 汽车理论课后习题Matlab程序
汽车理论课后习题Matlab程序

《汽车理论课后习题Matlab程序》由会员分享,可在线阅读,更多相关《汽车理论课后习题Matlab程序(34页珍藏版)》请在装配图网上搜索。
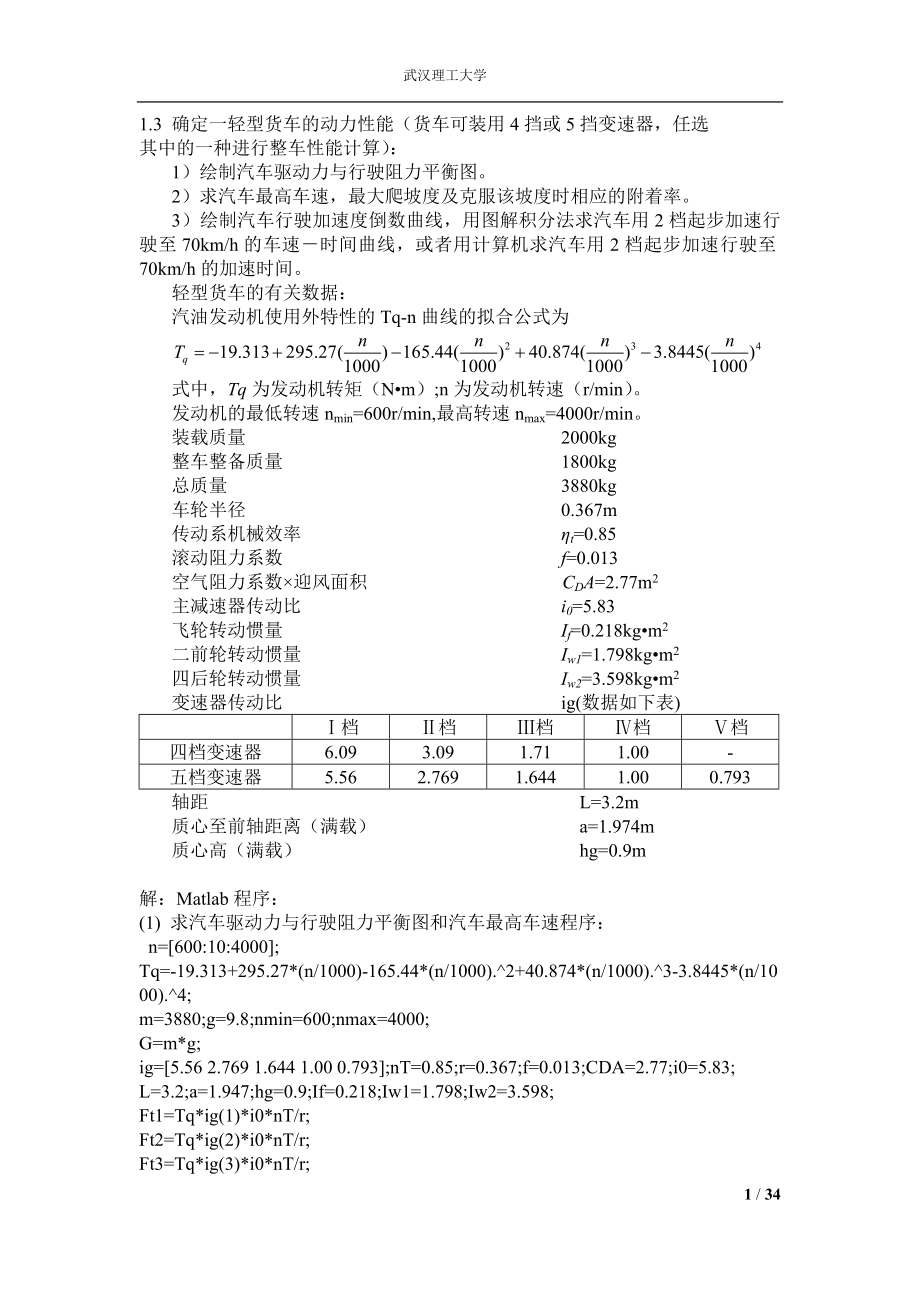
1、武汉理工大学1.3 确定一轻型货车的动力性能(货车可装用4挡或5挡变速器,任选其中的一种进行整车性能计算):1)绘制汽车驱动力与行驶阻力平衡图。2)求汽车最高车速,最大爬坡度及克服该坡度时相应的附着率。3)绘制汽车行驶加速度倒数曲线,用图解积分法求汽车用2档起步加速行驶至70km/h的车速时间曲线,或者用计算机求汽车用2档起步加速行驶至70km/h的加速时间。轻型货车的有关数据:汽油发动机使用外特性的Tq-n曲线的拟合公式为式中,Tq为发动机转矩(Nm);n为发动机转速(r/min)。发动机的最低转速nmin=600r/min,最高转速nmax=4000r/min。装载质量 2000kg整车整
2、备质量 1800kg总质量 3880kg车轮半径 0.367m传动系机械效率 t=0.85滚动阻力系数 f=0.013空气阻力系数迎风面积 CDA=2.77m2主减速器传动比 i0=5.83飞轮转动惯量 If=0.218kgm2二前轮转动惯量 Iw1=1.798kgm2四后轮转动惯量 Iw2=3.598kgm2变速器传动比 ig(数据如下表) 档档档档档四档变速器6.093.091.711.00-五档变速器5.562.7691.6441.000.793轴距 L=3.2m质心至前轴距离(满载) a=1.974m质心高(满载) hg=0.9m解:Matlab程序:(1) 求汽车驱动力与行驶阻力平衡
3、图和汽车最高车速程序: n=600:10:4000;Tq=-19.313+295.27*(n/1000)-165.44*(n/1000).2+40.874*(n/1000).3-3.8445*(n/1000).4;m=3880;g=9.8;nmin=600;nmax=4000;G=m*g;ig=5.56 2.769 1.644 1.00 0.793;nT=0.85;r=0.367;f=0.013;CDA=2.77;i0=5.83;L=3.2;a=1.947;hg=0.9;If=0.218;Iw1=1.798;Iw2=3.598;Ft1=Tq*ig(1)*i0*nT/r;Ft2=Tq*ig(2)
4、*i0*nT/r;Ft3=Tq*ig(3)*i0*nT/r;Ft4=Tq*ig(4)*i0*nT/r;Ft5=Tq*ig(5)*i0*nT/r;ua1=0.377*r*n/ig(1)/i0;ua2=0.377*r*n/ig(2)/i0;ua3=0.377*r*n/ig(3)/i0;ua4=0.377*r*n/ig(4)/i0;ua5=0.377*r*n/ig(5)/i0;ua=0:5:120;Ff=G*f;Fw=CDA*ua.2/21.15;Fz=Ff+Fw;plot(ua1,Ft1,ua2,Ft2,ua3,Ft3,ua4,Ft4,ua5,Ft5,ua,Fz);title(驱动力-行驶阻力平衡
5、图);xlabel(ua(km/s);ylabel(Ft(N);gtext(Ft1),gtext(Ft2),gtext(Ft3),gtext(Ft4),gtext(Ft5),gtext(Ff+Fw);zoom on;x,y=ginput(1);zoom off;disp(汽车最高车速=);disp(x);disp(km/h);汽车最高车速= 99.3006km/h(2)求汽车最大爬坡度程序:n=600:10:4000;Tq=-19.313+295.27*(n/1000)-165.44*(n/1000).2+40.874*(n/1000).3-3.8445*(n/1000).4;m=3880;g
6、=9.8;nmin=600;nmax=4000;G=m*g;ig=5.56 2.769 1.644 1.00 0.793;nT=0.85;r=0.367;f=0.013;CDA=2.77;i0=5.83;L=3.2;a=1.947;hg=0.9;If=0.218;Iw1=1.798;Iw2=3.598;Ft1=Tq*ig(1)*i0*nT/r;ua1=0.377*r*n/ig(1)/i0;Ff=G*f;Fw1=CDA*ua1.2/21.15;Fz1=Ff+Fw1;Fi1=Ft1-Fz1;Zoom on;imax=100*tan(asin(max(Fi1/G);disp(汽车最大爬坡度=);di
7、sp(imax);disp(%);汽车最大爬坡度=35.2197%(3)求最大爬坡度相应的附着率和求汽车行驶加速度倒数曲线程序:clearn=600:10:4000;Tq=-19.313+295.27*(n/1000)-165.44*(n/1000).2+40.874*(n/1000).3-3.8445*(n/1000).4;m=3880;g=9.8;nmin=600;nmax=4000;G=m*g;ig=5.56 2.769 1.644 1.00 0.793;nT=0.85;r=0.367;f=0.013;CDA=2.77;i0=5.83;L=3.2;a=1.947;hg=0.9;If=0.
8、218;Iw1=1.798;Iw2=3.598;Ft1=Tq*ig(1)*i0*nT/r;Ft2=Tq*ig(2)*i0*nT/r;Ft3=Tq*ig(3)*i0*nT/r;Ft4=Tq*ig(4)*i0*nT/r;Ft5=Tq*ig(5)*i0*nT/r;ua1=0.377*r*n/ig(1)/i0;ua2=0.377*r*n/ig(2)/i0;ua3=0.377*r*n/ig(3)/i0;ua4=0.377*r*n/ig(4)/i0;ua5=0.377*r*n/ig(5)/i0;Fw1=CDA*ua1.2/21.15;Fw2=CDA*ua2.2/21.15;Fw3=CDA*ua3.2/21
9、.15;Fw4=CDA*ua4.2/21.15;Fw5=CDA*ua5.2/21.15;Ff=G*f;deta1=1+(Iw1+Iw2)/(m*r2)+(If*ig(1)2*i02*nT)/(m*r2);deta2=1+(Iw1+Iw2)/(m*r2)+(If*ig(2)2*i02*nT)/(m*r2);deta3=1+(Iw1+Iw2)/(m*r2)+(If*ig(3)2*i02*nT)/(m*r2);deta4=1+(Iw1+Iw2)/(m*r2)+(If*ig(4)2*i02*nT)/(m*r2);deta5=1+(Iw1+Iw2)/(m*r2)+(If*ig(5)2*i02*nT)/(
10、m*r2);a1=(Ft1-Ff-Fw1)/(deta1*m);ad1=1./a1;a2=(Ft2-Ff-Fw2)/(deta2*m);ad2=1./a2;a3=(Ft3-Ff-Fw3)/(deta3*m);ad3=1./a3;a4=(Ft4-Ff-Fw4)/(deta4*m);ad4=1./a4;a5=(Ft5-Ff-Fw5)/(deta5*m);ad5=1./a5;plot(ua1,ad1,ua2,ad2,ua3,ad3,ua4,ad4,ua5,ad5);axis(0 99 0 10);title(汽车的加速度倒数曲线);xlabel(ua(km/h);ylabel(1/a);gtext(
11、1/a1);gtext(1/a2);gtext(1/a3);gtext(1/a4);gtext(1/a5);a=max(a1);af=asin(max(Ft1-Ff-Fw1)/G);C=tan(af)/(a/L+hg*tan(af)/L);disp(假设后轮驱动,最大爬坡度相应的附着率=);disp(C); 假设后轮驱动,最大爬坡度相应的附着率= 0.4219(4) clearnT=0.85;r=0.367;f=0.013;CDA=2.77;i0=5.83;If=0.218;Iw1=1.798;Iw2=3.598;L=3.2;a=1.947;hg=0.9;m=3880;g=9.8;G=m*g;
12、 ig=5.56 2.769 1.644 1.00 0.793;nmin=600;nmax=4000;u1=0.377*r*nmin./ig/i0;u2=0.377*r*nmax./ig/i0;deta=0*ig;for i=1:5 deta(i)=1+(Iw1+Iw2)/(m*r2)+(If*(ig(i)2*i02*nT)/(m*r2);endua=6:0.01:99;N=length(ua);n=0;Tq=0;Ft=0;inv_a=0*ua;delta=0*ua;Ff=G*f;Fw=CDA*ua.2/21.15;for i=1:N k=i; if ua(i)=u2(2) n=ua(i)*(
13、ig(2)*i0/r)/0.377; Tq=-19.313+295.27*(n/1000)-165.44*(n/1000)2+40.874*(n/1000)3-3.8445*(n/1000)4; Ft=Tq*ig(2)*i0*nT/r; inv_a(i)=(deta(2)*m)/(Ft-Ff-Fw(i); delta(i)=0.01*inv_a(i)/3.6; elseif ua(i)=u2(3) n=ua(i)*(ig(3)*i0/r)/0.377; Tq=-19.313+295.27*(n/1000)-165.44*(n/1000)2+40.874*(n/1000)3-3.8445*(n/
14、1000)4; Ft=Tq*ig(3)*i0*nT/r; inv_a(i)=(deta(3)*m)/(Ft-Ff-Fw(i); delta(i)=0.01*inv_a(i)/3.6; elseif ua(i) ginputans = 25.8223 70.0737 25.7467 70.0737所以汽车2档原地起步换挡加速行驶至70km/h的加速时间约为25.8s2.7已知货车装用汽油发动机的负荷特性与万有特性。负荷特性曲线的拟合公式为:其中,b为燃油消耗率g/(kWh);Pe为发动机净功率(kW);拟合式中的系数随转速n变化。怠速油耗(怠速转速400r/min)。计算与绘制题1.3中货车的1
15、)汽车功率平衡图。2)最高档与次高档的等速百公里油耗曲线。或利用计算机求货车按JB3352-83规定的六工况循环行驶的百公里油耗。计算中确定燃油消耗值b时,若发动机转速与负荷特性中给定的转速不相等,可由相邻转速的两根曲线用插值法求得。解:Matlab程序:(1) 汽车功率平衡图程序:clear n=600:10:4000;Tq=-19.313+295.27*(n/1000)-165.44*(n/1000).2+40.874*(n/1000).3-3.8445*(n/1000).4;m=3880;g=9.8;G=m*g;ig=5.56 2.769 1.644 1.00 0.793;nT=0.85
16、;r=0.367;f=0.013;CDA=2.77;i0=5.83;L=3.2;a=1.947;hg=0.9;If=0.218;Iw1=1.798;Iw2=3.598;ua1=0.377*r*n/ig(1)/i0;ua2=0.377*r*n/ig(2)/i0;ua3=0.377*r*n/ig(3)/i0;ua4=0.377*r*n/ig(4)/i0;ua5=0.377*r*n/ig(5)/i0;Pe1=Tq.*ig(1)*i0.*ua1./(3600*r);Pe2=Tq.*ig(2)*i0.*ua2./(3600*r);Pe3=Tq.*ig(3)*i0.*ua3./(3600*r);Pe4=T
17、q.*ig(4)*i0.*ua4./(3600*r);Pe5=Tq.*ig(5)*i0.*ua5./(3600*r);ua=0:0.35:119;Ff=G*f;Fw=CDA*ua.2/21.15;Pf=Ff*ua/3600;Pw=Fw.*ua/3600;Pe0=(Pf+Pw)./nT;Pe=max(Pe1);plot(ua1,Pe1,ua2,Pe2,ua3,Pe3,ua4,Pe4,ua5,Pe5,ua,Pe0,ua,Pe);axis(0 119 0 100);title(汽车功率平衡图);xlabel(ua(km/h);ylabel(Pe(kw);gtext(1),gtext(2),gtext
18、(3),gtext(4),gtext(5),gtext(Pf+Pw)/et),gtext(Pe);(2)最高档与次高档的等速百公里油耗曲线程序: clear n=600:1:4000;m=3880;g=9.8;G=m*g;ig=5.56 2.769 1.644 1.00 0.793;nT=0.85;r=0.367;f=0.013;CDA=2.77;i0=5.83;L=3.2;a=1.947;hg=0.9;If=0.218;Iw1=1.798;Iw2=3.598;n0=815 1207 1614 2012 2603 3006 3403 3804;B00=1326.8 1354.7 1284.4
19、1122.9 1141.0 1051.2 1233.9 1129.7;B10=-416.46 -303.98 -189.75 -121.59 -98.893 -73.714 -84.478 -45.291;B20=72.379 36.657 14.524 7.0035 4.4763 2.8593 2.9788 0.71113;B30=-5.8629 -2.0553 -0.51184 -0.18517 -0.091077 -0.05138 -0.047449 -0.00075215;B40=0.17768 0.043072 0.0068164 0.0018555 0.00068906 0.000
20、35032 0.00028230 -0.000038568;B0=spline(n0,B00,n);B1=spline(n0,B10,n);B2=spline(n0,B20,n); B3=spline(n0,B30,n);B4=spline(n0,B40,n);Ff=G*f;ua4=0.377*r*n/ig(4)/i0;ua5=0.377*r*n/ig(5)/i0;Fz4=Ff+CDA*(ua4.2)/21.15;Fz5=Ff+CDA*(ua5.2)/21.15;Pe4=Fz4.*ua4./(nT*3.6*1000);Pe5=Fz5.*ua5./(nT*3.6*1000);for i=1:1:
21、3401 b4(i)=B0(i)+B1(i)*Pe4(i)+B2(i)*Pe4(i).2+B3(i)*Pe4(i).3+B4(i)*Pe4(i).4;b5(i)=B0(i)+B1(i)*Pe5(i)+B2(i)*Pe5(i).2+B3(i)*Pe5(i).3+B4(i)*Pe5(i).4;endpg=7.0;Q4=Pe4.*b4./(1.02.*ua4.*pg); Q5=Pe5.*b5./(1.02.*ua5.*pg);plot(ua4,Q4,ua5,Q5);axis(0 100 10 30);title(最高档与次高档等速百公里油耗曲线);xlabel(ua(km/h);ylabel(百公里
22、油耗(L/100km));gtext(4),gtext(5); 3.1改变1.3题中轻型货车的主减速器传动比,做出为5.17、5.43、5.83、6.17、6.33时的燃油经济性加速时间曲线,讨论不同值对汽车性能的影响。解:Matlab程序: 主程序: i0=5.17,5.43,5.83,6.17,6.33; %输入主传动比的数据for i=1:1:5 y(i)=jiasushijian(i0(i); %求加速时间endy;for i=1:1:5 b(i)=youhao(i0(i); %求对应i0的六工况百公里油耗endb;plot(b,y,+r)hold onb1=linspace(b(1)
23、,b(5),100); y1=spline(b,y,b1); %三次样条插值plot(b1,y1); %绘制燃油经济性-加速时间曲线title(燃油经济性加速时间曲线);xlabel(百公里油耗(L/100km);ylabel(加速时间s);gtext(i0=5.17),gtext(i0=5.43),gtext(i0=5.83),gtext(i0=6.17),gtext(i0=6.33);子程序:(1) function y=jiasushijian(i0) %求加速时间的处理函数n1=linspace(0,5000); %先求各个档位的驱动力nmax=4000;nmin=600;r=0.36
24、7;yita=0.85;CDA=2.77;f=0.013;G=(3880)*9.8;ig=6.09,3.09,1.71,1.00;%i0=5.83for i=1:1:4 %i为档数 uamax(i)=chesu(nmax,r,ig(i),i0); %计算各个档位的最大速度与最小速度 uamin(i)=chesu(nmin,r,ig(i),i0); ua(i,:)=linspace(uamin(i),uamax(i),100); n(i,:)=zhuansu(ua(i,:),r,ig(i),i0); %计算各个档位的转速范围 Ttq(i,:)=zhuanju(n(i,:); %求出各档位的转矩范
25、围 Ft(i,:)=qudongli(Ttq(i,:),ig(i),i0,yita,r); %求出驱动力 F(i,:)=f*G+CDA*(ua(i,:).2)/21.15; %求出滚动阻力和空气阻力的和 delta(i,:)=1+(1.798+3.598+0.218*(ig(i)2)*(i02)*yita)/(3880*r2); %求转动质量换算系数 a(i,:)=1./(delta(i,:).*3880./(Ft(i,:)-F(i,:); %求出加速度 F2(i,:)=Ft(i,:)-F(i,:);end%下面分各个档位进行积分,求出加速时间 temp1(1,:)=ua(2,:)/3.6;
26、temp1(2,:)=1./a(2,:); n1=1; for j1=1:1:100 if ua(3,j1)max(ua(2,:)&ua(3,j1)max(ua(3,:)&ua(4,j1)=70; temp3(1,n2)=ua(4,j1)/3.6; temp3(2,n2)=1./a(4,j1); n2=n2+1; end endy=temp1(1,1)*temp1(2,1)+qiuji(temp1(1,:),temp1(2,:)+qiuji(temp2(1,:),temp2(2,:)+qiuji(temp3(1,:),temp3(2,:);end(2) function ua=chesu(n,
27、r,ig,i0); %由转速计算车速ua=0.377*r.*n/(ig*i0);(3) function n=zhuansu(ua,r,ig,i0); %求转速n=ig*i0.*ua./(0.377*r);end(4) function y=zhuanju(n); %求转矩函数y=-19.313+295.27.*(n./1000)-165.44.*(n./1000).2+40.874.*(n./1000).3-3.8445.*(n./1000).4;(5) function y=qudongli(Ttq,ig,i0,yita,r); %求驱动力函数y=(ig*i0*yita.*Ttq)/r;e
28、nd(6) function p=qiuji(x0,y0) %求积分函数n0=size(x0);n=n0(2);x=linspace(x0(1),x0(n),200);y=spline(x0,y0,x); %插值% figure;plot(x,y);p=trapz(x,y) ;end(7) %求不同i0下的六工况油耗function b=youhao(i0);global f G CDA yita m r If Iw1 Iw2 pg B0 B1 B2 B3 B4 n %声明全局变量ig=6.09,3.09,1.71,1.00;r=0.367;yita=0.85;CDA=2.77;f=0.013
29、;%i0=5.83;G=(3880)*9.8;If=0.218;Iw1=1.798;Iw2=3.598;m=3880; %汽车的基本参数设定n0=815 1207 1614 2012 2603 3006 3403 3804;B00=1326.8 1354.7 1284.4 1122.9 1141.0 1051.2 1233.9 1129.7;B10=-416.46 -303.98 -189.75 -121.59 -98.893 -73.714 -84.478 -45.291;B20=72.379 36.657 14.524 7.0035 4.4763 2.8593 2.9788 0.71113
30、;B30=-5.8629 -2.0553 -0.51184 -0.18517 -0.091077 -0.05138 -0.047449 -0.00075215;B40=0.17768 0.043072 0.0068164 0.0018555 0.00068906 0.00035032 0.00028230 -0.000038568;n=600:1:4000;B0=spline(n0,B00,n);B1=spline(n0,B10,n);B2=spline(n0,B20,n); %使用三次样条插值,保证曲线的光滑连续B3=spline(n0,B30,n);B4=spline(n0,B40,n);
31、ua4=0.377*r.*n./(i0*ig(4); %求出发动机转速范围内对应的III、IV档车速F4=f*G+CDA*(ua4.2)/21.15; %求出滚动阻力和空气阻力的和P_fw4=F4.*ua4./(yita*3.6*1000); %求出阻力功率for i=1:1:3401 %用拟合公式求出各个燃油消耗率b4(i)=B0(i)+B1(i)*P_fw4(i)+B2(i)*(P_fw4(i)2+B3(i)*(P_fw4(i)3+B4(i)*(P_fw4(i)4;endpg=7.06; %汽油的重度取7.06N/Lua4_m=25,40,50; %匀速阶段的车速s_m=50,250,25
32、0; %每段匀速走过的距离b4_m=spline(ua4,b4,ua4_m); %插值得出对应速度的燃油消耗率F4_m=f*G+CDA*(ua4_m.2)/21.15; %车速对应的阻力P_fw4_m=F4_m.*ua4_m./(yita*3.6*1000); %发动机功率Q4_m=P_fw4_m.*b4_m.*s_m./(102.*ua4_m.*pg) ; Q4_a1=jiasu(40,25,ig(4),0.25,ua4,i0);Q4_a2=jiasu(50,40,ig(4),0.2,ua4,i0);Qid=0.299;tid=19.3;s=1075; Q_i=Qid*tid; %求出减速阶
33、段的燃油消耗量 Q4all=(sum(Q4_m)+Q4_a1+Q4_a2+Q_i)*100/s; %IV档六工况百公里燃油消耗量b=Q4all;(8)加速阶段处理函数function q=jiasu(umax,umin,ig,a,ua0,i0);global f G CDA yita m r If Iw1 Iw2 pg B0 B1 B2 B3 B4 n; %i0 ;ua1=umin:1:umax; %把速度范围以1km/h为间隔进行划分delta=1+(Iw1+Iw2)/(m*r2)+(If*ig2*i02*yita)/(m*r2); P0=(G*f.*ua0./3600+CDA.*ua0.3
34、/76140+(delta*m.*ua0/3600)*a)/yita;P=(G*f.*ua1/3600+CDA.*ua1.3/76140+(delta*m.*ua1/3600)*a)/yita;dt=1/(3.6*a) ; %速度每增加1km/h所需要的时间for i=1:1:3401 %重新利用拟合公式求出b与ua的关系 b0(i)=B0(i)+B1(i)*P0(i)+B2(i)*(P0(i)2+B3(i)*(P0(i)3+B4(i)*(P0(i)4;endb1=interp1(ua0,b0,ua1); %插值出各个速度节点的燃油消耗率Qt=P.*b1./(367.1.*pg); %求出各个
35、速度节点的燃油消耗率i1=size(Qt); i=i1(2);Qt1=Qt(2:i-1);q=(Qt(1)+Qt(i)*dt./2+sum(Qt1)*dt; %求该加速阶段的燃油消耗量4.3一中型货车装有前后制动器分开的双管路制动系,其有关参数如下:载荷质量(kg)质心高hg/m轴距L/m质心至前轴距离a/m制动力分配系数空载40800.8453.9502.1000.38满载92901.1703.9502.9500.381) 计算并绘制利用附着系数曲线和制动效率曲线2) 求行驶车速Ua30km/h,在0.80路面上车轮不抱死的制动距离。计算时取制动系反应时间0.02s,制动减速度上升时间0.0
36、2s。3) 求制动系前部管路损坏时汽车的制动距离s,制动系后部管路损坏时汽车的制动距离。解:Matlab程序:(1) 求利用附着系数曲线和制动效率曲线程序: clear k=4080;hgk=0.845;Lk=3.950;ak=2.10;betak=0.38;bk=Lk-ak;%空载时的参数mm=9290;hgm=1.170;Lm=3.950;am=2.950;betam=0.38;bm=Lm-am;%满载时的参数z=0:0.01:1.0;figure(1);fai=z;fai_fk=betak*z*Lk./(bk+z*hgk);%空载时前轴的ffai_fm=betam*z*Lm./(bm+z
37、*hgm);%满载时前轴的ffai_rk=(1-betak)*z*Lk./(ak-z*hgk);%空载时后轴的rfai_rm=(1-betam)*z*Lm./(am-z*hgm);%满载时后轴的rplot(z,fai_fk,b-,z,fai_fm,r,z,fai_rk,b-,z,fai_rm,r,z,fai,k);title(利用附着系数与制动强度的关系曲线);xlabel(制动强度(z/g);ylabel(利用附着系数);gtext(r(空载),gtext(r(满载),gtext(=z),gtext(f(空载),gtext(f(满载);figure(2);Efk=z./fai_fk*100;
38、%空载时前轴的制动效率Efm=z./fai_fm*100;Erk=z./fai_rk*100;Erm=z./fai_rm*100;plot(fai_fk,Efk,b,fai_fm,Efm,r,fai_rk,Erk,b,fai_rm,Erm,r);axis(0 1 0 100);title(前.后制动效率曲线);xlabel(附着系数);ylabel(制动效率%);gtext(Ef),gtext(Er),gtext(Er),gtext(满载),gtext(空载);(2) 问和(3)问程序: clearmk=4080;hgk=0.845;Lk=3.950;ak=2.10;betak=0.38;bk
39、=Lk-ak;%空载时的参数mm=9290;hgm=1.170;Lm=3.950;am=2.950;betam=0.38;bm=Lm-am;%满载时的参数z=0:0.01:1;fai_fk=betak*z*Lk./(bk+z*hgk);%空载时前轴的ffai_fm=betam*z*Lm./(bm+z*hgm);%满载时前轴的ffai_rk=(1-betak)*z*Lk./(ak-z*hgk);%空载时后轴的rfai_rm=(1-betam)*z*Lm./(am-z*hgm);%满载时后轴的rEfk=z./fai_fk*100;%空载时前轴的制动效率Efm=z./fai_fm*100;Erk=z
40、./fai_rk*100;Erm=z./fai_rm*100; t1=0.02;t2=0.02;ua0=30;fai=0.80;g=9.8;ak1=Erk(81)*g*fai/100;am1=Erm(81)*g*fai/100;Sk1=(t1+t2/2)*ua0/3.6+ua02/(25.92*ak1);%制动距离Sm1=(t1+t2/2)*ua0/3.6+ua02/(25.92*am1);disp(空载时,汽车制动距离Sk1=);disp(Sk1);disp(满载时,汽车制动距离Sm1=);disp(Sm1);ak2=fai*g*ak/(Lk+fai*hgk);am2=fai*g*am/(L
41、m+fai*hgm);ak3=fai*g*bk/(Lk-fai*hgk);am3=fai*g*bm/(Lk-fai*hgm);Sk2=(t1+t2/2)*ua0/3.6+ua02/(25.92*ak2);%制动距离Sm2=(t1+t2/2)*ua0/3.6+ua02/(25.92*am2);Sk3=(t1+t2/2)*ua0/3.6+ua02/(25.92*ak3);Sm3=(t1+t2/2)*ua0/3.6+ua02/(25.92*am3);disp(空载时,前制动器损坏,汽车制动距离Sk2=);disp(Sk2);disp(满载时,前制动器损坏,汽车制动距离Sm2=);disp(Sm2);
42、disp(空载时,后制动器损坏,汽车制动距离Sk3=);disp(Sk3);disp(满载时,后制动器损坏,汽车制动距离Sm3=);disp(Sm3); 空载时,汽车制动距离Sk1= 7.8668满载时,汽车制动距离Sm1= 5.6354空载时,前制动器损坏,汽车制动距离Sk2= 10.0061满载时,前制动器损坏,汽车制动距离Sm2= 7.5854空载时,后制动器损坏,汽车制动距离Sk3= 8.0879满载时,后制动器损坏,汽车制动距离Sm3= 13.59865.11二自由度轿车模型的有关参数如下: 总质量 m=1818.2kg绕Oz轴转动惯量 轴距 L=3.048m质心至前轴距离 a=1.
43、463m质心至后轴距离 b=1.585m前轮总侧偏刚度 k1=-62618N/rad后轮总侧偏刚度 k2=-110185N/rad转向系总传动比 i=20试求:1) 稳定性因数K、特征车速uch。2) 稳态横摆角速度增益曲线、车速u=22.35m/s时的转向灵敏度。3) 静态储备系数S.M.,侧向加速度为0.4g时的前、后轮侧偏角绝对值之差与转弯半径的比值R/R0(R0=15m)。4) 车速u=30.56m/s时,瞬态响应的横摆角速度波动的固有(圆)频率、阻尼比、反应时间与峰值反应时间解:Matlab程序: m=1818.2;Iz=3885;L=3.048;a=1.463;b=1.585;k1
44、=-62618;k2=-110185;i=20;g=9.8;R0=15;u1=30.56;K=m*(a/k2-b/k1)/L2;Uch=(1/K)(1/2);%特征车速disp(稳定性因数(s2/m2)K=);disp(K);disp(特征车速(m/s)Uch=);disp(Uch);u=0:0.05:30;S=u./(L*(1+K*u.2);%稳态横摆角速度增益plot(u,S);title(汽车稳态横摆角速度增益曲线);xlabel(车速u(m/s);ylabel(稳态横摆角速度增益);disp(u=22.35m/s时,转向灵敏度为);disp(S(448);SM=k2/(k1+k2)-a
45、/L;ay=0.4*g;A=K*ay*L;B=L/R0;R=L/(B-A);C=R/R0;%转弯半径比disp(静态储备系数S.M.=);disp(SM);disp(侧向加速度为0.4g时前、后轮侧偏角绝对值之差(rad) a1-a2=);disp(A);disp(侧向加速度为0.4g时转弯半径比值R/R0=);disp(C);W0=L/u1*(k1*k2/(m*Iz)*(1+K*u12)(1/2);%固有(圆)频率D=(-m*(k1*a2+k2*b2)-Iz*(k1+k2)/(2*L*(m*Iz*k1*k2*(1+K*u12)(1/2);%阻尼比t=atan(1-D2)(1/2)/(-m*u
46、1*a*W0/(L*k2)-D)/(W0*(1-D2)(1/2);%反应时间E=atan(1-D2)(1/2)/D)/(W0*(1-D2)(1/2)+t;%峰值反应时间disp(车速u=30.56m/s时的瞬态响应参数分别为:);disp(横摆角速度波动的固有(圆)频率(rad)为 );disp(W0);disp(阻尼比为);disp(D);disp(反应时间(s)为);disp(t);disp(峰值反应时间(s)为);disp(E);稳定性因数(s2/m2)K=0.0024特征车速(m/s)Uch=20.6053u=22.35m/s时,转向灵敏度为3.3690静态储备系数S.M.=0.157
47、6侧向加速度为0.4g时前、后轮侧偏角绝对值之差(rad) a1-a2=0.0281侧向加速度为0.4g时转弯半径比值R/R0=1.1608车速u=30.56m/s时的瞬态响应参数分别为:横摆角速度波动的固有(圆)频率(rad)为5.5758阻尼比为0.5892反应时间(s)为0.1811峰值反应时间(s)为0.38996.5车身-车轮双质量系统参数:。 “人体-座椅”系统参数:。车速,路面不平度系数,参考空间频率n0=0.1m-1。 计算时频率步长,计算频率点数。1) 计算并画出幅频特性、和均方根值谱、谱图。进一步计算值2) 改变“人体-座椅”系统参数:。分析值随的变化。3) 分别改变车身-
48、车轮双质量系统参数:,。绘制三个响应量均方根值随以上四个系统参数变化的曲线。 解:Matlab程序(1)问yps=0.25;%阻尼比gama=9;%刚度比mu=10;%质量比fs=3;ypss=0.25;g=9.8;a0=10(-6);f0=1.5; ua=20;Gqn0=2.56*10(-8);n0=0.1;detaf=0.2;N=180;f=detaf*0:N;lamta=f/f0;lamtas=f/fs;Wf=0*f;deta=(1-lamta.2).*(1+gama-1/mu*lamta.2)-1).2+4*yps2*lamta.2.*(gama-(1/mu+1)*lamta.2).2
49、;z1_q=gama*sqrt(1-lamta.2).2+4*yps2*lamta.2)./deta);z2_z1=sqrt(1+4*yps2*lamta.2)./(1-lamta.2).2+4*yps2*lamta.2);p_z2=sqrt(1+(2*ypss*lamtas).2)./(1-lamtas.2).2+(2*ypss*lamtas).2);z2_q=gama*sqrt(1+4*yps2*lamta.2)./deta);p_q=p_z2.*z2_q;jfg_Gqddf=4*pi2*sqrt(Gqn0*n02*ua)*f;jfg_Gzdd1f=z1_q.*jfg_Gqddf;jfg_
50、Gzdd2f=z2_q.*jfg_Gqddf;jfg_Gaf=p_q.*jfg_Gqddf;sigmaqdd=sqrt(trapz(f,jfg_Gqddf.2);%路面不平度加速度均方根值sigmazdd1=sqrt(trapz(f,jfg_Gzdd1f.2);%车轮加速度均方根值sigmazdd2=sqrt(trapz(f,jfg_Gzdd2f.2);%车身加速度均方根值sigmaa=sqrt(trapz(f,jfg_Gaf.2);%人体加速度均方根值for i=1:(N+1) if f(i)=2 Wf(i)=0.5; elseif f(i)=4 Wf(i)=f(i)/4; elseif f
51、(i)=12.5 Wf(i)=1; else Wf(i)=12.5/f(i); endendkk=Wf.2.*jfg_Gaf.2;aw=sqrt(trapz(f,kk);%加权加速度均方根值Law=20*log10(aw/a0);%加权振级disp(路面不平度加速度均方根值为);disp(sigmaqdd);disp(车轮加速度均方根值为);disp(sigmazdd1);disp(车身加速度均方根值为);disp(sigmazdd2);disp(人体加速度均方根值为);disp(sigmaa);disp(加权加速度均方根值为);disp(aw);disp(加权振级);disp(Law);fi
52、gure(1)plot(f,z1_q),title(幅频特性|z1/q|, (f=1.5Hz, =0.25,=9,=10),xlabel(激振频率f/Hz),ylabel(|z1/q|);figure(2)plot(f,z2_z1),title(幅频特性|z2/z1|,(f=1.5Hz, =0.25,=9,=10),xlabel(激振频率f/Hz),ylabel(|z2/z1|);figure(3)plot(f,p_z2),title(幅频特性|p/z2|,(fs=1.5Hz, s=0.25),xlabel(激振频率f/Hz),ylabel(|p/z2|);figure(4)plot(f,jf
53、g_Gzdd1f),title(车轮加速度均方根值Gz1(f)谱图),xlabel(激振频率f/Hz),ylabel(Gz1(f);figure(5)plot(f,jfg_Gzdd2f),title(车身加速度均方根值Gz2(f)谱图),xlabel(激振频率f/Hz),ylabel(Gz2(f);figure(6)plot(f,jfg_Gaf),title(人体加速度均方根值Ga(f)谱图),xlabel(激振频率f/Hz),ylabel(Ga(f);路面不平度加速度均方根值为 0.3523车轮加速度均方根值为 0.2391车身加速度均方根值为 0.0168人体加速度均方根值为 0.0161加权加速度均方根值为 0.0100加权振级 80.0291(2)问程序1:cleargama=9;%刚度比mu=10;%质量比f0=1.5;
- 温馨提示:
1: 本站所有资源如无特殊说明,都需要本地电脑安装OFFICE2007和PDF阅读器。图纸软件为CAD,CAXA,PROE,UG,SolidWorks等.压缩文件请下载最新的WinRAR软件解压。
2: 本站的文档不包含任何第三方提供的附件图纸等,如果需要附件,请联系上传者。文件的所有权益归上传用户所有。
3.本站RAR压缩包中若带图纸,网页内容里面会有图纸预览,若没有图纸预览就没有图纸。
4. 未经权益所有人同意不得将文件中的内容挪作商业或盈利用途。
5. 装配图网仅提供信息存储空间,仅对用户上传内容的表现方式做保护处理,对用户上传分享的文档内容本身不做任何修改或编辑,并不能对任何下载内容负责。
6. 下载文件中如有侵权或不适当内容,请与我们联系,我们立即纠正。
7. 本站不保证下载资源的准确性、安全性和完整性, 同时也不承担用户因使用这些下载资源对自己和他人造成任何形式的伤害或损失。
最新文档
- 高中物理-第3章-专题-弹力摩擦力综合问题及物体的受力分析ppt课件-新人教版必修1
- 高中英语外研版选修六ppt课件:Module+2+Section+Ⅰ+Introduction+&+Reading+—+Pre-reading
- 高中英语外研版必修三ppt课件:Module+4+Section+Ⅴ+Writing—+环保类作文
- 高中英语必修4-Unit-2-Working-the-landppt课件
- 《高等石油地质》复习资料--课件
- 高中英语人教选修6ppt课件:Unit-3-Section-Ⅱ
- 高中信息技术基础《初识冒泡排序》优质课教学ppt课件
- 高中议论文语段训练修改ppt课件
- 高中英语必修五人教版ppt课件:Unit-3-Period-Three
- 党课ppt课件信仰的力量精编版
- 蔬果变变变课件
- 中央空调系统构成和设备配置课件
- 促进身心健康课件-人教课标版
- 传出神经系统药理---课件
- 一年级数学10的分与合课件
