 米高一体化故障原因及处理方式
米高一体化故障原因及处理方式

《米高一体化故障原因及处理方式》由会员分享,可在线阅读,更多相关《米高一体化故障原因及处理方式(15页珍藏版)》请在装配图网上搜索。
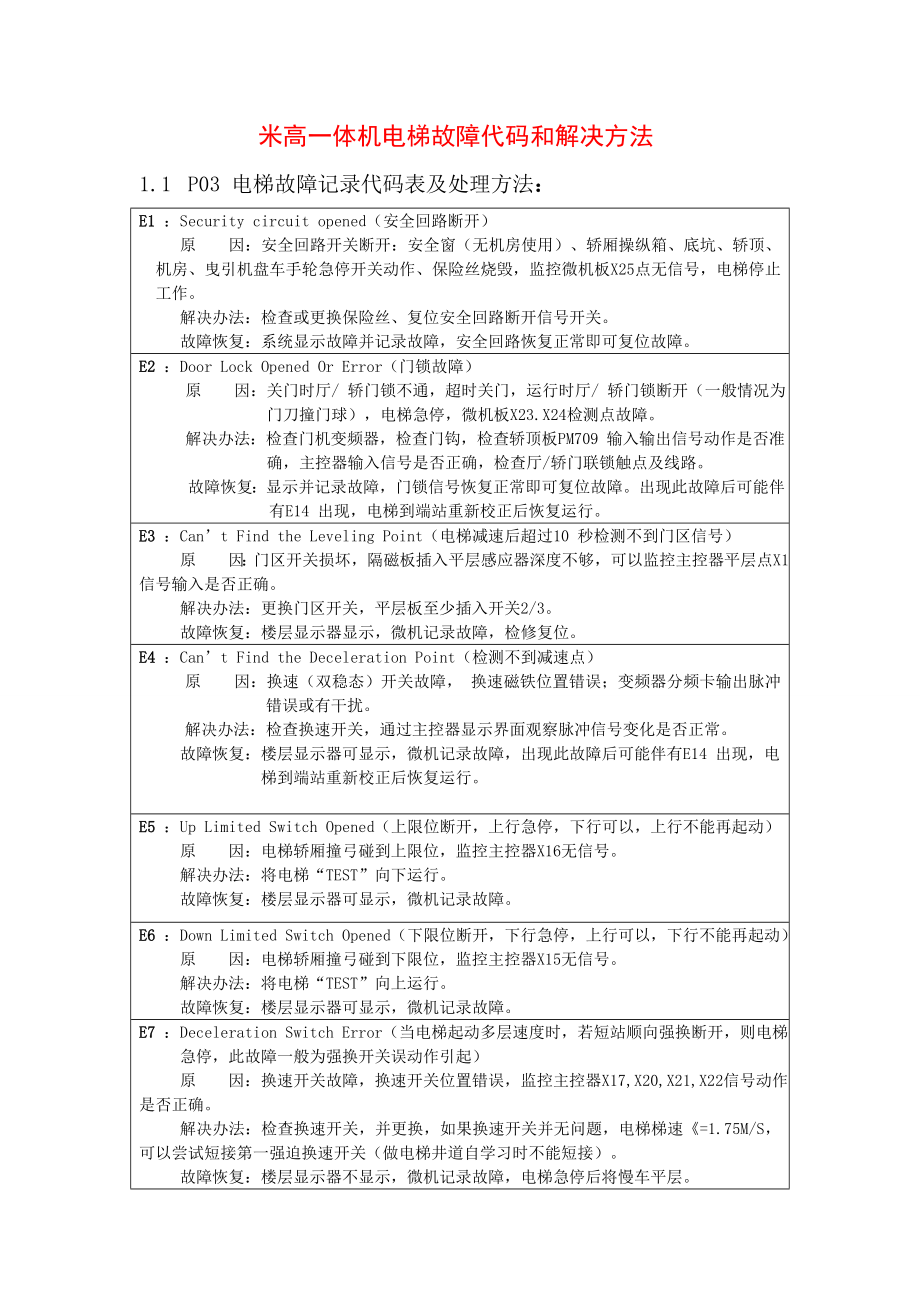
1、米高一体机电梯故障代码和解决方法1.1 P03 电梯故障记录代码表及处理方法:E1 :Security circuit opened(安全回路断开)原 因:安全回路开关断开:安全窗(无机房使用)、轿厢操纵箱、底坑、轿顶、机房、曳引机盘车手轮急停开关动作、保险丝烧毁,监控微机板X25点无信号,电梯停止工作。解决办法:检查或更换保险丝、复位安全回路断开信号开关。故障恢复:系统显示故障并记录故障,安全回路恢复正常即可复位故障。E2 :Door Lock Opened Or Error(门锁故障)原 因:关门时厅/ 轿门锁不通,超时关门,运行时厅/ 轿门锁断开(一般情况为门刀撞门球),电梯急停,微机板
2、X23.X24检测点故障。解决办法:检查门机变频器,检查门钩,检查轿顶板PM709 输入输出信号动作是否准确,主控器输入信号是否正确,检查厅/轿门联锁触点及线路。 故障恢复:显示并记录故障,门锁信号恢复正常即可复位故障。出现此故障后可能伴 有E14 出现,电梯到端站重新校正后恢复运行。E3 :Cant Find the Leveling Point(电梯减速后超过10 秒检测不到门区信号)原 因:门区开关损坏,隔磁板插入平层感应器深度不够,可以监控主控器平层点X16信号输入是否正确。解决办法:更换门区开关,平层板至少插入开关2/3。故障恢复:楼层显示器显示,微机记录故障,检修复位。E4 :Ca
3、nt Find the Deceleration Point(检测不到减速点)原 因:换速(双稳态)开关故障, 换速磁铁位置错误;变频器分频卡输出脉冲错误或有干扰。解决办法:检查换速开关,通过主控器显示界面观察脉冲信号变化是否正常。故障恢复:楼层显示器可显示,微机记录故障,出现此故障后可能伴有E14 出现,电 梯到端站重新校正后恢复运行。E5 :Up Limited Switch Opened(上限位断开,上行急停,下行可以,上行不能再起动)原 因:电梯轿厢撞弓碰到上限位,监控主控器X16无信号。解决办法:将电梯“TEST”向下运行。故障恢复:楼层显示器可显示,微机记录故障。E6 :Down
4、Limited Switch Opened(下限位断开,下行急停,上行可以,下行不能再起动)原 因:电梯轿厢撞弓碰到下限位,监控主控器X15无信号。解决办法:将电梯“TEST”向上运行。故障恢复:楼层显示器可显示,微机记录故障。E7 :Deceleration Switch Error(当电梯起动多层速度时,若短站顺向强换断开,则电梯 急停,此故障一般为强换开关误动作引起)原 因:换速开关故障,换速开关位置错误,监控主控器X17,X20,X21,X22信号动作是否正确。解决办法:检查换速开关,并更换,如果换速开关并无问题,电梯梯速=1.75M/S,可以尝试短接第一强迫换速开关(做电梯井道自学习
5、时不能短接)。故障恢复:楼层显示器不显示,微机记录故障,电梯急停后将慢车平层。E8 :Contact Not Release(主接触器或抱闸接触器触点粘连)原 因:(1)主控器“输入输出信号定义”菜单接触器反馈点常开常闭设置错误 (2)主接触器或抱闸接触器损坏或辅助触点粘连 解决办法:重新设置微机参数,对损坏部件进行更换。故障恢复:楼层显示器可显示,微机记录故障,触点释放后电梯恢复运行。E9 :Taco Direction Error(系统位置计数输入信号反相)原 因:系统计数A、B 相输入反相,监控主控器“电梯当前位置显示”菜单上行脉冲递减,下行脉冲递增。解决办法:改变“系统计数方向”菜单设
6、置值ON/OFF即好。E10 :Brake Error(抱闸反馈故障;电梯运行时抱闸没打开,电梯就近减速平层,不能再起动)原 因:抱闸检测开关损坏,检查线路是否正常,参数设置错误(无此功能而参数被设置),监控主控器输入点X13信号是否正确。解决办法:更换损坏元件,重新设定主控器参数。故障恢复:楼层显示器显示并记录故障,检修或断电后恢复。E11 :Run Time Error(运行超时,电梯运行超过“电梯运行保护时间”菜单限制,或平层感应器信号不变化。)原 因: 楼层变化保护时间设置过短或断爬行时间设置过长;找不到门区或门区信号丢失;平层板插入门区开关不够深,开关不能可靠动作;减速点动作不正常;
7、楼层高度太高(我们建议4到5M装一个隔磁板)解决办法:调整“电梯运行保护时间“值;检查门区开关及线路;检查平层板插入门区开关深度是否足够;检查换速信号及开关是否正常;检查楼层高度,太高多加隔磁板。 故障恢复:楼层显示器可显示,微机记录故障,打检修或断电后恢复。E12 :Inverter Error(驱动器故障,电梯急停)原 因:驱动器故障报警 ,参见P0/P1驱动器故障说明解决办法:将变频器故障复位,如果需要更换请与厂家联系。故障恢复:楼层显示器可显示,微机记录故障,变频器监控点接通后恢复。E13 :Door Contact not Release(开门超过了3 秒,门锁不断开,电梯不能再起动
8、)原 因:门机没电或门机接线错误;门机为手动状态;开/关门控制继电器有故障,检查PM709 门机控制信号;检查门钩。解决办法:打开门机电源开关并设为自动状态;检查门机接线;检查继电器(PM709);检查门钩。 故障恢复:楼层显示器可显示,微机记录故障,门锁断开或打检修后恢复。E14 :计数有误差,电梯所处楼层与计算脉冲误差超过短站换速距离原 因:(1)计数有误差,可能受到干扰,电梯没能正常停靠在平层位置,有时E2,E4,E9 等故障均可能引起此报警。 (2)门区感应器受到干扰(一般为光电开关) (3)轿厢打滑当E14 故障出现时可能同时出现E20、E15、E22 故障,此为计数有误差引起,首先
9、处理好计数误差方能解决其故障。解决办法:(1)检查变频器接地,检查微机脉冲接线是否正确,屏蔽线应单端接在在变频器接地端。 (2)检查变频器PG 卡输出是否正常。 (3)在门区感应器加滤波。 (4)处理轿厢打滑。 (5)外呼屏蔽层单端接零,内选屏蔽层单端接地,零地不能混接(实在要接可以跨一个阻容滤波回路)。 若还不能解决问题,请重新自学习。 故障恢复:楼层显示器不显示,微机记录故障,电梯平层后将以单层速度回归下端站。E15 :脉冲计数楼层与感应器计数不一致原 因:门区开关故障或安装不到位;门区开关接线错误;脉冲信号不正常,检测是否有E9,E14 出现解决办法:检查门区开关,如损坏进行更换;检查接
10、线;检查脉冲计数,参考相关故障代码。 故障恢复:楼层显示器不显示,微机记录故障,不作停梯处理。E16 :在E22 故障下,电梯在限位但端站信号不正确,要求限位信号断开时,端站换速开关要断开。原 因:短站换速开关损坏或安装不到位解决办法:更换开关;检查安装相对尺寸是否正确E17 :暂不用E18 :输出方向信号4 秒后检测不到变频器运行中信号原 因:变频器参数设置错误(一般为变频器选择了富士或者安川时序);接线或端子松动;电梯运行过程中有主接触器抖动断开。解决办法:检查变频器及参数(运行中信号点设置是否正确);检查接线及端子;观察电梯运行过程中有主接触器抖动断开,如有检查安全回路或门锁是否有瞬间断
11、开状况,检查主控器X02点信号输入是否正确。E19 :暂不用E20 :楼层记录与强换开关不一致,电梯不在端站而强换开关断开原 因:换速开关损坏;换速开关安装不正确;门区开关发生误动作;计数有误差 解决办法:检查换速开关,仿照E14 故障检查计数误差原因。 故障恢复:楼层显示器不显示,微机记录故障。E21 :设置机械抱闸反馈点粘连检测时,若机械抱闸反馈点粘连时报此故障。 解决办法:检查开关、 故障恢复:楼层显示器可显示,微机记录故障,反馈点不粘连时故障恢复。E22 :楼层记录以强换开关不一致,电梯不在端站而强换不断开 原因: 换速开关损坏;计数有误差解决办法:检查或换速开关、仿照E14故障检查计
12、数误差原因故障显示及恢复方法;本故障不在层显显示,但微机记录故障。E23 :按钮卡死故障,卡住超过30 秒 原因:外呼按钮卡死 解决办法:检查或更换外呼按钮;本故障不在层显显示,但微机记录故障。E24 :当门锁接通超过3 秒,关门限位没有断开,则微机将记录故障E24,并在外呼显示该 故障号,并反向开门, 若有2 号门机,则2 号门机关门限位输入点必须处于断开状 态。原 因:主控器“电梯开门方式设定”错误;门限位开关损坏;门限位开关调整不到位;变频门机参数设置错误。解决办法:检查或更换开关;调整开关位置;检查变频门机参数,检查变频门机到位开关接线是否正确。 故障恢复:转检修或门锁断开超过2 秒或
13、关门限位断开后都可复位此故障。E25 :有提前开门功能时,检测不到“安全门区”输入点X27信号 原 因:接线松动或错误;安全模块损坏 解决办法:检查接线;检查安全模块(一般为继电器触点不行) 故障恢复:本故障在层显显示,微机记录故障;信号恢复后即可复位此故障。E26 :使用提前开门功能时,电梯停车偶尔会报,不影响运行,可以通过修改程序屏蔽。 E27:有提前开门功能时,检测不到“安全触点”输入 原 因:接线松动或错误;门区信号故障;安全模块故障 解决办法:检查门区开关动作是否准确,安装是否到位;检查安全模块工作是否正常 故障恢复:本故障在层显显示,微机记录故障;信号恢复后即可复位此故障。E28:
14、有提前开门功能时,检测不到变频器低速点输入 原 因:变频器参数错误或元件损坏 解决办法:检查变频器参数及速度监控信号 故障恢复:本故障在层显显示,微机记录故障;信号恢复后即可复位此故障。E29: 暂不用E30:在俄罗斯模式下安全窗被打开,电梯不能走车,安全窗关闭后需要检修位 原 因:安全窗开关损坏或接线问题;人为操作后忘记复位;没有使用该功能时“俄罗斯安全窗检测”菜单设成ON。解决办法:检查接线或更换开关;检修复位;修改主控器该参数为OFF。 故障恢复:本故障在层显显示,微机记录故障;在检修状态下可复位此故障。E31:平层开关信号粘连故障,给出运行信号3S 钟平层信号无动作。 原 因:平层开关
15、动作不准确;平层开关损坏;接线错误,有短路现象 解决办法:平层板至少插入开关2/3,请阅读“电气安装手册”。更换开关;检查线路 故障恢复:楼层显示器可显示,微机记录故障,只有打检修后可复位此故障。E32:电动机过热,电梯保持开门不运行 原 因:电机过热;主控器X00点有信号输入。 解决方法:出现此故障请与厂家联系。 故障恢复:楼层显示器不显示,微机记录故障,电机冷却后恢复此故障。E34: 使用提前开门功能时安全模块门区信号不释放。E35:一体化机内部通信故障E36:使用手动门时磁吸合超过2分钟。E38:光幕持续动作时间超出菜单“遮挡安全触板时间”设定时间。E39:电梯运行超速 原 因:同步电机
16、磁偏角度值异常;电梯额定速度、运行速度、电机额定频 率、电机额定转速(有时候多确认几下该参数可以处理)设置值不合理。 故障处理:合理设置以上数据值。E40: 高速强迫减速开关安装距离过长 原 因:高速强迫减速开关安装距离过长,电梯运行到达端站撞击开关时电梯还未 开始减速。 解决方法:调短高速强迫减速开关距离后,监控L30菜单参数如果电梯到达端站时此值 小于电梯的额定速度即好。E41: 轿顶板通信异常 原 因:轿顶板(PM709)与主控板通信异常,可能是通常线路质量异常或终端电阻 设置错误,或轿子顶板损坏,导致电梯不开门,伴随有E13出现。E42: 检测不到主接触器反馈点输入原 因:当电梯运行时
17、因为外部原因,运行接触器断开,而一体化还有输出,一般运行接触器会打弧。解决方法:出现这种情况的时候一般为电梯零速到下闸的瞬间电梯急停,检查外部安全、门锁回路。 1.2 P01一体机驱动器故障信息及处理方法故障代码故障名称判别条件故障原因E100OC1/变速中过流在加减速过程中,驱动器的输出电流超过阀值(约额定电流的200%)负载过大,加减速时间过短,使用了特殊电机或最大适用功率以上的电机,驱动器输出侧发生短路、接地E101OC2/稳速中过流在稳速过程中,驱动器的输出电流超过阀值(约额定电流的200%)负载过大,使用了特殊电机或最大适用功率以上的电机,驱动器输出侧发生短路、接地E102OV1/减
18、速中过压减速中,OV或DVOV阀值减速过快,制动电阻阻值太大或没接,制动模块失效E103OV2/非减速中过压非减速,OV或DVOV阀值输入电压过高,倒拖负荷过重,制动电阻阻值太大或没接,制动模块失效E104OC3/瞬间过流模块过流过热加速过快,负荷过重,电机和变频器不匹配E105UV1/电压过低DV阀值电机对地阻抗过低E109OL3/变频器过载达到输出电流上限持续超过10S负荷过重,电机和变频器不匹配E110OH2/其他过热OT小散热风扇失效,充电电阻过热,外部过热(电机、制动电阻),主接触器断开或者接触不良E111BER1/内置制动单元异常未运行前打开后或制动中不打开制动单元及其驱动电路故障
19、E112BD/主板故障1发生超时复位(死机)受强干扰或主板不良E113BER1/主板故障2EEPROM数据读出效验错误/写入故障E114BER2/主板故障3PG卡通信故障/绝对型编码器通讯故障E115CD/扩展卡自检异常故障代码故障名称判别条件故障原因E116PGF/编码器异常E117CE/电流互感器自检故障初始电流不为零受强干扰或主板不良E118DRE/驱动单元异常驱动板自检错误E119PRE/程序错误E120EST/手动急停E121EF/正反转同时输入正转指令(X1)与反转指令(X2)同时输入0.5秒以上E122LE/自学习失败辅助代码显示于驱动器报警时,或辅助信息中,详细参照辅助代码表E
20、123PRE1/扩展程序错误运行代码不正确E124PRE2/扩展程序错误参数设置错误或冲突E125PRE3/扩展程序错误外部逻辑错误E126E127BER3/主板故障2EEPROM数据异常(效验字不正确)E128E129E130UV/控制电源低E131OPE1/参数超范围EEPROM数据读出超范围非法的EEPROM写入或主板的软件版本更变E132OPE2/参数不合理(P02)辅助代码显示于驱动器报警时,或辅助信息中,详细参照辅助代码表E133OPE3/参数设置冲突或重复(P02)辅助代码显示于驱动器报警时,或辅助信息中,详细参照辅助代码表E134OPE4/(V/F)参数设置错误没有按D2.01
21、 E1.01 E1.03 E1.05,E1.02 E1.04 E1.06设定。E135OPE5/参数未初始化未经检测的新主板E136OPE6/多功能端子功能设置冲突没有按照多功能端子的甚至规则设置参数或输入端子功能重复E137OPE7/模拟端子功能设置冲突一个模拟输入量被多个功能引用E138OPE8/扩展参数超范围E139OPE9/扩展参数设置错误E140OPF/外部操作错误故障代码故障名称判别条件故障原因E141OUT/超过使用限时E150OH1/模块过热RTH阀值散热器温度过高,散热风扇失效E151PF1/输入缺相平均直流电压波动值阀值负荷过大,电机和变频器不匹配,输入缺相,电源容量小,瞬
22、时停电E152PF2/输出缺相经过励磁时间后电机反馈电流达不到设定值的50%电机断线或电机类型不对E153OS1/超速电机速度超过超速保护阀值的设定值并保持了超速保护时间以上的时间指令速度过高,速度控制偏差过大,的设定值不适当E154OS2/失速电机速度偏差超过速度偏差过大保护阀值的设定值并保持了速度偏差过大保护时间以上的时间。负载太大,加速时间太短,负载处于锁定状态的设定值不适当E155PGO/编码器断线平均转矩指令超过监测阀值时编码器脉冲数变化小于2编码器断线E156PGE/错相平均转矩指令超过监测阀值时转矩指令和反馈频率反向编码器相位和电机相位相反E157OL2/过扭矩平均转矩指令超过阀
23、值负荷过重,或参数设置不正确E158OL3/最大电流输出电流达到最大值且维持一段时间负荷过重,电机堵转E159OL1/电机过载电机热过载负荷过重,电机和变频器不匹配E160EE/外部故障外部故障端子有效E161扭矩异常波动平均转矩指令波动值超过阀值E162CCE/通讯断线E163E164编码器脉冲异常波动稳速时每10ms脉冲变化数差别大于阀值编码器受干扰或安装不良E165JE/Z相校正失败没有Z相信号,Z相信号受到干扰,编码器线数或电机极数设置出错E166零伺服异常零伺服中但位置偏离了负荷过重,零伺服参数设置不合适E167端子信号错误非法称重开关组合E168POE1/定位不准E169POE2/
24、定位校正失效E170PID1/PID反馈丧失自学习故障 (注:自学习时发生常规故障请参考对应E100-E199情况处理)E200E201不能达到测试电流电机断线或电机参数设置错误E202测试不合理E203不能达到测试转速电机轴负荷过大,电机参数设置错误,编码器线数不正解确E204编码器相位不正确编码器信号异常,编码器接线异常,PG卡异常E205没有Z相信号E206Z相电平设置不正确E207电机没有旋转电机断线或编码器断线E208错相E209编码器极数/电机极数不正确E210磁极搜索激励电流过小E211电机极数和设置不同E212磁极位置学习不准学习时电流过小,编码器打滑,轴负荷过大或正反不一致E
25、213磁极静态自学习时编码器还未校正1.3 P02 驱动器当前故障对应的辅助代码及状态表故障代码P02辅助信息错误原因E1321频率上限%小于频率下限%2未定义的容量代码3电机空载电流B16大于或等于电机额定电流B124电机空载电流B16大于60%变频器最大输出电流5电机一次线电阻B18远小于合理值6电机一次线电阻B18设置不合理-电机额定电流B12*电机一次相电阻电机额定电压B137电机功率因数计算不合理。相关参数:电机额定功率B10,电机额定电流B12,电机一次线电阻B18,力矩补偿时的电机铁耗8空载电流过小9电机参数不合理,额定力矩电流指令为010电阻乘空载电流大于额定电压11格式代码错
26、误1(速度指令)12格式代码错误2(位置指令)13格式代码错误3(PID指令)14电子凸轮阶段定义不正确15通讯口定义错误16编码器线数不符合Z相校正要求/17脉冲输入不可作为PID偏差输入18扶梯模式自动润滑停止时间大于周期19卸压下限大于等于上限20非法程控模式值21定位模式下没有设置三线制模式22非法编码器类型23未定义的电机类型24CAN自动发送时间设置过短E1331组合指令1/B1不是设置在X32组合指令1/B2不是设置在X43组合指令1/B2没有B14组合指令1/B3不是设置在X55组合指令1/B3没有B1B26组合指令1/B4不是设置在X67组合指令1/B4没有B1B2B38组合
27、指令1/B5不是设置在X79组合指令1/B5没有B1B2B3B410组合指令2/B1设置在X10/11有组合指令2/B1没有组合指令2/B212UP端子设置在X1013有UP端子没有DOWN端子14模拟口#1增益设置值小于偏置设置值15模拟口#2增益设置值小于偏置设置值16模拟口#3增益设置值小于偏置设置值17RP增益设置值小于偏置设置值18模拟口#1设置冲突19模拟口#2设置冲突20模拟口#3设置冲突2122主轴定位校正开关设置与X9设置冲突23主轴定位没有设置Z校正24无PG方式使用主轴定位25扭矩指令AUX与起动补偿不能同时使用26电子齿轮比设置超范围27设置超过1个外部故障端子28双P
28、G主轴定位方式没有设置PG2Z相校正29非闭环模式下设置位置跟随模式30位置给随模式与速度/位置切换冲突44闭环控制模式没有PG卡E1221不能达到测试电流-电机断线、电机参数设置错误2测试结果不合理3不能达到测试转速-电机轴负荷过大、电机参数设置错误、编码器线数不正确4编码器相位不正确5没有Z相信号6Z相电平设置不正确7电机没有旋转(电机或编码器断线)8错相9编码器极数或电机极数不正确10磁极搜索激励电流过小11电机极数和设置不同12磁极位置学习不准(学习电流过小、编码器打滑、轴负荷过大或正反不一致)E1191除数为零2溢出3异常的转移控制变量4奇偶地址错5SLOT错误6非法指令7DTC地址
29、错误8异常的变量值E1401超范围的主轴分度位置2双PG主轴定位模式第二PG反向E1161UVW电平异常2编码器通讯错误/断线3编码器数据异常4PG卡通讯异常5RESOLVER信号不良P02驱动器当前故障(状态)频率指令故障发生时系统给定的指令频率输出频率故障发生时驱动器输出频率反馈频率故障发生时系统接收到传感器反馈的运行频率输出电流故障发生时驱动器输出电流指令力矩故障发生时驱动器输出力矩输出电压故障发生时驱动器输出电压直流电压故障发生时驱动器内部中间回路直流电压温 度故障发生时系统散热器实时温度端子电压故障发生时模拟量输出端子F1实时电压1.4 常见故障处理1.不能进行参数的设定方法一:一体
30、化处于运行状态时,有些参数是不能设定的,请撤消一体化运行使能后再进行设定。方法二:密码不一致(已设定密码时)一体化启动时,密码OP1/OP2已设定加密但没进行解密或解密错误时,其相对应的系统参数将不可更改,请输入正确密码进行解密。注:忘记密码时,请与供应商联系。2、显示E131或E132报警参数的设定值有异常,请参照变频器参数菜单P02(辅助信息)显示的值,查询“发生故障对应的辅助代码表”3、电机不旋转电机不旋转时,请实施以下处理步骤。原因1、电机参数设置错误电机参数不正确或PG错相等原因导致电机不旋转。请进行正确接线,设置基本电机参数,并根据实际工况进行相应的电机自学习。原因2、频率指令太低
31、频率指令比F30(零速阀值频率)所设定的频率值低时,电机不能旋转。据实际需要更改参数给定零速阀值频率以上的频率指令。现象2、加速时和负载连接时电机停转负载太大。一体化有防止失速功能和全自动力矩加大功能。加速度或负载太大时,会超过电机响应的界限,请延长加速时间(C02/D01),减少负载;编码器相续不对;电机UVW三相接线松动;另外,也请考虑提高电机与一体机的容量。 电梯门锁、安全回路不通4、电机的旋转方向相反电机的旋转方向相反是电机输出线错误接线的缘故。若一体化的电源相序U、V、W和电机的电源相序U、V、W正确连接,则正转指令时电机正转。正转方向由电机厂家和机种决定。所以请确认电机规格,旋转方
32、向选择相反时,请切换U、V、W相中的两相或把“电机旋转方向”反向功能打开。5、电机不输出力矩/加速时间太长电机不输出力矩、加速时间太长时,请实施以下处理步骤。 限制力矩输出设定参数E19/E20(力矩上限)后,因未能输出力矩上限以上的力矩,会导致力矩不足,加速时间变长。请确认力矩限制是否适当。 稳速中失速保护阀值太低参数F12(运行中失速防止阀值%)的设定值太低,会导致输出力矩之前速度降低。请确认设定值是否适当。 使用矢量控制,未实施自学习未实施自学习时,不能达到矢量控制的性能,请实施自学习或根据计算设定电机参数。6、电机旋转超过频率指令电机旋转超过频率指令时,请实施以下处理步骤。 “停靠方式
33、”菜单设置为2数字量带爬行停靠时曲线频率指令端子的输入信号异常请确认参数“电梯实际速度”和“爬行速度”的值是否合理。7、使用无传感矢量控制模式,高速旋转时的速度控制精度太低,电机额定电压变高。一体化输出电压的最大值由输入电压决定。当矢量控制计算结果的输出电压指令值高于一体化的输出电压最大值时,速度控制精度降低。请使用额定电压值的电机(矢量控制专用电机)。8、电机减速缓慢电机减速缓慢时,请实施以下处理步骤。现象:即使连接制动电阻减速时间也太长此时,要考虑以下原因。 减速时间的设定值太长请确认参数“减速时间”的设定是否适当。 电机的力矩不足参数正常,也未发生过故障报警时,表示已达到电机功率的界限。
34、请考虑提高电机的容量。 限制力矩输出设定参数“拖动力矩上限”和“制动力矩上限”后,因未能输出力矩上限以上的力矩,会导致力矩不足,加速时间变长。请确认力矩限制是否适当。9、电机过热一般情况下为变频器通过UVW三相输给电机的电流超过额定电流常时间运行,导致电机线圈发热,电机过热时,请实施以下处理步骤。n原因1、负载过大电机的负载量过大时,实际力矩在超过电机额定力矩状态下长时间运行(最常见的是托闸运行),会导致电机过热。在电机的参数表中,有记载连续额定项目以外的短时间过载项目。请减轻负载或延长加速时间。另外,也请考虑提高电机容量。n原因2、周围温度过高电机的额定值是在额定的环境温度内决定的。在超过额
35、定的环境温度时,继续保持额定力矩运行,则会导致电机的损坏。请将电机的环境温度降低至额定值以内。n原因3、电机的相间耐压不足在一体化输出端连接上电机,一体化的开关和电机绕组间会产生冲击电压。通常,最大输出电压大约为一体化输入电源电压的3倍。请使用相间冲击耐压比最大冲击电压高的电机。400V级一体化,请使用变频专用电机。n原因4、在矢量控制模式中,未实施自学习未实施自学习时,不能达到矢量控制的性能,请实施自学习或根据计算设定电机参数。10 启动一体机便会产生电磁干扰由一体化的高次谐波引起干扰时,请实施以下处理步骤。下调参数“载波频率”的设定值,变频器的功率越大,调得越小;因减少了内部开关的频率,以
36、达到某种程度的效果。请在一体机的电源输入侧设置输入侧噪音滤波器。请在一体机的电源输出侧设置输出侧噪音滤波器。由于电波可由金属屏蔽,请将电缆套上金属管,且一体机的周围用金属屏蔽。请务必将一体机本体与电机良好接地。请将主回路与控制回路接线分离走线。11 运行一体机则漏电断路器动作由于开关切换动作是在一体化内部进行的,所以会产生漏电流。过大的漏电流会导致漏电断路器动作并切断电源。请更换漏电流检出值较高的断路器(感度电流200mA以上,动作时间0.1秒以上)或者设置了高频对策的断路器(变频器专用)。下调参数B03(载波频率)的设定值在某种程度上有效果。检查电源和电机的动力线是否太细,如果太细请更换和电
37、梯相匹配的动力线。另外,若延长动力长度,则会导致漏电流增加。12机械振动机械振动时,请实施以下的处理方法: 机械系统的固有频率和载波频率的共振电机单独动作时没问题,但连接机械后机械发出尖锐的声音,表示机械系统的固有频率与一体化的载波频率产生了共振。请调整参数B03(载波频率)的设定值,避免共振频率。 在电流、磁通矢量控制中振动/振荡增益调整不充分。请按顺序调整参数E21(减速时电流增益衰减%)、E11、E12、E13、(速度比例增益)、E14、E15、E16(速度积分时间)。则设定效果大的增益,请减小比例增益设定值,增大积分时间设定值。未实施自学习时,不能达到矢量控制的性能,请实施自学习或根据
38、计算设定电机参数。 在PID控制过程中产生振动/振荡增益调整不充分。请确认振动的频率,调整P、I、D的各动作,低速增益(积分)控制加减速,高速增益(积分)控制运行中,增益太大会发生机械震动,太小会拉不动满载和重载。 在矢量控制中未实施自学习未实施自学习时,不能达到矢量控制的性能,请实施自学习或根据计算设定电机参数,我们建议连续学习0(线间电阻),1(电机漏抗和阻抗),2(电机的磁偏离角)。13、即使一体机停止输出电机也旋转在配备适当制动电阻的前提下,若一体化停止输出电机依然旋转,说明停止时的直流制动不充分。若进行减速停止时电机也不完全停止,有低转速自由滑行停止的现象,说明直流制动时不能充分减速。请按以下方法调整直流制动控制过程:增大参数G04(下闸/停车直流锁定时间)的设定值。 14、下闸后电机有2个声音 这种情况为变频器输出电流还未完全的撤掉就下闸,可以相应的把参数“输出停止过渡时间”加大,我们建议在0.15S到0.34S的范围内调试。 15、电梯运行中门锁或者安全回路突然断开(特别在低速时),运行接触器打弧很厉害 这种情况为电梯急停时,速度信号释放,但是方向和使能和基极封锁没有断开,变频器仍然输出电流,引起严重打弧,出现这种情况时请联系我公司。
- 温馨提示:
1: 本站所有资源如无特殊说明,都需要本地电脑安装OFFICE2007和PDF阅读器。图纸软件为CAD,CAXA,PROE,UG,SolidWorks等.压缩文件请下载最新的WinRAR软件解压。
2: 本站的文档不包含任何第三方提供的附件图纸等,如果需要附件,请联系上传者。文件的所有权益归上传用户所有。
3.本站RAR压缩包中若带图纸,网页内容里面会有图纸预览,若没有图纸预览就没有图纸。
4. 未经权益所有人同意不得将文件中的内容挪作商业或盈利用途。
5. 装配图网仅提供信息存储空间,仅对用户上传内容的表现方式做保护处理,对用户上传分享的文档内容本身不做任何修改或编辑,并不能对任何下载内容负责。
6. 下载文件中如有侵权或不适当内容,请与我们联系,我们立即纠正。
7. 本站不保证下载资源的准确性、安全性和完整性, 同时也不承担用户因使用这些下载资源对自己和他人造成任何形式的伤害或损失。
