 伺服驱动器外部接线及说明
伺服驱动器外部接线及说明

《伺服驱动器外部接线及说明》由会员分享,可在线阅读,更多相关《伺服驱动器外部接线及说明(16页珍藏版)》请在装配图网上搜索。
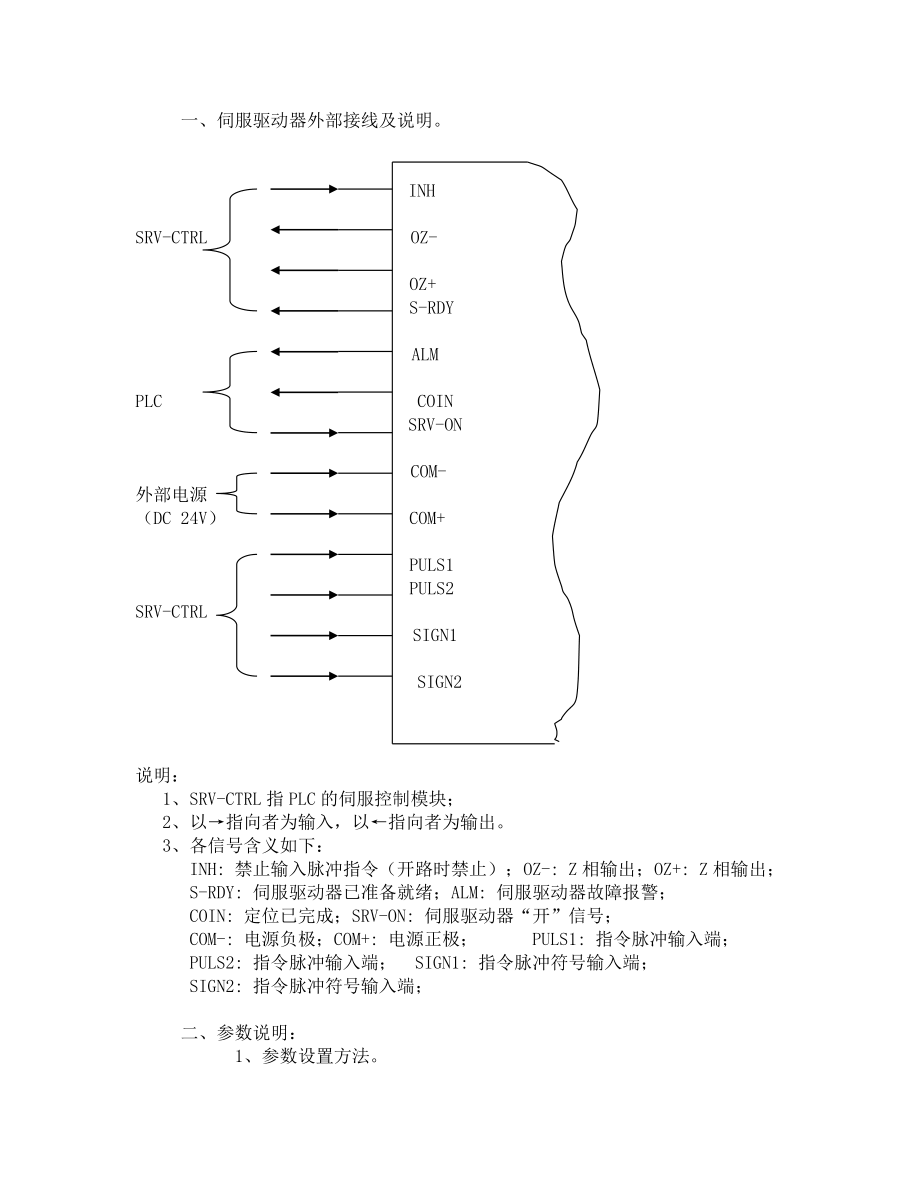
1、一、 伺服驱动器外部接线及说明。 INHSRV-CTRLOZ-OZ+S-RDYALMPLC COINSRV-ONCOM-外部电源(DC 24V)COM+PULS1PULS2SRV-CTRLSIGN1 SIGN2说明:1、 SRV-CTRL指PLC的伺服控制模块;2、 以指向者为输入,以指向者为输出。3、 各信号含义如下:INH: 禁止输入脉冲指令(开路时禁止);OZ-: Z相输出;OZ+: Z相输出;S-RDY: 伺服驱动器已准备就绪;ALM: 伺服驱动器故障报警;COIN: 定位已完成;SRV-ON: 伺服驱动器“开”信号;COM-: 电源负极;COM+: 电源正极; PULS1: 指令脉冲
2、输入端;PULS2: 指令脉冲输入端; SIGN1: 指令脉冲符号输入端;SIGN2: 指令脉冲符号输入端;二、 参数说明:1、 参数设置方法。操作面板上共有5个按键,意义如下: MODE:模式转换键,按此键可在4个模式间切换,这4个模式是:DP-: 选择监视项目(共有7个, 在按 MODE键显示 DP-后先按SET,再按或选择)、DP-EPS: 位置偏差; 、DP-SPD: 转速;、DP-TRQ: 转矩; 、DP-CNT: 控制方式;、DP-IO: 输入输出信号状态; 、DP-ERR: 错误信息;、DP_NO: PR-: 设定参数。 EE-: 写入参数。 AT-: 自动增益调整。 SET:为
3、设定及确认键。 :数值增加或移动到下一个选项; :数值减少或移动到上一个选项; :数位间移动; 具体设置步骤详见 有关Driver的补充信息2、 参数含义(旧Driver)参数号含义相关控制方式设定范围出厂设定新Driver对应参数00轴名T.S.P0900001LED初始显示的信息T.S.P0200102(#)控制方式设定T.S.P0510203速度环增益T.S.P253500*1104速度环PID控制的积分时间常数T.S.P11000(ms)*1205速度检测噪声过滤器T.S.P0441306转矩输出允许超限范围T.S.P0400(%)*5E07转矩限制信号(模拟量输入信号)无效S.P0/
4、110308速度/位置偏差值与输出模拟电压对应关系T.S.P0300709CW、CCW禁止驱动信号(输入)无效T.S.P0/11040ACW、CCW禁止驱动时DB不动作T.S.P0300B反馈脉冲(输出)分频分子T.S.P1100001790C反馈脉冲(输出)分频分母T.S.P11000017A0D反馈脉冲(输出)B相脉冲与Z相脉冲、A相脉冲的关系T.S.P0304510加减速时间S05000058/5912到达速度T.S010000(r/min)10006213速度指令(输入)增益T.S1026002255014速度指令(输入)逻辑取反T.S0/105115速度指令(输入)零漂调整T.S-1
5、2712705216速度设定内外转换T.S0/100517零速箝位无效T.S0/110618速度设定第一速T.S-700070000531A转矩设定信号(输入)增益T2525002505C1B转矩指令(输入)逻辑取反T0/105D1C转矩指令(输入)零漂调整T-12712701D转矩指令过滤器器时间常数T.S.P02500020位置环增益P101000(1/s)*1021速度前馈P0100(%)01522定位完成信号确定范围P032766(脉冲)106023位置偏差过大范围P03276630006324位置偏差过大设定无效P0/106425指令脉冲(输入)分倍频分子P1100001000046
6、26指令脉冲(输入)分倍频分母P110000100004B27指令脉冲(输入)倍频倍率P1444028指令脉冲逻辑取反P0304129指令脉冲(输入)方式P031422B前馈滤波器时间常数P0640001630伺服电机极数这些参数是与电机及Driver直接相关的,一般不允许改变。31脉冲编码器设定32J/T比33电流PID控制比例增益34电流PID控制积分增益35过速度范围36最大输出转矩设定37过载时间设定38过载范围设定说明:1、 参数号码后加“#“者为需要更改的,如02号参数实际应用中应设为0;2、 控制方式含义T:转矩控制S:速度控制P:位置控制3、 出厂设定为”*”者为出厂时未设置,
7、需根据实际自行设置;4、 其余参数可使用出厂设置;5、 最后一栏为新Driver与之对应的参数(有些没有);6、 更详细的说明参见Driver手册(旧)或参考Driver手册(新)中对应的参数;7、 以下表格为Driver实际参数设置表。 参数号V-AXISZ-AXISy-AXISx-AXISY-AXISX-AXIS 000000000111111102000000035003503504002002000441077101005040000064003003003003003000711111108000000091111110A0000000B10000100001000010000100
8、00100000C1000010000100001000010000100000D0000000F16384163841638416384163841638410000000121000100010001000100010001322522522522522522514000000150000001600000017111111180000001A2502502502502502501B0000001C0000001D0000001F168981689816898168981689816898203002003003002002002100000022101010101010233000030
9、00030000300003000030000240000002510000100001000010000100001000026100001000010000100005000100002744444428000000291111112B0000002E-32767-3276711112F1331213312133121331213312133123044444431101010101010321720262626263350501001001001003466555535600060006000600060006000364003003003003003003750050010001000
10、10001000381151151151151151153F245762457624576245762457624576 Driver参数设置表 参数号Z-Axis参数号Z-Axis 00144250001145002046100000314710000041481000005049100000604A00734B100000804C10904D00A1505000B15100C25200D253010505401110055012505601345730014505801505901605A018505C30191005D01A505E3001B460101C5061501D15006210
11、001E26318751F864020100651210660222670231006803006903106A03206B03306C034070103507103607210370731038074100003907503A076100003B07713C07803D079100004047A100004107D304217E6254317F0 新Driver参数设置表 三、故障代码含义及相应处理 伺服驱动器具有较强的保护及自诊断功能,当驱动器本身或与之相连的伺服电机、脉冲编码器发生故障时,它会给出一个故障代码指出相关的故障种类及处理方法,详见下表:(旧Driver)代码保护机能原因相关处
12、理12过电压电机刹车时因为再生发电制动而使斩波回路电压过高。1、 将加减速时间加长;2、 更换合适的制动电阻;3、 更换驱动器。13欠电压1、 瞬时停电;2、 电源容量不足;3、 电源电压不足;1、 加大电源容量;2、 提高电源电压。14过电流由于以下原因导致逆变部分电流过大:1、 输出短路;2、 输出接地;3、 逆变元件损坏;4、 电机匝间短路;5、 电机与Driver不匹配;1、 检查线路;2、 检查电机;3、 更换Driver。16过载当输出电流超过额定电流时,其所持续的时间超过驱动器的反时限保护时间。(*)1、 将加减速时间加长;2、 调整负荷;3、 更换Driver使之与电机匹配。2
13、2脉冲编码器异常1、 编码器坏;2、 连线坏。1、 更换编码器;2、 检查接线。24位置偏差过大位置偏差数(脉冲)大于23号参数所设定的值。1、 检查电机设定位移与实际位移是否有误差;2、 检查电机输出转矩是否饱和;3、 检查各增益的设定值。4、 将转矩限制(06号参数值)设到最大;5、 检查加减速时间、负荷及电机运行速度。29偏差计数器溢出位置偏差计数器值超过上限(134217728)同上26过速度保护电机运行速度超过35号参数规定的值1、 减小速度指令(输入)值;2、 减小速度指令(输入)增益(13号参数);3、 减小速度指令(输入)分倍频,即调整25、26号参数。38禁止驱动信号(输入)
14、异常CW、CCW禁止驱动信号(输入)都断开。1、 检查这两个输入信号;2、 检查Driver的控制电压是否为直流1224V。27指令脉冲分倍频保护由于25、26号参数设置不当,使指令脉冲分倍频后大于500kpps调整25、26号参数。36EEPROM异常EEPROM中参数混乱重新输入参数84参数传递异常关机后再开机,如故障依然存在,更换相关的部件。98系统异常23DSP异常30CPU异常99其它异常说明:1、 反时限保护:对于电机来讲,其所允许流过的电流和时间是成反比例关系的,即流过的电流越大,那末允许通电的时间就越短,这种特性称为反时限特性。2、 此表仅适用于旧的Driver,新的 Driv
15、er请参阅相关手册。有关Driver的补充信息 Driver 有两种类型:1、接受增量式编码器的信号;2、接受绝对编码器的信号。这一点从其型号可以看出: MSD A 3A 1 A 1 A 特殊型号 设计顺位2:A,B标准 设计顺位1:1:标准 2:非标准 编码器型式 A,C,D 电源电压:1、单相100V 2、单相200V 3、三相200V 5、单/三相200V 使用电机额定输出 序列号使用电机型号相应地,伺服电机也有两种型号:1、配增量式脉冲编码器;2、配绝对式脉冲编码器。这一点从其型号也可以看出来。 MSM A 02 2 A 1 A 特殊型号 电机构造 设计顺位1:1、标准 2、非标准 编
16、码器型式 A ,C,D 电源电压:1、100V 2、200V Z、100/200V 使用电机额定输出 序列号主型号 Driver与伺服电机必须配套使用,即1型Driver 配1型电机,2型Driver 配2型电机。 然而,2型Driver 配2型电机时,虽然编码器类型是绝对脉冲编码器,但是可以通过设定参数,将其作为增量式脉冲编码器使用,这样做有什么意义呢? 可以这样理解:伺服控制是由伺服控制模块、Driver、伺服电机三者共同完成的,在Driver上有三组向伺服控制模块输送的脉冲信号(也是A,B,Z相脉冲),这是将来自脉冲编码器的信号经过变换而得到的,由于实际使用中参数设置的关系,这三个信号与
17、实际的脉冲编码器信号是一样的,它送往PLC伺服控制模块作为控制用。当我们使用绝对脉冲编码器时,由于绝对脉冲编码器向Driver只提供一组信号,而PLC伺服控制模块需要三组信号,所以只能通过Driver内部变换而得到这三组信号。(在本例中Driver只向伺服控制模块提供Z相信号) 下图为增量式脉冲编码器的接线图:11黄5 Z 0+5V RX A B A Z Z 中继CN CN-SIG 橙 126 Z 黄绿 943+5V 0 RX A A B B B蓝 10 红 71 815 FG FG14131211 RX RX+5V2粉红水 17紫 18白 4黑 2 3 1 020 增量式脉冲编码器 屏蔽层
18、注: 表示双绞线 在数字信号的传输中,为防止噪音干扰,常使用屏蔽电缆,并做到可靠接地,通常依照以下几点进行:1、 信号线屏蔽层一端与端子排上的接地端子相连,另一端与脉冲编码器内部的接地端子相连,即两端都要接地;2、 成对的信号线采用双绞,可有效地防止干扰;3、 信号电缆与主电缆分开敷设;4、 信号地(FG 或SG)与保护地(PE)不要共用一个接地点。 下图为绝对脉冲编码器的接线图: 红 51BATT+ 0+5V SD 3.6VG 中继 CN CN-SIG3.6V+ 粉红 62BATT- 水 1754+5V 0 RX/TX RX/TX SD 紫 18320 FG FG7 +5V 4白黑8 2 3
19、 1 0 绝对脉冲编码器 屏蔽层说明:1、 此脉冲编码器与相应的Driver(新)配合使用时,可将其设定为增量式脉冲编码器或绝对脉冲编码器(通过参数Pr 0B 设定);2、 当将其设定为绝对脉冲编码器时,需将编码器内部的后备电源线接至Driver上(图中蓝色粗实线);3、 当将其设定为增量式脉冲编码器时,后备电源线可不接。 后备电源线:从脉冲编码器内部引出,接到外部独立的电源(一般为电池,以保证系统断电后可继续供电)上。Driver 操作面板相关按钮操作说明:一、 当前监测模式的改变 Driver 上电后,其LED即显示某一信息,此显示信息称为初始显示信息,初始显示信息可有参数Pr01 来设置
20、,Pr=0时显示定位位置偏差数(脉冲),Pr01=1时显示转速,Pr01=2时显示转矩。实际上,在Driver的运行过程中,可以显示其它信息,切换方法如下: 按【SET】键 按【】或【】键从7种显示模式中选择一种 按【SET】键确认 7种显示模式: DP-EPS: 位置偏差 DP-SPD: 电机转速 DP-ERQ: 输出转矩 DP-CNT: 控制模式 DP-IO: 输入输出信号状态 DP-ERR: 过往出错信息 DP-NO: 软件版本二、 改变参数(以Pr20为例)按【SET】键 按【MODE】键,LED上显示PR-00 按【】或【】键至LED上显示PR-20 按【SET】键,LED上显示PR
21、-20以前设定值300 按【】或【】键将此值更改为250 按【SET】键确认 连续按【MODE】键退回监视状态 选择一种监测模式并确认数据存入EEPROMDriver中的参数保存在EEPROM中,这些参数不因断电而消失,当参数被修改后,应执行“写入EEPROM“操作,否则对参数的修改只是当前有效,断电后又会恢复为原来的数值。“写入EEPROM“操作步骤。 按【SET】键 连续按【MODE】键至LED上显示 EE-SET 按【SET】键,LED上显示 _. 按住【】键至LED上显示START 松开【】键 等待LED上显示FINISH 连续按【MODE】键退回监视状态 选择一种监测模式并确认 有些参数修改后,再执行“写入EEPROM“操作后还需先断电,再上电,设置方可生效。 EEPROM:电可擦除只读存储器,此种存储器中数据断电后可保存,又可通过施加电信号重新写入数据。 下图为旧的Driver与PLC系统的接线图
- 温馨提示:
1: 本站所有资源如无特殊说明,都需要本地电脑安装OFFICE2007和PDF阅读器。图纸软件为CAD,CAXA,PROE,UG,SolidWorks等.压缩文件请下载最新的WinRAR软件解压。
2: 本站的文档不包含任何第三方提供的附件图纸等,如果需要附件,请联系上传者。文件的所有权益归上传用户所有。
3.本站RAR压缩包中若带图纸,网页内容里面会有图纸预览,若没有图纸预览就没有图纸。
4. 未经权益所有人同意不得将文件中的内容挪作商业或盈利用途。
5. 装配图网仅提供信息存储空间,仅对用户上传内容的表现方式做保护处理,对用户上传分享的文档内容本身不做任何修改或编辑,并不能对任何下载内容负责。
6. 下载文件中如有侵权或不适当内容,请与我们联系,我们立即纠正。
7. 本站不保证下载资源的准确性、安全性和完整性, 同时也不承担用户因使用这些下载资源对自己和他人造成任何形式的伤害或损失。
