8.05.95.25.36.18.511.216.0r (cm)i7.95.95.45.46.38.311.016.0(Ar/r)100%1.2503.841.883.272.351.7809(rad)i60.040.020.00-20.0-40.0-50.0-60.09 (rad)i59.039.519.50-19.1-38.3-48.0-60.0(A9/9)100%1. 661.252.5004.504
15、.254.000( 3)被测物沿圆周运动运动轨迹坐标的理论值( r 、 9 )和根据实测结果利用软件所得的实验值( r、 9 ) ii见表 2,其实验与理论计算所得的运动轨迹如图3 所示,在该图中参数坐标已转变为直角坐标。表 2 圆周运动测量结果编号(i)12345678r (cm)i15.0015.0015.0015.0015.0015.0015.0015.00r (cm)i14.8014.9514.8615.0014.4014.7114.6015.00(Ar/r )100%1.330.331.0604.001.932.6009(rad)i90.060.030.00-30.0-60.0-80.0-90.09 (rad)i86.058.528.70-29.5-58.7-78.8-88.0(A9/9)ioo%4.442.504.3301.662.162.502.22
- 温馨提示:
1: 本站所有资源如无特殊说明,都需要本地电脑安装OFFICE2007和PDF阅读器。图纸软件为CAD,CAXA,PROE,UG,SolidWorks等.压缩文件请下载最新的WinRAR软件解压。
2: 本站的文档不包含任何第三方提供的附件图纸等,如果需要附件,请联系上传者。文件的所有权益归上传用户所有。
3.本站RAR压缩包中若带图纸,网页内容里面会有图纸预览,若没有图纸预览就没有图纸。
4. 未经权益所有人同意不得将文件中的内容挪作商业或盈利用途。
5. 装配图网仅提供信息存储空间,仅对用户上传内容的表现方式做保护处理,对用户上传分享的文档内容本身不做任何修改或编辑,并不能对任何下载内容负责。
6. 下载文件中如有侵权或不适当内容,请与我们联系,我们立即纠正。
7. 本站不保证下载资源的准确性、安全性和完整性, 同时也不承担用户因使用这些下载资源对自己和他人造成任何形式的伤害或损失。
