《计算机控制技术模拟卷子》由会员分享,可在线阅读,更多相关《计算机控制技术模拟卷子(4页珍藏版)》请在装配图网上搜索。
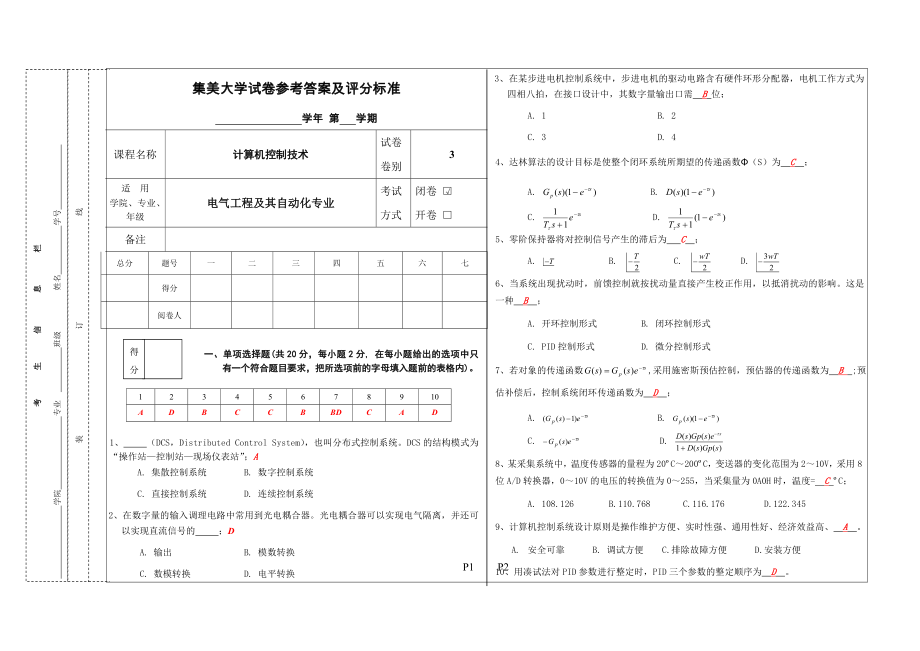
1、装 订 线考 生 信 息 栏 学院 专业 班级 姓名 学号 集美大学试卷参考答案及评分标准 学年 第 学期课程名称计算机控制技术试卷卷别 3适 用学院、专业、年级电气工程及其自动化专业考试方式闭卷 开卷 备注总分题号一二 三四五六七得分阅卷人得分一、单项选择题(共20分,每小题2分, 在每小题给出的选项中只有一个符合题目要求,把所选项前的字母填入题前的表格内)。12345678910ADBCCBBDCAD1、 (DCS,Distributed Control System),也叫分布式控制系统。DCS的结构模式为“操作站控制站现场仪表站”;AA. 集散控制系统 B. 数字控制系统C. 直接控制
2、系统 D. 连续控制系统2、在数字量的输入调理电路中常用到光电耦合器。光电耦合器可以实现电气隔离,并还可以实现直流信号的 ;DA. 输出 B. 模数转换C. 数模转换 D. 电平转换3、在某步进电机控制系统中,步进电机的驱动电路含有硬件环形分配器,电机工作方式为四相八拍,在接口设计中,其数字量输出口需 B 位;A. 1 B. 2C. 3 D. 44、达林算法的设计目标是使整个闭环系统所期望的传递函数(S)为 C ;A. B. C. D. 5、零阶保持器将对控制信号产生的滞后为 C ;A. B. C. D. 6、当系统出现扰动时,前馈控制就按扰动量直接产生校正作用,以抵消扰动的影响。这是一种 B
3、 ;A. 开环控制形式 B. 闭环控制形式C. PID控制形式 D. 微分控制形式7、若对象的传递函数,采用施密斯预估控制,预估器的传递函数为 B ;预估补偿后,控制系统闭环传递函数为 D ;A. B. C. D. 8、某采集系统中,温度传感器的量程为20C200C,变送器的变化范围为210V,采用8位A/D转换器,010V的电压的转换值为0255,当采集量为0A0H时,温度= C C;A. 108.126 B.110.768 C.116.176 D.122.3459、计算机控制系统设计原则是操作维护方便、实时性强、通用性好、经济效益高、 A 。A.安全可靠B. 调试方便 C.排除故障方便D.
4、安装方便10、用凑试法对PID参数进行整定时,PID三个参数的整定顺序为 D 。A. Kp、Kd、KiB. Ki、Kp、KdC. Kd、Ki、KpD. Kp、Ki、Kd得分二、请用光电耦合器设计数字量输出调理电路的原理图,要求将05V的输出数字量信号经光电耦合器后转换成024V的数字量信号。(10分)+5V+24VR1R2R3C1K得分三、逐点比较插补原理(共20分,每题10分)1、请根据后面的表3.3和图2,对起点为(5,0),终点为(0,5)的圆弧进行插补列表计算,并作出走步轨迹图,要求标明进给方向和步数。(10分)2、请根据后面的表3.3和图2画出SR1插补的程序流程图。(10分)偏差判
5、别坐标进给偏差计算坐标计算终点判断F=0x=5, y=010F0-xF=F-2*5+1=-9x=4, y=0 9F0+yF=F+2*0+1=-8x=4, y=18F0+yF=F+2*1+1=-5x=4, y=27F0+yF=F+2*2+1=0x=4, y=36F0-xF=F-2*4+1=-7x=3, y=3 5F0+yF=F+2*3+1=0x=3, y=44F0-xF=F-2*3+1=-5x=2, y=4 3F0?结束调用+xF=F+2*|x|+1YYNNy=y-1x=x+10xy4321543215做成其他象限,其余正确-2计算正确,未画图-3得分四、步进电机控制(共10分)。用51系列单片
6、机的P1口控制四相步进电机。已知驱动电源中没有环形分配器,请分配四相八拍工作方式的控制接口,并根据接口分配写出输出字表,并编写正反转控制程序P1.7 P1.6 P1.5 P1.4 P1.3 P1.2 P1.1 P1.02分 D C B A正转 反转01 03 02 06 04 0C 08 09 01 09 08 0C 04 06 02 031分1分A8= 1,3,2,6,4,12,8,9 int i,k i=0; Outputb Port,Ai);定位 delay(x);或定时器定时 if(k) if(i=7) i=0 else i+; eles if(i=0) i=7; else i-; 得
7、分五、数字控制器设计(共40分)1、(10分)已知调节器传递函数为:2分,采样周期 T=0.5s,试用后向差分法(), 求出D(z)、u(k)和u(k);2.5-2z-1D(z)= = = 2(1-z-1)+0.52(1-z-1)+0.22.2-2z-11.136-0.909z-11-0.909z-1解:s=2(1-z-1)4分 2分u(k)=0.909u(k-1)+1.136e(k)-0.909e(k-1)2分u(k)=0.091 u(k-1)+1.136e(k)-0.909e(k-1)2、(10分)在图1串级控制系统中、,请写出控制程序流程图。图1 解:,开始u1(k-1)=e1(k-1)
8、=e1(k-2)= u2(k-1)=e2(k-1)=0, 输入sp采样时间到?YN采集y1和y2并计算e1(k)=r-y1DA输出u(k)u1(k-1)=u1(k), u2(k-1)=u2(k)e1(k-2)=e1(k-1), e2(k-1)=e2(k)e1(k-1)=e1(k)u1(k)=u1(k-1)+0.6e1(k)-0.4e1(k-1)+0.05e1(k-2)e2(k)=u1(k)-y2(k)u2(k)=u2(k-1)+0.5e2(k)-0.3e2(k-1)分成2个独立的控制通道-43、(10分)已知被控对象的传递函数为,采样保持器为,采样周期T=1S,请计算。 (常见的Z变换:、 、)解:4、(10分)已知广义对象的脉冲传递函数为: , 要求针对 ,T=1s,设计最少拍有纹波控制器传递函数D(z)。解:u=0, v=1,j=1,q=1,d=0,m=u+d=0,F1(z)=1; n=v-j+q=1, 偏差Fm0Fm0偏差Fm0Fm0图2P8P7
 计算机控制技术模拟卷子
计算机控制技术模拟卷子