 第五章-平面连杆机构的运动分析和设计1课件
第五章-平面连杆机构的运动分析和设计1课件

《第五章-平面连杆机构的运动分析和设计1课件》由会员分享,可在线阅读,更多相关《第五章-平面连杆机构的运动分析和设计1课件(57页珍藏版)》请在装配图网上搜索。
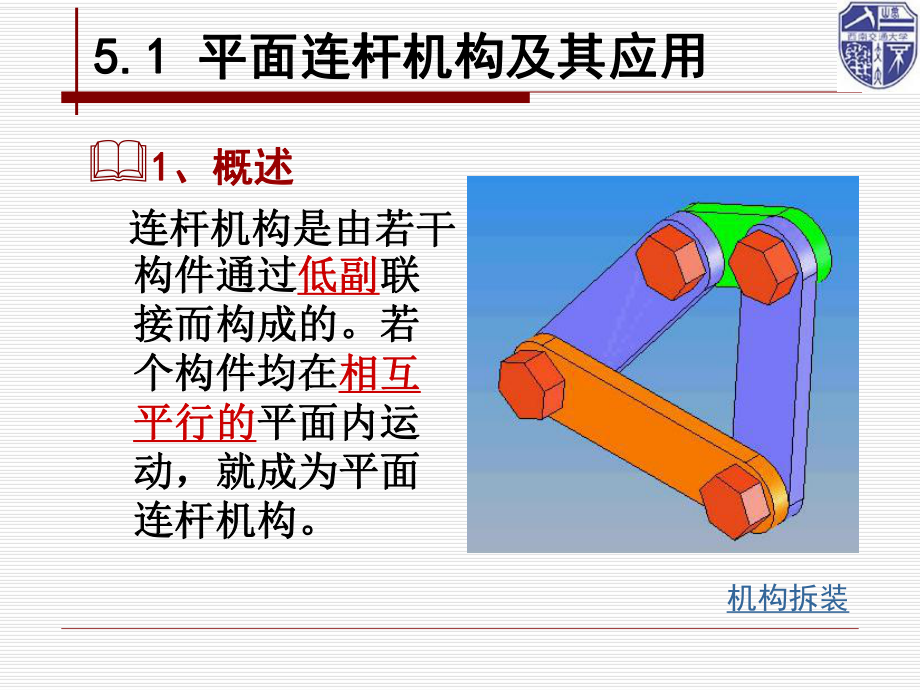
1、5.1 5.1 平面连杆机构及其应用平面连杆机构及其应用&1 1、概述、概述 连杆机构是由若干连杆机构是由若干构件通过构件通过低副低副联联接而构成的。若接而构成的。若个构件均在个构件均在相互相互平行的平行的平面内运平面内运动,就成为平面动,就成为平面连杆机构。连杆机构。机构拆装&2 2、连杆机构的特点、连杆机构的特点F优点优点 连杆机构为连杆机构为低副机构低副机构,运动副为面接触,压强小,承,运动副为面接触,压强小,承载能力大,耐冲击;载能力大,耐冲击;运动副元素的几何形状多为运动副元素的几何形状多为平面或圆柱面平面或圆柱面,便于加工,便于加工制造;制造;在原动件运动规律不变情况下,通过改变各
2、构件的相在原动件运动规律不变情况下,通过改变各构件的相对长度可以使从动件得到不同的运动规律;对长度可以使从动件得到不同的运动规律;连杆曲线连杆曲线可以满足不同运动轨迹的设计要求;可以满足不同运动轨迹的设计要求;F缺点缺点 由于运动积累误差较大,因而影响传动精度;由于运动积累误差较大,因而影响传动精度;由于惯性力不好平衡而不适于高速传动;由于惯性力不好平衡而不适于高速传动;设计方法比较复杂。设计方法比较复杂。&3 3、平面连杆机构的三大功能、平面连杆机构的三大功能在运动学方面,可以实现以下三大功能:在运动学方面,可以实现以下三大功能:v 刚体导引刚体导引v 轨迹生成轨迹生成v 函数发生函数发生
3、1轨迹生成轨迹生成:就是用连杆机构产生一个设计就是用连杆机构产生一个设计要求的要求的连杆曲线连杆曲线。1刚体导引刚体导引:用连杆机构用连杆机构引导刚体引导刚体实现一系实现一系列设计要求的平面位置。列设计要求的平面位置。(既要绕参考点转动、又既要绕参考点转动、又要随参考点平动的平面运动)。通常用连杆来实要随参考点平动的平面运动)。通常用连杆来实现设计要求的刚体位置。现设计要求的刚体位置。1函数发生函数发生:就是实现机构的输入运动变量就是实现机构的输入运动变量和输出运动变量之间的和输出运动变量之间的某种函数关系某种函数关系。刚体导引实例刚体导引实例1 1动画链接刚体导引实例刚体导引实例2 21铲斗
4、作平面一般运动,有三个自由度。三个输入铲斗作平面一般运动,有三个自由度。三个输入运动分别是三个液压油缸提供运动分别是三个液压油缸提供动画链接刚体导引实例刚体导引实例3 3.补充:连杆曲线补充:连杆曲线动画链接轨迹生成实例轨迹生成实例1 1连杆.轨迹生成轨迹生成就是用就是用连杆机构产生一个设连杆机构产生一个设计要求的连杆曲线。计要求的连杆曲线。动画链接轨迹生成实例轨迹生成实例2 2动画链接轨迹生成实例轨迹生成实例3 3动画链接函数发生实例函数发生实例1 1.函数发函数发生生就是实现就是实现机构的机构的输入输入运动运动变量和变量和输出运动输出运动变变量之间的某量之间的某种种函数关系函数关系 cos
5、ABlS动画链接函数发生实例函数发生实例2 2.ABC5.2 5.2 平面连杆机构的基本特征平面连杆机构的基本特征ABCD连架杆连架杆连架杆连架杆连杆连杆v 曲曲 柄柄v 摇摇 杆杆v 周转副周转副v 摆转副摆转副5.2.1 5.2.1 曲柄存在的条件曲柄存在的条件&1.1.铰链四杆机构曲柄存在的条件铰链四杆机构曲柄存在的条件构件构件ABAB要为曲柄,则转动副要为曲柄,则转动副A A应为周转副;应为周转副;为此为此ABAB杆应能占据整周中的杆应能占据整周中的任何位置;任何位置;因此因此ABAB杆应能占据与杆应能占据与ADAD共线共线的位置的位置ABAB及及ABAB。由由DB C由由 DBCcb
6、dacadb)(badc)(cdbabdcaa c a b a d两两相加两两相加 a a最短最短最短杆与最长杆之和小于最短杆与最长杆之和小于等于其它两杆长度之和等于其它两杆长度之和动画演示.补充:补充:GrashofGrashof曲柄存在条件曲柄存在条件 L Lminmin +L+Lmaxmax P P Q Q则则最短杆最短杆两端的转动副均为两端的转动副均为周周转副转副;其余转动副为;其余转动副为摆转副摆转副。其中其中 L Lminmin :最短杆长度:最短杆长度L Lmaxmax :最长杆长度:最长杆长度P P,Q Q:其余两杆的长度其余两杆的长度GrashofGrashof机构机构:满足
7、条件满足条件 L Lminmin+L Lmaxmax P Q的机构。的机构。平面四杆机构存在曲柄的条件平面四杆机构存在曲柄的条件 L Lminmin +L Lmaxmax P P Q Q 最短杆为机架或连架杆最短杆为机架或连架杆动画链接1动画链接2(示例:曲柄摇杆机构 运动演示运动演示(示例:双曲柄机构示例:双曲柄机构惯性筛机构(示例:双摇杆机构示例:双摇杆机构动画演示.特殊机构特殊机构不定点机构不定点机构动画链接1动画链接2克服运动不确定性的措施克服运动不确定性的措施双曲柄双曲柄四杆机构四杆机构最短杆为机架最短杆为机架曲柄摇杆曲柄摇杆四杆机构四杆机构最短杆最短杆为为连架杆连架杆双摇杆双摇杆四
8、杆机构四杆机构最短杆最短杆为为连杆连杆Grashof机构机构 L Lminmin+L Lmaxmax P Q四杆机构四杆机构双摇杆双摇杆四杆机构四杆机构任意杆为机架任意杆为机架四杆机构小节四杆机构小节&2.2.铰链五杆机构曲柄存在的条件铰链五杆机构曲柄存在的条件AEDECDBCABlllll,54321LLLLL1L2L5L将机构各构件的杆长将机构各构件的杆长从小到大进行排列为从小到大进行排列为为最短杆长;为最短杆长;为次短杆长;为次短杆长;为最长杆长。为最长杆长。铰链五杆机构曲柄存在条件:铰链五杆机构曲柄存在条件:最短杆或次短杆为机架或连架杆。最短杆或次短杆为机架或连架杆。43521LLLL
9、L5.2.2 5.2.2 摇杆的极限位置和机构的摇杆的极限位置和机构的急回运动特征急回运动特征&1.1.摇杆的极限位置及其摆角摇杆的极限位置及其摆角动画链接讨论:机构的初始装配状态与可行域讨论:机构的初始装配状态与可行域在机构的运动过程中是不会发生变化的原因在机构的运动过程中是不会发生变化的原因当当曲柄等速回转曲柄等速回转的情况下,通常把的情况下,通常把从动件往复运动速度快慢不同从动件往复运动速度快慢不同的运的运动称为动称为急回运动急回运动。Dabd1B2B1C2Cccab12A主动件主动件a a21ABAB 时间时间:1t转角转角:1运动运动:从动件从动件c c21DCDC 1t12ABAB
10、 时间时间:2t转角转角:2运动运动:12DCDC 2t从动件从动件c c的的平均角速平均角速度:度::DCDC2113t:DCDC1223t 1111180t1122-180t21tt 33 1急回运动急回运动通常把从动件往复运动平均速度的比值通常把从动件往复运动平均速度的比值(大于大于1)1)称为称为行程速比系数行程速比系数,用,用K K表示。表示。11180KK180180K1行程速比系数行程速比系数K K33K 度从动件慢速行程平均速度从动件快速行程平均速13t23t 1111180t1122-180t牛头刨床曲柄滑块机构分析曲柄滑块机构分析对心曲柄滑块机构偏置曲柄滑块机构111801
11、80180KKK(平面连杆机构有无急回作用取决于有无极位夹角。1 若0,该机构必定有急回特征1 若0,该机构必定无急回特征 关于关于K K和和的讨论的讨论思考一下思考一下 将两个不具有急回特征的机构组合在一起,将两个不具有急回特征的机构组合在一起,组合起来的机构会具有急回特征么?组合起来的机构会具有急回特征么?CBADbaF2F1F2C1C转动导杆5.3 5.3 连杆机构的演化连杆机构的演化.铰链四杆机构铰链四杆机构是单自由度连杆机构的是单自由度连杆机构的最基本形式;最基本形式;.各种各种单自由度多杆机构单自由度多杆机构通常是在四杆通常是在四杆机构的基础上加若干个基本杆组而得到的;机构的基础上
12、加若干个基本杆组而得到的;.而而四杆机构的其他形式四杆机构的其他形式,如带有一个,如带有一个移动副的四杆机构和带有两个移动副的四移动副的四杆机构和带有两个移动副的四杆机构,是由铰链四杆机构通过一些演化杆机构,是由铰链四杆机构通过一些演化方法得到的。方法得到的。&1.1.改变构件的形状和运动尺寸改变构件的形状和运动尺寸变摇杆变摇杆为滑块为滑块摇杆尺寸摇杆尺寸为无穷大为无穷大曲线导轨曲柄滑块机构曲线导轨曲柄滑块机构曲柄摇杆机构曲柄摇杆机构偏置曲柄滑块机构偏置曲柄滑块机构对心曲柄滑块机构对心曲柄滑块机构e=0动画链接&2.2.取不同的构件为机架取不同的构件为机架BA1234C(a)曲柄滑块机构曲柄滑
13、块机构(b)曲柄转动导杆机构曲柄转动导杆机构BA1234C(c)曲柄摇块机构曲柄摇块机构A1234CB(d)曲柄摆动导杆机构曲柄摆动导杆机构3A124CB(e)定块机构定块机构A234CB1说明:说明:组成移动副的两活动构件,组成移动副的两活动构件,画成杆状的构件称为画成杆状的构件称为导杆导杆,画成,画成块状的构件称为块状的构件称为导块导块。动画链接1、2、3、4&3.3.扩大转动副扩大转动副 当一个构件上当一个构件上两个转动副之间的距离比较小两个转动副之间的距离比较小的时候,人们通常会采用的时候,人们通常会采用扩大转动副扩大转动副的方法,以的方法,以增大构件的强度和刚度增大构件的强度和刚度
14、。动画链接1、2&4.4.运动副元素的逆换运动副元素的逆换 对于移动副,将运动副两元素的包容关系进对于移动副,将运动副两元素的包容关系进行逆换,行逆换,并不影响两构件之间的相对运动并不影响两构件之间的相对运动。摆动导杆机构摆动导杆机构构件构件2包包容构件容构件3构件构件3包包容构件容构件2曲柄摇块机构曲柄摇块机构 改变形成运动副元素的改变形成运动副元素的包容关系包容关系的演化方法,的演化方法,称为称为运动副元素的逆换运动副元素的逆换。动画小小 结结.铰链四杆机构可以通过改变构件的形状和长度,扩大转动副,选取不同的构件作为机架等途径,演变成为其它类型的四杆机构,以满足各种工作需要。v 移动副与转
15、动副之间的关系v 机构运动学上的等效v 相对运动原理的应用5.4 5.4 平面连杆机构运动分析的解析法平面连杆机构运动分析的解析法(两种方法两种方法:v 解析法解析法:利用计算机进行机构分析:利用计算机进行机构分析v 图解法图解法:利用作图对机构进行运动分析:利用作图对机构进行运动分析(分析目的:分析目的:求位置、速度和加速度求位置、速度和加速度(解析法的关键之处:解析法的关键之处:v 方程建立方程建立v 方程求解方程求解v 编计算机程序编计算机程序 5.4.1 5.4.1 方程组的求解方法(知识回顾)方程组的求解方法(知识回顾)在机构运动分析和设计中,所求解在机构运动分析和设计中,所求解的方
16、程通常是代数方程组,方程组的方程通常是代数方程组,方程组类型:类型:v 线性方程组线性方程组v 非线性方程组非线性方程组&1.1.线性方程组及其求解方法线性方程组及其求解方法 bx1 A则方程组的解为则方程组的解为 (5-65-6)线性方程组可以写成线性方程组可以写成 (5-55-5)nnnnnnnnnnbxaxaxabxaxaxabxaxaxa.22112222212111212111nxxx,.,21其中其中 为待求变量。为待求变量。bx A方程组可以简写为方程组可以简写为(5-55-5)&2.2.非线性方程组及其求解非线性方程组及其求解可以简写为可以简写为 (5-75-7)其中其中0)(
17、xFT21,.,nxxx xn n个变量个变量n n个方程的非线性方程组的一个方程的非线性方程组的一 般形式为:般形式为:0),.,(.0),.,(0),.,(21212211nnnnxxxfxxxfxxxf(5-75-7)牛顿迭代法牛顿迭代法的基本思路:设方程组(的基本思路:设方程组(5-75-7)的解为)的解为 ,则构造一个序列则构造一个序列 来逼近来逼近 。(5-85-8),.x,x,.,x,x1kk10*x)(1kk1kxJxxF*x其中其中 为方程组(为方程组(5-75-7)在迭代点)在迭代点 的的JacobianJacobian矩阵,矩阵,即即kxxJnnnnnxfxfxfxfxf
18、xf.2112111Jkx延伸:非线性方程组的求解延伸:非线性方程组的求解5.4.2 5.4.2 平面连杆机构正运动学分析平面连杆机构正运动学分析 的直角坐标法的直角坐标法P79P79(机构的正运动学分析:机构的正运动学分析:已知机构的各个构件的杆长、已知机构的各个构件的杆长、原动件原动件的位的位置、速度和加速度的条件下,确定机构中置、速度和加速度的条件下,确定机构中从动件的位置、速度和加速度。从动件的位置、速度和加速度。(机构的逆运动学分析:机构的逆运动学分析:已知机构的各个构件的杆长、机构运动已知机构的各个构件的杆长、机构运动输输出构件出构件的位置的条件下,确定机构中在各的位置的条件下,确
19、定机构中在各个运动副处构件之间的相对位置。个运动副处构件之间的相对位置。.直角坐标法直角坐标法一般是先求解运动构件上一些一般是先求解运动构件上一些点点位置、速度位置、速度和加速度,然后求解构件的角位置、角速度和角加速度和加速度,然后求解构件的角位置、角速度和角加速度 点运动参数点运动参数 求角运动参数求角运动参数.矢量法矢量法是先求解运动构件的是先求解运动构件的角角位置、角速度和角加速度,位置、角速度和角加速度,然后再求解该构件上点的运动;然后再求解该构件上点的运动;角运动参数角运动参数 求点运动参数求点运动参数1正运动学分析的直角坐标法正运动学分析的直角坐标法解析法:解析法:v 封闭矢量多边
20、形法封闭矢量多边形法v 混合法混合法v直角坐标直角坐标解析解析法法.混合法混合法是将矢量法和直角坐标法结合在一起的方法是将矢量法和直角坐标法结合在一起的方法 1直角坐标法的基本原理直角坐标法的基本原理确定构件位置的一般表示方法:确定构件位置的一般表示方法:2KJ2KJ)yy()xx(JK1.用构件上一个点用构件上一个点 J(xJ,yJ)2.通过点通过点J的一条标线与坐的一条标线与坐标轴的夹角标轴的夹角XY(,)JJJ x y(,)kkKx y1.用构件上一个点用构件上一个点 J(xJ,yJ)2.另一个不重合点另一个不重合点 K(xK,yK)XY(,)JJJ x y 用点、角表示用点、角表示用点
21、表示用点表示已知如图所示已知如图所示机构的机构的结构尺寸结构尺寸、固定铰链固定铰链点的位置点的位置和和原动件的原动件的运动运动。试分别以构件。试分别以构件CDCD和构件和构件ABAB为原动件,为原动件,确定机构中所有从动确定机构中所有从动构件的运动。构件的运动。2例例 5-35-3,P79P79&1.1.构件构件CDCD为原动件为原动件 解答:解答:v首先建立直角坐标系。首先建立直角坐标系。固定铰链点:固定铰链点:D(0,0),E(xE,yE),A(xA,yA)v机构为机构为级机构级机构 F点点C C的运动的运动 11sin cosCDDCCDDClyylxx(6-96-9)对该式求导,可求得
22、对该式求导,可求得C C点的速度、加速度!点的速度、加速度!0DyDxvv0DyDxaa11根据题意:已知根据题意:已知 、将式(将式(5-95-9)对时间)对时间t t分别作一次、二次分别作一次、二次求导,得点求导,得点C C的速度和加速度方程如下:的速度和加速度方程如下:(b)cos(a)sin1111CDDyCyCDDxCxlvvlvv(a)(b)(5-105-10)(b)cossin(a)sincos1112111121CDCDDyCyCDCDDxCxllaallaa(a)(b)(5-11)5-11)分析分析:.求求B B点或构件点或构件3 3:确定出从动确定出从动构件构件3 3上点上
23、点C C的运动之后,必须的运动之后,必须再确定构件再确定构件3 3上另外一个点才能上另外一个点才能确定出构件确定出构件3 3的运动。构件的运动。构件3 3上上的点的点B B和点和点F F都可以作为下一步都可以作为下一步要求解的点。但是,确定点要求解的点。但是,确定点B B或或F F的位置都必须联立三个或三个的位置都必须联立三个或三个以上的方程才能求解。以上的方程才能求解。求求B B点或构件点或构件3 3求求F F点或构件点或构件2 2?.求求F F点或构件点或构件2 2:如果现在转而分析构件如果现在转而分析构件2 2上的点上的点F F情况情况就不同了。构件就不同了。构件2 2上点上点F F受到
24、两个运动约束:受到两个运动约束:1 1)直线直线CFCF垂垂直于直线直于直线FEFE;2 2)点点F F到点到点E E的距离保持不变,且为已知的的距离保持不变,且为已知的机构结构参数。机构结构参数。结论:结论:求求F F点点F求求F F点运动点运动 v直线直线CFCF垂直于直线垂直于直线FEFEv点点F F到点到点E E的距离保持的距离保持 不变不变(b)1(a)()(222CFCFEFEFEFEFEFxxyyxxyylyyxx(5-12)(5-12)对该式求导,可求得对该式求导,可求得F F点的速度、加速度!点的速度、加速度!两个未知数、两个方程,可以求解!两个未知数、两个方程,可以求解!F
25、求求B B点运动点运动 v B B、F F、C C共线共线v 点点B B、C C之间的距离之间的距离 保持不变保持不变(b)()(a)222BCCBCBCFCBCFCBlyyxxyyyyxxxx(5-16)(5-16)对该式求导,可求得对该式求导,可求得B B点的速度、加速度!点的速度、加速度!两个未知数、两个方程,可以求解!两个未知数、两个方程,可以求解!0)()(0)()(0)()(00)()(0)()(652224222322222221EFBFEFBFFCBCBCFCEFEFEFCDCCBCCBCBABABAByyyyxxxxfyyxxyyxxflyyxxflyxflyyxxfHyyx
26、xf(5-225-22)&2.2.以构件以构件ABAB为原动件为原动件 机构为机构为级机构级机构 v杆长约束:杆长约束:ABAB、BCBC、DCDC、EFEF长度长度v转角约束转角约束:点点B B、F F、C C共线共线v垂直约束垂直约束:直线直线BFBF、EFEF方程数方程数=变量数变量数5.4.3 5.4.3 平面连杆机构的逆运动学分析平面连杆机构的逆运动学分析 机构的逆运动学分析是在已知机构的逆运动学分析是在已知机构的各个机构的各个构件的杆长构件的杆长、机构运动输出构件位置机构运动输出构件位置的条件下,的条件下,确定机构中在各个运动副处构件之间的相对位确定机构中在各个运动副处构件之间的相
27、对位置置。逆运动学分析的具体内容是:逆运动学分析的具体内容是:.确定机构的工作空间确定机构的工作空间 工作空间是机构运动输出构件工作空间是机构运动输出构件或点可以到达的或点可以到达的物理空间的容积物理空间的容积。只有当运动输出构件。只有当运动输出构件或点在其工作空间之内的时候,逆运动学分析才能有解;或点在其工作空间之内的时候,逆运动学分析才能有解;.确定解的个数确定解的个数 一般来说,逆运动学分析的解一般来说,逆运动学分析的解不是惟一不是惟一的的,解的个数与机构的结构、运动尺寸等因素有关。然而,解的个数与机构的结构、运动尺寸等因素有关。然而,机构只能有一种位置形态,也就是只能取其中的一个解,机
28、构只能有一种位置形态,也就是只能取其中的一个解。至于解的取舍问题,可以按照有利于机构的运动控制或。至于解的取舍问题,可以按照有利于机构的运动控制或机构不与其他物体发生碰撞干涉等原则确定;机构不与其他物体发生碰撞干涉等原则确定;.确定解的解法确定解的解法 逆运动学分析问题通常是逆运动学分析问题通常是非线性的非线性的,如,如果采用数值迭代法,如牛顿迭代法,一方面,不易求出所果采用数值迭代法,如牛顿迭代法,一方面,不易求出所有的解,另一方面,求解过程可能要用很长的时间,不能有的解,另一方面,求解过程可能要用很长的时间,不能满足对机构进行实时控制的要求。所以,应该寻求满足对机构进行实时控制的要求。所以
29、,应该寻求封闭解封闭解(封闭解:封闭解:是指一种基于解析表达式或是指一种基于解析表达式或4 4阶及低于阶及低于4 4阶的多阶的多项式的解法,即不需要用数值迭代就可以得到解的方法。项式的解法,即不需要用数值迭代就可以得到解的方法。例例5-4 5-4 对图所示的平面二杆机械手进行逆对图所示的平面二杆机械手进行逆运动学分析运动学分析 平面二杆机械手AXl 2 2杆杆2 2杆杆1 11 12 2Yl 1 1B P(x,y)1121211212cos()cos()sin()sin()xyPllPll1P P点的正运动学,求解点的正运动学,求解 TyxpPPx),(T),(211P P点的逆运动学,求解点的逆运动学,求解TyxpPPx),(此时已知:此时已知:封闭解封闭解xyyxrarctan22 封闭解封闭解12221221222212arccos 2arccosrlllrllrll,由于余弦定理可得:由于余弦定理可得:12 ,由图得:由图得:取取“-”-”对应图中的实线所示的解,取对应图中的实线所示的解,取“+”+”对应虚线对应虚线所示的解。所示的解。
- 温馨提示:
1: 本站所有资源如无特殊说明,都需要本地电脑安装OFFICE2007和PDF阅读器。图纸软件为CAD,CAXA,PROE,UG,SolidWorks等.压缩文件请下载最新的WinRAR软件解压。
2: 本站的文档不包含任何第三方提供的附件图纸等,如果需要附件,请联系上传者。文件的所有权益归上传用户所有。
3.本站RAR压缩包中若带图纸,网页内容里面会有图纸预览,若没有图纸预览就没有图纸。
4. 未经权益所有人同意不得将文件中的内容挪作商业或盈利用途。
5. 装配图网仅提供信息存储空间,仅对用户上传内容的表现方式做保护处理,对用户上传分享的文档内容本身不做任何修改或编辑,并不能对任何下载内容负责。
6. 下载文件中如有侵权或不适当内容,请与我们联系,我们立即纠正。
7. 本站不保证下载资源的准确性、安全性和完整性, 同时也不承担用户因使用这些下载资源对自己和他人造成任何形式的伤害或损失。
