 11探究动能定理的创新型实验
11探究动能定理的创新型实验

《11探究动能定理的创新型实验》由会员分享,可在线阅读,更多相关《11探究动能定理的创新型实验(31页珍藏版)》请在装配图网上搜索。
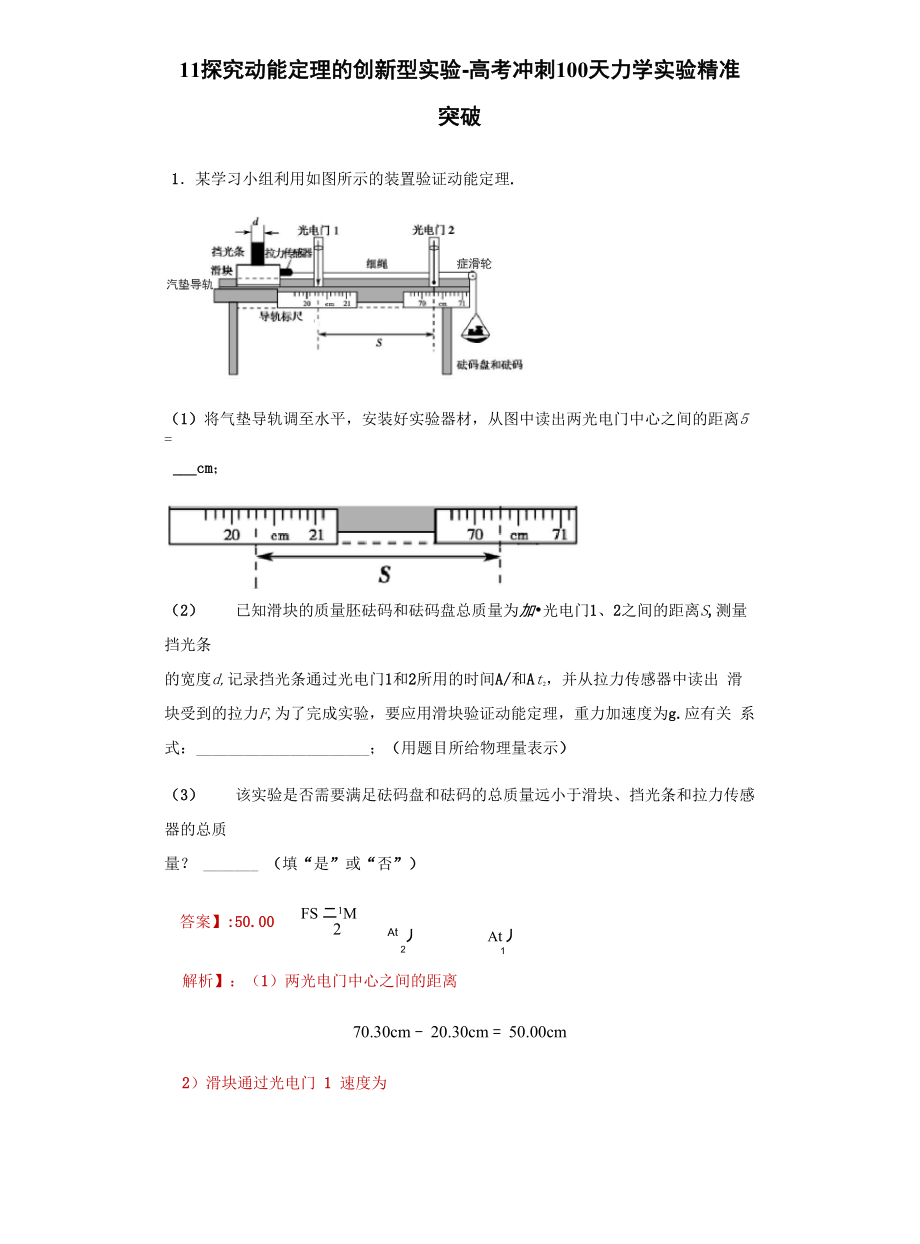
1、11探究动能定理的创新型实验-高考冲刺100天力学实验精准突破1某学习小组利用如图所示的装置验证动能定理.I症滑轮汽垫导轨(1)将气垫导轨调至水平,安装好实验器材,从图中读出两光电门中心之间的距离5 =cm;(2)已知滑块的质量胚砝码和砝码盘总质量为加光电门1、2之间的距离S,测量挡光条的宽度d,记录挡光条通过光电门1和2所用的时间A/和At2,并从拉力传感器中读出 滑块受到的拉力F,为了完成实验,要应用滑块验证动能定理,重力加速度为g.应有关 系式:;(用题目所给物理量表示)(3)该实验是否需要满足砝码盘和砝码的总质量远小于滑块、挡光条和拉力传感器的总质量? (填“是”或“否”)答案】:50
2、.00FS 二1M2At 丿2At丿1解析】:(1)两光电门中心之间的距离70.30cm - 20.30cm = 50.00cm2)滑块通过光电门 1 速度为At1滑块通过光电门2 速度为dv = 一2 At2根据功能关系需要验证的关系式为111At 丿2At丿1FS = Mv 2 一 Mv 2 = M22212(3)该实验中由于已经用传感器测出绳子拉力大小,不是将砝码和砝码盘的重力作为小车的拉力,故不需要满足砝码和砝码盘的总质量远小于小车的质量。2.某同学用如图所示装置完成探究“合力做功与动能变化的关系”实验,轨道CD水平, 重物通过轻质细线拉着固定有遮光条的小车从A点由静止开始运动,通过B
3、点时,与 光电门相连的数字计时器读出遮光条通过光电门的时间为用天平测出重物的质量m, 用游标卡尺测量小车上遮光条的宽度,用毫米刻度尺测得A、B之间的距离为L。尤电门遽光籌小车该同学用游标卡尺测量出遮光条的宽度d=2.85mm,贝V该同学用的的游标卡尺;(选填“10分度”、 “20分度”或“50 分度”)(2)计算小车通过B点时速度的公式v=;(用所测物理量符号表示)(3)若某次实验中,力传感器的读数为F,当地重力加速度为g,则小车从A点由静止开始运动到B点过程中,合力对重物所做功W=,重物动能变化量AEy (用上面所测物理量和已知量的符号表示)。【答案】20分度 亠(mg - F ) L1 (
4、 d )2 m I 2 (At 丿【解析】(1)因为测量出遮光条的宽度的最小分度值为0.05mm,所以该同学用的是20分度的游标卡尺。(2)用平均速度来表示瞬时速度,因为通过光电门的时间很短,则有dv = 。B At(3)合力对重物所做功为w= (mg - F)L重物动能变化量为AEk1=mv 22 B-0=1 ( d )22 (At 丿3某学习小组采用图甲所示气垫导轨装置验证滑块碰撞过程中的动量守恒。其主要实 验步骤如下,请回答下列问题。(1) 用天平测得滑块AB (均包括挡光片)的质量分别为mm2 ;用游标卡尺测得挡光片的宽度均为d。若某次用游标卡尺测量挡光片的宽度时的示数如图乙所示,则其
5、读数为mm。(2) 充气后,调节气垫导轨下面的旋钮,导轨左侧放一个滑块并推动滑块,滑块通过两个光电门时,若与光电门1、2相连的计时器测得的挡光时间分别为0.05 s、0.06 s,则应 使导轨右端(选填“调高”或“调低”),直至滑块在导轨上运动,通过两个光电门时,说明气垫导轨已经调节水平。(3) 滑块B放在两个光电门之间,滑块A向左挤压导轨架上的轻弹簧,并释放滑块A, 滑块A 一直向右运动,与光电门1相连的计时器的示数只有一个,为,与光电门2 相连的计时器的示数有两个,先后为t、t3。(4) 在实验误差允许范围内,若表达式(用测得的物理量表示)成立,说明滑块A、碰撞过程中动量守恒;若表达式(仅
6、用t、t和t表示)成立,1 2 3说明滑块A、碰撞过程中机械能和动量均守恒。mmm【答案】:5.20调低 两个计时器显示的时间相等:=丁 + ;1 3 2111+ =ttt1 3 21 mm【解析】:游标卡尺的读数为5mm +x4 = 5.20mm。d(2)同一滑块通过两个光电门,由v =知,时间长的速度小,可知滑块做减速运动,导 t轨右端应调低一点,直至两个计时器显示的时间相等,即说明滑块做匀速运动,导轨已 调成水平。ddd滑块A碰前速度v =,碰后速度二;,滑块B碰后速度v2 = ,在实验误差允132许范围内,若表达式m m m1 = 1 + 2 ttt1 3 2说明碰撞过程中动量守恒;
7、若表达式111m v 2 = m v 2 + m v 22 1 2 1 1 2 2 2mmm1 = 1 + 2t 2 t 2t 21 3 2联立解得111+ =ttt1 3 2说明碰撞过程中机械能和动量均守恒。4用如图甲所示的实验装置完成“探究动能定理”实验。请补充完整下列实验步骤的相 关内容。甲光电门遮址片囂警门用天平测量小车和遮光片的总质量M砝码盘的质量m0;用游标卡尺测量遮光片的宽度d,游标卡尺的示数如图乙所示,其读数为cm;按图甲所示安装好实验装置,用米尺测量两光电门之间的距离s。in,lllllllllIHL3 d1111 111111jnniill(2) 在砝码盘中放入适量砝码;适
8、当调节长木板的倾角,直到轻推小车,遮光片先后经过 光电门A和光电门B的时间相等。(3) 取下细线和砝码盘,记下(填写相应物理量及其符号)。(4) 让小车从靠近滑轮处由静止释放,用数字毫秒计时器分别测出遮光片经过光电门A 和光电门B所用的时间A/A和AtBo(5) 在步骤(4)中,小车从光电门A下滑至光电门B过程合外力做的总功W厶=,合小车动能变化量AEk=(用上述步骤中的物理量表示,重力加速度为g),比较W和AEk的值,找出两者之间的关系。合k(6) 重新挂上细线和砝码盘,改变砝码盘中砝码质量,重复(2 )(5)步骤。(7) 本实验中,以下操作或要求是为了减小实验误差的是A. 尽量减小两光电门
9、间的距离sB. 调整滑轮,使细线与长木板平行C. 砝码和砝码盘的总质量远小于小车的质量【答案】:0.520砝码盘中砝码的质量m(mm0)gsAt 丿BAt丿A【解析】: (1)游标卡尺是 20 分度,所测遮光片的宽度应是主尺读数与游标尺两读数之和即d 二 5 mm + 4 x 0.05 mm 二 5.20 mm 二 0.520 cm(3)在砝码盘中放入适量砝码,适当调节长木板的倾角,直到轻推小车,遮光片先后经过 光电门A和光电门B的时间相等,这一步目的是使取下细线和砝码盘后,小车运动所 受合外力等于砝码和砝码盘的重力(m+m)g,所以当取下细线和砝码盘时,记下砝码盘 中砝码的质量m。(5) 小
10、车从光电门 A 下滑至光电门 B 过程中合外力做的总功W =(m + m )gs合0小车动能变化量AEk1r d21r d 2-MM2At丿21 AtBA(7)A.尽量减小两光电门间的距离s,会增大测量误差,A错误;B. 调整滑轮,使细线与长木板平行,这样细线拉力等于小车做加速运动时受到的合外 力,有利于减小误差,B正确;C. 实验次数只有一次,小车的合力等于(m+m)g,若要多次重复实验,需要反复平衡摩 擦力,都不需要满足砝码和砝码盘的总质量远小于小车的质量,C错误,故选B。5某学习小组利用如图所示的实验装置验证“动能定理”。他们将气垫导轨(滑块在该 导轨上运动时所受阻力可忽略)放在水平桌面
11、上,将导轨调至水平。在气垫导轨上安装 了光电门A和B,两光电门中心的距离为x ,滑块上固定一宽度为d的遮光片,滑块和 遮光片的总质量为M。滑块用细线绕过水平桌面右端的定滑轮与质量为加的钩码相连, 将滑块移至光电门A左侧某一位置,由静止释放钩码,钩码落地前滑块己通过光电门B,滑块通过光电门A和B的挡光时间分别为tl和12。已知重力加速度为g。海世吃L P(1) 滑块从光电门A运动到光电门B的过程中,滑块、遮光片、钩码组成的系统所受合力对系统做功的表达式.=(用可能用到的符号m、x、g表示)。A(2) 滑块从光电门A运动到光电门B的过程中,滑块、遮光片、钩码组成的系统动能的增加量Ek =(用可能用
12、到的符号M、肌、d、t、t表示)。k12(3) 经多次实验,WA总是大于E请分析造成这个结果可能的原因是出一条即可)。答案】: mgx (M + m)气垫导轨未调节水平;滑轮的轴不光滑;滑轮有质量;细绳与滑轮之间有摩擦;空气阻力作用(写出一条即可,其他合 理答案也可得分)【解析】(1)在滑块从光电门A运动到光电门B的过程中,只有钩码重力做功,则WA=mgx(2) 滑块从光电门A运动到光电门B的过程中,滑块的初速度01 1 j 1 1 1 1 1 11 1 1 1 1 12 (tm)1 1 1 1 1 1 iI q 1 1 11: 1 1 1 11 1 1 1 1 1 101020末速度所以滑块
13、、遮光片、钩码组成的系统动能的增加量1iid 2=(M+ m )v2 一 (M+ m )v2= (M+ m ) 一Ek 2 2 2 2112丿d、J t1丿(3)经多次实验,WA总是大于Ek,请分析造成这个结果可能的原因是气垫导轨未调节水平,滑块重力与速度方向不垂直,滑块重力做功;滑轮的轴不光滑,存在摩擦力,摩擦力做功;骨轮有质量,滑轮转动由于惯性,要消耗部分能量;细绳与滑轮之间有摩擦, 存在摩擦力,摩擦力做功;空气阻力作用,空气阻力做功。6 如图所示,气垫导轨上质量为M的滑块通过轻质细绳绕过轻质动滑轮与拉力传感器 相连,动滑轮下悬挂质量为m的钩码,滑块上遮光条宽度为乩实验时,滑块由静止释 放
14、,测得遮光条通过光电门的时间为拉力传感器的读数为F。(1) 用游标卡尺测量遮光条宽度,其读数为cm。(2) 某同学在“探究绳子拉力对滑块做功与滑块动能变化的关系”实验时,记录滑块的初位 置与光电门的距离L及挡光条通过光电门的时间测得多组L和At值。应用图像法 一 处理数据时,为了获得线性图像应作图象(选填“乙- ”“ L 一而不”或At(At )2“L(At) 2”),该图像的斜率k=。(3) 该同学通过实验发现:绳子拉力F做的功总大于滑块动能的变化量。若实验数据测量准确,出现该情况的可能原因是。A. 钩码质量m未远小于滑块质量MB. 滑块运动过程中克服阻力做功C. 气垫导轨没有调节水平D.
15、没有考虑动滑轮的质量1【答案】:o.36OL-丽Md 22FBC【解析】:(1)游标卡尺的主尺读数为3 mm,游标尺上第12个刻度和主尺上某一刻度对齐,所以游标读数为12x0.05 mm=0.60 mm,所以最终读数为:3mm+0.60 mm=3.60mm=0.360 cm。d1 d(2)滑块通过光电门的速度戸心,根据动能定理可知M(兀)2,解得L=Md 22F1(At)2故为了获得线性图像应作l法图像;斜率为 k=Md 22F(3) A .小车受到的拉力是通过拉力传感器获得的,与钩码的质量和小车质量无关,故A错误;B. 滑块运动过程中克服阻力做功,故B正确;C. 气垫导轨没有调节水平,拉力做
16、功的一部分转化为小车的势能,动能减小,故C正 确;D. 动滑轮的质量不会影响拉力传感器的拉力大小,故D错误,故选BC。7.某实验小组用图甲实验装置探究合力做功与动能变化的关系。铁架台竖直固定放置 在水平桌面上,长木板一端放置在水平桌面边缘P处,另一位置放置在铁架台竖直铁杆 上,使长木板倾斜放置。长木板P处放置一光电门,用光电计时器记录滑块通过光电门 时挡光时间。实验步骤是:p图甲r込光电门用游标卡尺测出滑块的挡光宽度厶用天平测量滑块的质量m。平衡摩擦力:以木板放置在水平桌面上的P处为轴,调节长木板在铁架台上的放置位 置,使滑块恰好沿木板向下做匀速运动。在铁架台竖直杆上记下此位置0,用刻度尺 测
17、出Q1到水平面的高度H。保持P位置不变,长木板一端放置在铁架台竖直杆Q2上。用刻度尺量出QQ2的距离 勺,将滑块从Q2位置由静止释放,由光电门计时器读出滑块的挡光时间保持P位置不变,重新调节长木板一端在铁架台上的放置位置,重复步骤数次。滑块沿长木板由Q2运动到P的过程中,用测量的物理量回答下列问题(重力加速度已知为 g):滑块动能的变化量口件=(2)滑块克服摩擦力做的功W (3)合力对滑块做的功W合1 L2【答案】:-m mgH mgh12 t 211解析】: (1)滑块滑到 P 点处的速度Lv 1t1因此动能的变化量1 1 L2AEk二一mv2 二 m 一2 1 2 t21(2)设木板的长度
18、为S,在0i处时,木板的倾斜角为0,由于匀速下滑,则物体所受的摩擦力f = mg sin 0下滑过程中,克服摩擦力做功= fS = mg sin 0-S = mgH调整木板的倾角之后,铁架台到P点的距离x保持不变,因此摩擦力做的功W=卩mg cosS=卩mgxf保持不变,因此克服摩擦力做功= mgH(3)合力做的功W = W W = mg (h + H) mgH = mghGf118某同学利用如图所示的气垫导轨装置探究动能定理,在气垫导轨上安装了光电门, 滑块上固定宽度为D的遮光条,用细线绕过定滑轮将质量为M的滑块(含遮光条)与 重物相连,细线与导轨平行,实验中把重物的重力当做滑块受到的牵引力
19、,每次滑块都 从A处由静止释放,此处遮光条到光电门间距离为厶 重物的质量用m表示,遮光条 通过光电门的时间用t表示。(1)实验前调整气垫导轨水平,其目的是;(2)实验中把重物的重力当做滑块受到的牵引力,需满足的条件是(3)实验中保持L不变,通过改变来改变牵引力做的功。(4) 在处理实验数据时,四组同学建立下列四种坐标系,正确的是重物的质量 C答案】:使滑块重力不做功 滑块的质量远大于重物的质量 【解析】:(1)实验前调整气垫导轨水平,其目的是使滑块重力不做功;(2)实验中把重物的重力当做滑块受到的牵引力,需满足的条件是滑块的质量远大于重物的质量; (3)实验中重物的重力等于滑块受到的拉力,通过
20、改变重物的质量来改变牵引力做的功;(4) 滑块经过光电门时的速度为对滑块,由动能定理得mgL 1 Mv 2 - 02M mgL212故选 C。9某同学用如图所示的实验装置验证动能定理,所用器材包括:气垫导轨、滑块(上方安装有宽度为d的遮光条)、两个与计算机相连接的光电门、砝码盘和砝码等。实验步骤如下:开动气泵,调节气垫导轨,轻推滑块,当滑块上的遮光条经过两个光电门的遮光时间大约相等时,可认为气垫导轨水平; 用天平测砝码与砝码盘的总质量mi、滑块(含遮光条)的质量m2,用刻度尺测量A、B两光电门的距离S ;用细线跨过轻质定滑轮将滑块与砝码盘连接,并让细线水平拉动滑块;令滑块在砝码和砝码盘的拉动下
21、从左边开始运动,和计算机连接的光电门能测量出遮 光条经过A、B两处的光电门的遮光时间ti、t2。已知重力加速度为g,在遮光条随滑块从A运动到B的过程中。(1)如果将砝码和砝码盘所受重力视为滑块所受拉力,拉力对滑块做功的测量值叫= ;拉力对滑块做功的测量值叫拉力对滑块做的功巴(填“大于”“等于”或 “小于”);要使气与w2大约相等,满足的条件是。(2)不考虑遮光条宽度的影响,滑块动能的增量AE =;考虑遮光条宽度的影响,k1滑块动能的增量为AE,则AEAE (填“ ”“二”或“ ”)。k2 k1 k2答案】: m1gS大于mm121 (d2d2m 一2 2 ( 1212 丿21【解析】(1)根据
22、牛顿第二定律,求功公式有W = m gS, g - T = m a, T = m a1 1 1 2解得已知2 mg W m + m ii i 212mT =2m gm + m 1i2当mim2时,T二九则Wi与W大约相等。(2) 不考虑遮光条的宽度影响考虑遮光条宽度的影响,设遮光条的前端到达光电门AB的速度分别为VA、VBi=v t + at2A 1211=v t + at2B 222AEk2BA1AE= mk122d 2d 21 1212 丿 2 1丿解得f d1 2f d 1)v 2 v 2 =- 一atatBA1122 2丿t21l t1丿d 2 d2t2t 221(t 2 1212因为
23、t t ,12v 2 v 2BAt12丿AE AEk1 k 2若设遮光条的后端到达光电门A、B的速度分别为vA、”b,可推导相同的结果。将带有挡光片的小滑块从斜面上A点由静止释放,在斜面上与A点距离为x处固定一 光电门,光电门可记录挡光片的挡光时间t。改变释放点位置,小滑块始终由静止释放, 记录对应的x与t,以x为纵轴,1为横轴,描点作图得到如图所示的图像,贝y可推测t2在小滑块初速度为o的情况下,x与挡光片经过光电门时的速度v之间的关系为(选填“ x * v ”“ x g v2 ”或“ x”),合外力做的功w与x之间的关系为(选填“W g x”“W g x2 ”或“W 乂長”),进而可推知合
24、外力做的功w与V之间的关系为 (选填“w g v”“W g V2”或“WgJV”)。【答案】: x g v 2W g xW g v 2【解析】:由题图可知1x g 12挡光片过光电门的瞬时速度为dV t其中, d 为挡光片的宽度,贝可得x g v 2由分析可知x g v2初速度为 o 的匀加速直线运动的运动学公式为v2x =-2a则可知滑块下滑做匀加速直线运动,所以合外力做功为W = F合合则W x x由以上分析可知Wxxxx v2得W x v 211.有同学设计了如图所示的实验装置验证动能定理。一个电磁铁吸住一个质量为m的 小钢球,当将电磁铁断电后,小球由静止开始向下加速运动。小钢球经过光电
25、门时,计 时装置将记录小钢球通过光电门所用的时间t,用直尺测量出小钢球由静止开始下降到 光电门时的高度h,用游标卡尺测量了小钢球的直径d,设重力加速度为g。光电门计时 装置/电磁铁 电小钢球忽略空气阻力的影响,需要验证的小钢球重力做功与其动能关系的表达式为这名同学用游标卡尺测量了小钢球的直径,结果如图所示,他记录下来小钢球的直径 d =cm。这名同学在验证“动能定理”的过程中,除了上述的数据之外是否需要测量小钢球的质量?(填“需要”或“不需要”)【答案】gh=2f-T211丿1.326cm 不需要解析】: 小钢球的速度重力做功W=mgh小钢球的动能为1 1 f d =mv 2 = m 2 2
26、11 丿忽略空气阻力影响W=EK,1 f dmgh = m 2 11则需要验证的表达式为由图示游标卡尺可知,其示数为13mm+13x0.02mm=13.26mm=1.326cm; 根据表达式7 i( d gh = 2 7 J可知,实验不需要测量小钢球的质量。12某学习小组用图甲所示的实验装置探究拉力做功与小车动能变化之间的关系。小车 上遮光片的宽度为d, A、B处是两光电门,可测得小车上的遮光片通过A、B处所用的 时间;用遮光片通过光电门的平均速度表示小车通过A、B点时的速度,钩码上端为拉 力传感器,可读出细线上的拉力尸。适当垫高木板右端,使小车不挂钩码时能在长木板 上匀速运动。挂上钩码,从木
27、板右端由静止释放小车进行实验。(1) 符合本实验要求的有;A. 要保证钩码和拉力传感器的质量远小于小车的质量B. 要测出钩码和传感器的质量C要测量长木板垫起的高度和木板长度D.要选用宽度窄一些的挡光片(2) 某次实验中质量为m的小车通过A、B光电门的时间分别为tA、tB,则小车由A运动到B时动能的变化量Ek=;(3) 保持拉力F=0.2N不变,仅改变光电门B的位置,读出B到A的距离s,记录对应的S和tB数据,画出s-v2图像如图乙所示。根据图像可求得小车的质量m=kg,A处光电门到木板右端的距离L=m (不计小车的长度)。1 d2d 2【答案】:D m-一)0.60.32 t 2t 2BA【解
28、析】(1)AB.小车所受拉力可以由拉力传感器测出,不需要保证钩码和拉力传感器的质量远小于小车的质量,不需要测出钩码和传感器的质量,故AB错误;C. 把木板垫高的目的是平衡摩擦力,只要适当调整长木板的高度恰好平衡摩擦力即可, 不需要测量长木板垫起的高度和木板长度,故C错误;D. 用遮光片通过光电门的平均速度表示小车通过A、点时的速度,遮光片宽度越小, 平均速度越接近瞬时速度,为减小实验误差,要选用宽度窄一些的挡光片,故D正确。 故选 D。(2)小车经过光电门A时的速度为小车经过光电门 B 时的速度为小车由A运动到B动能变化量为AEk(3)对小车,由动能定理得已知F = 0.2N,整理得s - v
29、B图象的斜率图象的截距11=mv 2 一 mv 2 =2 B 2 A1d 2d2m(2t 2t 2BAFs =1 mv2 - mv22 B 2 As = 2.5mv2 一 2.5mv2BAk = 2.5m = 一 (一0.3) = 1.50.2解得小车质量为b= 一 2.5mv 2 = -0.3F 0.2 12a 2 x 3v2 = 0.2 , m = 0.6kg由牛顿第二定律得小车的加速度为a =m/s2 = m/s2m 0.63小车从O到A做初速度为零的匀加速直线运动,由匀变速直线运动的速度-位移公式得v2 = 2axOA间的距离为13.某实验小组的同学用如图所示的装置测量滑块与斜面间的动
30、摩擦因数卩。每次滑块 都从斜面上由静止开始下滑,测出滑块每次下滑时遮光板到光电门所在位置的距离L及 相应遮光时间t的值,已知遮光板的宽度为d。疗存”甘MM加仍皿加旳加決畑加疗(1)为测出滑块与斜面间的动摩擦因数卩,本实验还需要测出或知道的物理量是(填下列字母序号);A. 斜面的倾角。B. 当地的重力加速度gC. 滑块和遮光板的总质量m实验中测出了多组L和t的值,若要通过线性图象来处理数据求卩值,则应作出的图象为;(填下字母列序号);11A. 12 L图象B. L -图象C.- L图象D. L2 t图象tt 2(3) 在(2)作出的线性图象中,若直线的斜率为広则关于卩值的表达式为卩= (可用以上
31、物理量的符号表示,且忽略空气阻力);(4) 若考虑空气阻力,则他们利用第(3)题得到的表达式求出的动摩擦因数(选填“偏大”“偏小”或“没有影响”)。【答案】AB C 卩=tan0 - 山0 偏小2kg cos 0解析】:(1)滑块沿斜面做匀加速运动,受重力、支持力和摩擦力作用,根据动能定理,1(mgsin 0 一 卩mg cos0)L 二一mv22其中联立解得d2p = tan 0 2t 2Lg cos0故还需要测出或知道的物理量有斜面的倾角0和重力加速度go (2)由1(mgsin 0 一 ymg cos 0)L 二一mv22可变形为d22g(sin0-卩cos0) 12故L和1成线性关系故
32、应作出t2 - L图象。(3)由上式可知,斜率d 22g (sin 0 - p cos 0)可得d 22kg cos 0(4) 若考虑空气阻力,由(3)中推出的斜率k比实际值偏小,故求出的动摩擦因数比实际值偏小。14如图甲所示的实验装置,可用来探究物体在斜面上运动的加速度以及弹簧储存的弹 性势能。用到的实验器材有斜劈、弹簧(劲度系数较大)、带有遮光片的滑块(总质量 为m)、光电门、数字计时器(图中未画出)、游标卡尺、刻度尺。实验步骤如下:用游标卡尺测得遮光片的宽度为d 弹簧放在挡板P和滑块之间,当弹簧为原长时,遮光片中心对准斜面上的A点; 光电门固定于斜面上的B点,并与数字计时器相连; 压缩弹
33、簧,然后用销钉把滑块固定,此时遮光片中心对准斜面上的。点; 用刻度尺测量A、B两点间的距离厶 拔去锁定滑块的销钉,记录滑块经过光电门时数字计时器显示的时间&; 移动光电门位置,多次重复步骤11根据实验数据作出的-L图像为如图乙所示的一条直线,并测得 -L图像(At)2(At)2斜率为k、纵轴截距为b。乙1根据 L图像可求得滑块经过A位置时的速度vA二,滑块在斜面上运动的加速度a =。本实验中,使用的弹簧劲度系数较大,滑块从。到A恢复原长过程中,弹簧弹力远大于摩擦力和重力沿斜面的分量,则弹簧储存的弹性势能E =,E的测量值pP与真实值相比偏(填“大”或“小”)。【答案】djbkd 2mbd 22
34、【解析】:滑块从A到B做匀加速直线运动,设加速度为Q,由于宽度较小,时间很短,所以瞬时速度接近平均速度,因此有B点的速度为dv -B At根据运动学公式则有v2 一 v2 = 2aLBA化简为1At 2d2v2d2结合图象可得v 22ab = a , k -d 2d 2解得kd2a =2(2)由于弹簧弹力远大于摩擦力和重力沿斜面的分量,所以摩擦力和重力沿斜面的分量忽略不计,根据能量守恒可得=丄 mv 2 = mbd 22 A 2考虑摩擦力和重力沿斜面的分量,根据动能定理可得W + W - W =1 mv2N G f 2 A而Ep真休,摩擦力小于重力沿斜面的分量,Ep的测量值与真实值相比,测量值
35、偏大。15某实验小组用图1 实验装置探究合力做功与动能变化的关系。铁架台竖直固定放置在水平桌面上,将长木板倾斜放置,一端固定在水平桌面边缘P处,另一位置放置在铁 架台的铁杆上,忽略铁杆粗细,木板与铁杆接触处记为Q,P处放置一光电门。实验步骤是: 用游标卡尺测出滑块的挡光片宽度厶用天平测出滑块的质量m; 平衡摩擦力:以木板放置在水平桌面上的P处为轴,调节长木板在铁架台上的放置位 置,使滑块恰好沿木板向下做匀速运动。在铁架台竖直杆上记下此位置Q,用刻度尺 测出Q1到水平面的高度H保持P位置不变,长木板一端放置在铁架台竖直杆Q2上。用刻度尺量出QQ2的距离 勺,将滑块从木板上的Q2位置由静止释放,由
36、光电门计时器读出滑块的挡光时间“;保持P位置不变,重新调节长木板一端在铁架台上的放置位置,重复步骤数次。(1)滑块沿长木板由Q2运动到P的过程中,用测量的物理量回答下列问题(已知重力 加速度为 g):滑块动能的变化量口件= 滑块克服摩擦力做的功 Wf=合力对滑块做的功 W合=61Qi图2比曲门跑阳命初阿朋卯他加牌则阳敘加矗W 1(2)某学生以铁架台竖直杆上的放置位置到0的距离h为横坐标,以滑块通过光电门 的挡光时间的平方倒数1为纵坐标,根据测量数据在坐标中描点画出如图2所示直线, t2若图线过原点,且图线斜率k=,则能证明合外力做的功等于物体动能增量。答案】:mL22gmgHmgh2t21L21解析】:(1)滑块通过光电门的速度为Lv 二t1则滑块的动能的变化量为1mL2AE 二一mv2 二一k 22t 21设P点到铁架台的水平长度为d,滑块做匀速直线运动时,由动能定理可得mgH 一 卩mg cos 0dcos 0解得:卩mgd = mgH改变倾角后,克服摩擦力做的功为W =卩mg cos a -=卩mgd = mgHfcos a合外力做的功为W = mg (H + h ) W = mgh合 1 f 1(2)由上可知,合力做的功为 mgh ,根据动能定理可知mgh=丄 mv 22联立可得:丄=学t2 L2h 则图线的斜率k=
- 温馨提示:
1: 本站所有资源如无特殊说明,都需要本地电脑安装OFFICE2007和PDF阅读器。图纸软件为CAD,CAXA,PROE,UG,SolidWorks等.压缩文件请下载最新的WinRAR软件解压。
2: 本站的文档不包含任何第三方提供的附件图纸等,如果需要附件,请联系上传者。文件的所有权益归上传用户所有。
3.本站RAR压缩包中若带图纸,网页内容里面会有图纸预览,若没有图纸预览就没有图纸。
4. 未经权益所有人同意不得将文件中的内容挪作商业或盈利用途。
5. 装配图网仅提供信息存储空间,仅对用户上传内容的表现方式做保护处理,对用户上传分享的文档内容本身不做任何修改或编辑,并不能对任何下载内容负责。
6. 下载文件中如有侵权或不适当内容,请与我们联系,我们立即纠正。
7. 本站不保证下载资源的准确性、安全性和完整性, 同时也不承担用户因使用这些下载资源对自己和他人造成任何形式的伤害或损失。
