 ModelPredictiveControlToolbox——设计和仿真模型预测控制器
ModelPredictiveControlToolbox——设计和仿真模型预测控制器

《ModelPredictiveControlToolbox——设计和仿真模型预测控制器》由会员分享,可在线阅读,更多相关《ModelPredictiveControlToolbox——设计和仿真模型预测控制器(7页珍藏版)》请在装配图网上搜索。
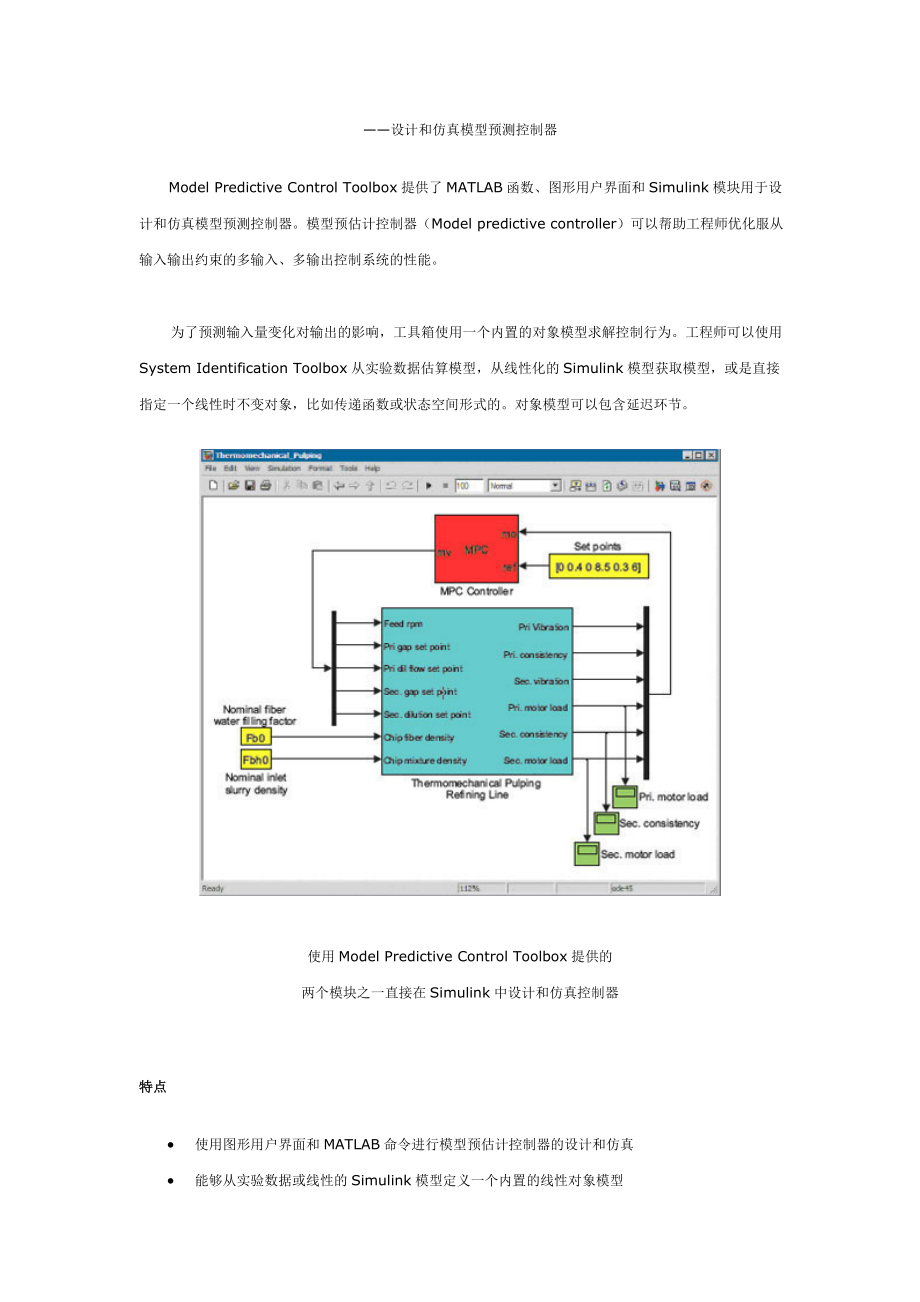
1、设计和仿真模型预测控制器 Model Predictive Control Toolbox提供了MATLAB函数、图形用户界面和Simulink模块用于设计和仿真模型预测控制器。模型预估计控制器(Model predictive controller)可以帮助工程师优化服从输入输出约束的多输入、多输出控制系统的性能。 为了预测输入量变化对输出的影响,工具箱使用一个内置的对象模型求解控制行为。工程师可以使用System Identification Toolbox从实验数据估算模型,从线性化的Simulink模型获取模型,或是直接指定一个线性时不变对象,比如传递函数或状态空间形式的。对象模型可以
2、包含延迟环节。使用Model Predictive Control Toolbox提供的两个模块之一直接在Simulink中设计和仿真控制器特点 使用图形用户界面和MATLAB命令进行模型预估计控制器的设计和仿真 能够从实验数据或线性的Simulink模型定义一个内置的线性对象模型 在Simulink中直接提供Simulink模块用于设计和仿真模型预测控制器 利用无扰动控制切换使用多个模型预测控制器控制非线性对象 能够处理时变约束和权重、非对角权重及自定义不可测量的干扰模型 通过RTW能够生成C代码的应用发布强大功能使用Model Predictive Control Toolbox Mode
3、l Predictive Control Toolbox 使用图形用户界面来组织管理工程师开发的控制器,并把它加入到工程项目中,使工程师可以对项目进行管理并尝试多种控制器。 使用Control and Estimation Tools Manager 简化了这些工作,导入模型和以前设计的控制器,定义被控对象的输入输出,它们的单位及其名义值。该管理器能在界面中显示控制器的结构,标示设置点的个数、操作变量、干扰及可测量和不可测量的输出。 使用Control and Estimation Tools Manager 工程师可以: 定义计算后续控制行为中所用的内置对象模型 设计模型预估计控制器 仿真线
4、性模型控制器的闭环行为定义内置对象模型 模型预测控制器的控制行为建立在其内置的过程对象模型之上。这个内置的模型让控制器得以预见将要发生的过程行为并遵从输出约束。具有自我更新能力的内置模型使得模型预估计控制比庞杂的耦合PID回路更容易维护,后者当系统参数发生变化时需要对每一个回路独立进行调节。 Model Predictive Control Toolbox使用LTI模型,使工程师可以使用MathWorks控制系统设计产品系列所通用的传递函数模型结构形式。工程师可以从MATLAB 工作空间(workspace)或是.MAT文件中将多个LTI模型导入到工具箱中。 使用Simulink 和Simul
5、ink Control Design 工具,工程师能从Simulink中获取模型的线性化形式并自动将其导入为工具箱控制器的内部被控对象模型。然后工程师就可以在Simulink的每一仿真步长中精炼这个内部被控对象模型。设计控制器 工具箱可以与MATLAB 或 Simulink.一起使用设计控制器。在MATLAB中设计控制器 工程师可以设计多个控制器,并通过仿真选择最优配置。对每一个控制器,工程师都可以选择一个对象模型并指定如下的控制器参数: 预期值(Prediction) 和控制水平(Control horizons) 操作和输出变量的约束条件 输入输出变量的权重因子(Weighting fac
6、tors) 用于描述不可测量输入输出扰动和测量噪声的模型利用Control and Estimation Tools Manager 设置可操作和输出变量的约束条件 工具箱支持时变约束和权重、非对角权重及自定义不可测量的干扰模型。在Simulink中设计控制器 当Model Predictive Control Toolbox 与 Simulink Control Design一起使用时,可以直接从Simulink模型中创建控制器。使用Model Predictive Control Toolbox的模块并适当的连接模块的输入和输出,Simulink Control Design就能从中提取出
7、线性化对象模型并生成控制器。Model Predictive Control Toolbox 使用相同的GUI来指定Simulink中的控制器参数,同在与MATLAB一起使用的情形一样。 工程师可以使用多个模型预测控制器模块在一个大范围的操作条件下去控制非线性Simulink模型,也可以使用该模块对每一个操作点设计模型预测控制器,并能在模型运行时在模型预测控制器之间切换。多个模型预测控制器模块确保在一个模型预测控制器到另一个之间的无扰动控制切换。工程师在控制器设计时通过线性化Simulink模型或直接指定对象模型可以在每一个操作点处创建线性对象模型。闭环特性仿真 工程师可以在MATLAB 和
8、Simulink中仿真控制器以评估它的性能。在MATLAB中仿真 工程师可以使用MATLAB函数或Control and Estimation Tools Manager针对线性对象模型运行模型预测控制器的闭环仿真。工程师通过Control and Estimation Tools Manager可以创建多个仿真实例。对每一个仿真实例,工程师可以从以下信号输入控制器设定点和不可量测的干扰: 常数值 阶跃信号 脉冲信号 斜坡信号 正弦信号 Gaussian(高斯噪声) 工程师可以比较控制器与被控对象配置,以判别模型的偏差和不同权重因子对约束条件和变量的影响。还可以暂时屏蔽约束条件的作用以评估闭环
9、系统的动态特性,例如稳定性和阻尼。使用Control and Estimation Tools Manager配置和运行仿真以测试控制器在Simulink中仿真 工程师可以使用模型预测控制工具箱提供的Simulink模块针对非线性Simulink模型运行模型预测控制器的闭环仿真。运用模型预测控制器 该工具箱提供两种方法把设计的控制器运用于实际应用。工程师可以使用Real-Time Workshop,在Simulink中编译生成控制器的代码,并应用于目标系统的实现或是在xPC目标上作原型应用。(有关代码生成所支持的目标,请见产品文档“Using Model Predictive Control Toolbox with Real-Time Workshop”)。也可以通过OPC Toolbox,将在MATLAB中操作的控制器直接连接到一个OPC兼容的系统上。
- 温馨提示:
1: 本站所有资源如无特殊说明,都需要本地电脑安装OFFICE2007和PDF阅读器。图纸软件为CAD,CAXA,PROE,UG,SolidWorks等.压缩文件请下载最新的WinRAR软件解压。
2: 本站的文档不包含任何第三方提供的附件图纸等,如果需要附件,请联系上传者。文件的所有权益归上传用户所有。
3.本站RAR压缩包中若带图纸,网页内容里面会有图纸预览,若没有图纸预览就没有图纸。
4. 未经权益所有人同意不得将文件中的内容挪作商业或盈利用途。
5. 装配图网仅提供信息存储空间,仅对用户上传内容的表现方式做保护处理,对用户上传分享的文档内容本身不做任何修改或编辑,并不能对任何下载内容负责。
6. 下载文件中如有侵权或不适当内容,请与我们联系,我们立即纠正。
7. 本站不保证下载资源的准确性、安全性和完整性, 同时也不承担用户因使用这些下载资源对自己和他人造成任何形式的伤害或损失。
