 S7200脉冲控制说明
S7200脉冲控制说明

《S7200脉冲控制说明》由会员分享,可在线阅读,更多相关《S7200脉冲控制说明(17页珍藏版)》请在装配图网上搜索。
1、S7-2O0 PLC脉冲输出MAP库文件的使用1概述S7-200提供了三种方式的开环运动控制:脉宽调制(PWM)-内置于S7-200,用于速度、位置或占空比控制。脉冲串输出(PTO)-内置于S7-200,用于速度和位置控制。 EM253位控模块-用于速度和位置控制的附加模块。S7200的内置脉冲串输出提供了两个数字输出通道(Q0.0和Q0.1),该数字 输出可以通过位控向导组态为PWM或PTO的输出。当组态一个输出为PTO操作时,生成一个50%占空比脉冲串用于步进电机或伺 服电机的速度和位置的开环控制。内置PTO功能仅提供了脉冲串输出。您的应 用程序必须通过PLC内置I/O或扩展模块提供方向和
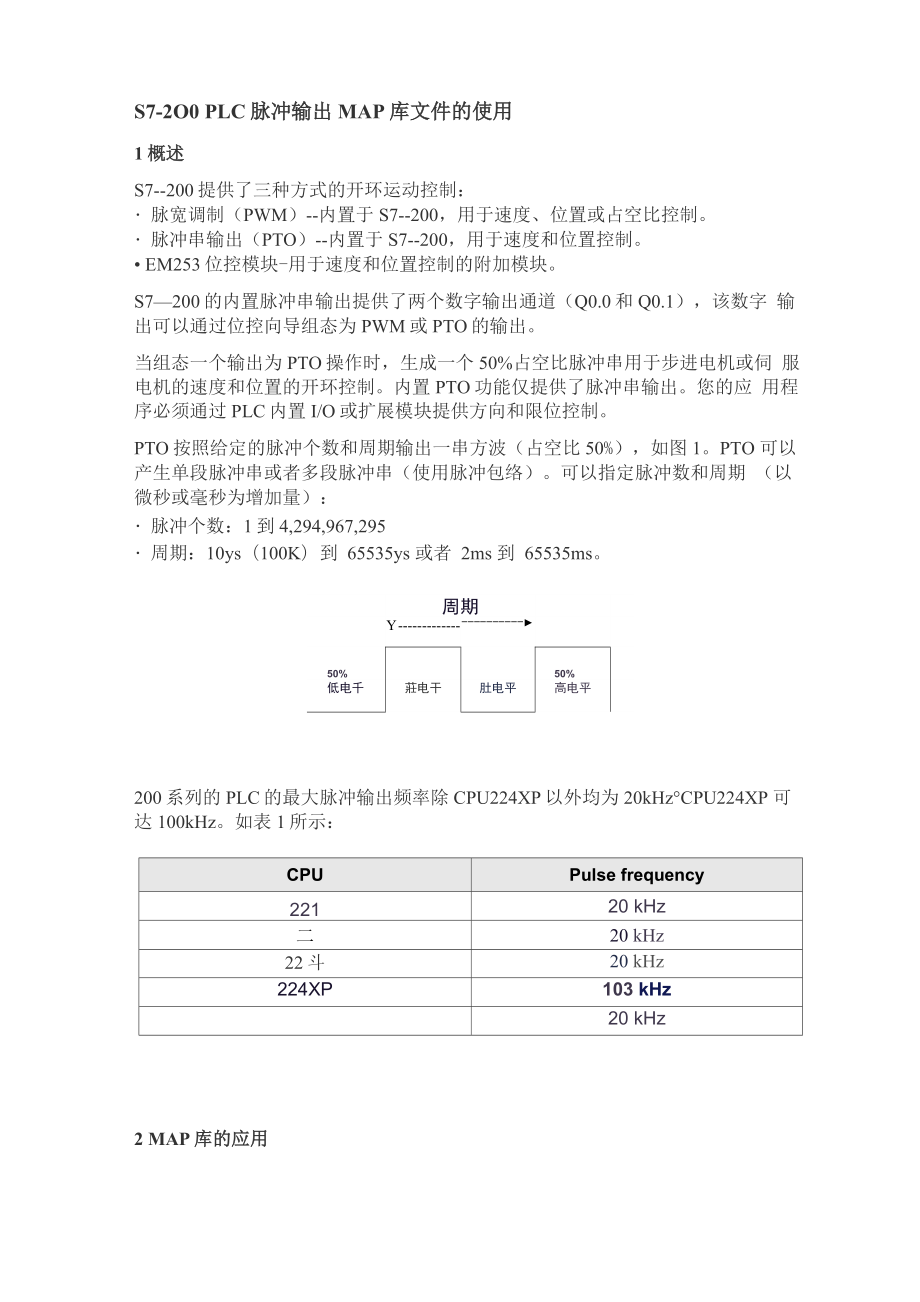
2、限位控制。PTO按照给定的脉冲个数和周期输出一串方波(占空比50%),如图1。PTO 可以产生单段脉冲串或者多段脉冲串(使用脉冲包络)。可以指定脉冲数和周期 (以微秒或毫秒为增加量):脉冲个数:1到4,294,967,295周期:10ys(100K)到 65535ys 或者 2ms 到 65535ms。周期Y50%50%低电千莊电干肚电平高电平200系列的PLC的最大脉冲输出频率除CPU224XP以外均为20kHzCPU224XP 可达100kHz。如表1所示:CPUPulse frequency22120 kHz二20 kHz22斗20 kHz224XP103 kHz20 kHz2 MAP库
3、的应用2.1 MAP库的基本描述现在,200系列PLC本体PTO 提供了应用库MAP SERV Q0.0和 MAP SERVQ0.1,分别用于Q0.0和Q0.1的脉冲串输出。如图2所示:5-JSERV Qa.O(-Q0_O_CTFiLQ0_0_MoveRelativeQ 0_0_M oveAbsolu teQ0_0_MoveVelocitjJQ0_0_HomeQ0_0_StopQ0_0_LoadP&sQ 0_0_Co mput e_R ate6cle_EU_PulseScle Pulse EUJPSERVQ0.1 (vl.ej-Q0_1_CTRLQ0_1_Mo7eFl elativeQ 0_1
4、 _M oveAbsolu teQ 0_1 _M oveVelocitjJQ0_1_HomeQ0_1_StopQ0_1_LoadPasQ 0_1 _Co mput e_R ateScle_EU_PukeScle Puls:e ELI图2注:这两个库可同时应用于同一项目。各个块的功能如表2所示:块功能Q0 x CTRL参数定义和控制QO x MoveRelative执行次相对位移运动QO x MoveAbsolute执行次绝对位移运动QO x MoveVelocity按预设的速度运动Q0 x Home寻找参考点位置Q0 x Stop停止运动Q0 x LoadPos重新装载当前位置Scale_EU
5、_Pulse将距离值转化为脉冲数Scale Pulse EU将脉冲数转化为距离值表2总体描述该功能块可驱动线性轴。为了很好的应用该库,需要在运动轨迹上添加三个限位开关,如图3: 一个参考点接近开关(home),用于定义绝对位置C_Pos的零点。两个边界限位开关,一个是正向限位开关(Fwd_Limit), 个是反向限位开关 (Rev_Limit)。C_Pos的计数值格式为绝对位置DINT ,所以其计数范围为(-2.147.483.648 to +2.147.483.647).ASmin以避免物件滑出轨道尽头。如果一个限位开关被运动物件触碰,则该 运动物件会减速停止,因此,限位开关的安置位置应当留
6、出足够的裕量III III 仃门HH打门门f汀f777 0 0Rev_LimitHomeFwd_Limit2.2输入输出点定义应用MAP库时,一些输入输出点的功能被预先定义,如表3所示:名称MAP SERV Q0.0MAP SERV Q0.1脉冲输出Q0.0Q0.1方向输出Q0.2Q0.3参考点输入I0.0I0.1所用的高速计数器HC0HC3高速计数器预置值SMD 42SMD 142手动速度SMD 172SMD 1822.3 MAP库的背景数据块为了可以使用该库,必须为该库分配68 BYTE (每个库)的全局变量,如图4 所示:图4下表是使用该库时所用到的最重要的一些变量(以相对地址表示),如
7、表4:符号名相对地址注释Disable_Auto_Stop+V0.0默认值=0意味着当运动物件已经到达预设地点 时,即使尚未减速到Velocity_SS,依然停止运 动;=1时则减速至Velocity SS时才停止Dir_Active_Low+V0.1方向定义,默认值0 =方向输出为1时表示正 向。Final Dir+V0.2寻找参考点过程中的最后方向Tune Factor+VD1调整因子(默认值=0)Ramp Time+VD5Ramp time = accel dec time (加减速时间)Max Speed DI+VD9最大输出频率=Velocity MaxSS Speed DI+VD1
8、3最小输出频率=Velocity SSHoming State+VB18寻找参考点过程的状态Homing Slow Spd+VD19寻找参考点时的低速(默认值=Velocity SS)Homing_Fast_Spd+VD23寻找参考点时的咼速(默认值=Velocity Max/2)Fwd Limit+V27.1正向限位开关Rev Limit+V27.2反向限位开关Homing Active+V27.3寻找参考点激活C Dir+V27.4当前方向Homing Limit Chk+V27.5限位开关标志Dec Stop Flag+V27.6开始减速PTOO_LDPOS_Error+VB28使用Q0
9、_x_LoadPos时的故障信息(16#00 =无 故障,16#FF =故障)Target Location+VD29目标位置accel dec time (格式:REAL)SS Speed real+VD37最小速度=Velocity SS (格式:REAL)Est Stopping Dist+VD41计算出的减速距离(格式:DINT)2.4功能块介绍下面逐一介绍该库中所应用到的程序块。这些程序块全部基于PLC-200的内置 PTO输出,完成运动控制的功能。此外,脉冲数将通过指定的高速计数器HSC计 量。通过HSC中断计算并触发减速的起始点。2.4.1 QO_x_CTRL该块用于传递全局参数
10、,每个扫描周期都需要被调用。功能块如图5,功能描述 见表5。SM0.0QO_0_CTRLENVD100-Velociti)_SSC_PoVD1Q4-Velocity_MawVD1Q8-accel_dec_timeV112.0-Fwd_LiMitV112.1-Rcy Limit-VD113图5参数类型格式单位意义Velocity_SSINDINTPulse/sec.启动/停止频率,必须是大于零的 数Velocity MaxINDINTPulse/sec.最大频率accel dec timeINREALsec.最大加减速时间Fwd LimitINBOOL正向限位开关Rev LimitINBOOL反
11、向限位开关C PosOUTDINTPulse当前绝对位置表5Velocity_SS是最小脉冲频率,是加速过程的起点和减速过程的终点。 Velocity_Max是最大小脉冲频率,受限于电机最大频率和PLC的最大输出频率。 在程序中若输入超出(Velocity_SS, Velocity_Max)范围的脉冲频率,将会被 Velocity_SS 或 Velocity_Max 所取代。accel_dec_time 是由 Velocity_SS 加速到 Velocity_Max 所用的时间(或由 Velocity_Max减速到Velocity_SS所用的时间,两者相等),范围被规定为0.02 32.0秒,
12、但最好不要小于0.5秒。警告:超出accel_dec_time范围的值还是可以被写入块中,但是会导致定位过 程出错!2.4.2 Scale_EU_Pulse该块用于将一个位置量转化为一个脉冲量,因此它可用于将一段位移转化为脉冲 数,或将一个速度转化为脉冲频率。功能块如图6,功能描述见表6。SMO.O匚hlVD140-Input1000-Pulses5.0-E UnitsScale EU Pulse utpul-VD144图6参数类型|格式|单位意义InputINREALmm or mm/s欲转换的位移或速度PulsesINDINTPulse /revol.电机转圈所需要的脉冲数E UnitsI
13、NREALmm /revol.电机转圈所产生的位移OutputOUTDINTPulse or pulse/s转换后的脉冲数或脉冲频率F面是该功能块的计算公式:P/flses TOiftput =inputE _ Units2.4.3 Scale_ Pulse_EU该块用于将一个脉冲量转化为一个位置量,因此它可用于将一段脉冲数转化为位 移,或将一个脉冲频率转化为速度。功能块如图7,功能描述见表7。SMO.OEMVD186-Input1000-Pulses5.0-E UnitsScale Pulse EUOutput-VD200图7参数类型|格式|单位意义InputINREALPulse or p
14、ulse/s欲转换的脉冲数或脉冲频率PulsesINDINTPulse /revol.电机转圈所需要的脉冲数E_UnitsINREALmm /revol.电机转圈所产生的位移OutputOUTDINTmm or mm/s转换后的位移或速度图8参数类型|格式|单位|意义EXECUTEINBOOL寻找参考点的执仃位PositionINDINTPulse参考点的绝对位移Start_DirINBOOL寻找参考点的起始方向(0=反向,1=正向)DoneOUTBOOL完成位(1=完成)ErrorOUTBOOL故障位(1=故障)F面是该功能块的计算公式:E UmtsOutput = =Input_Pulse
15、s 2.4.4 QO_x_Home功能块如图8功能描述见表8。SHAO0_0_ H 6mfeEHVI 2C.CEWE CUTE.-Fo$iiiortDoneVI30 3VI20.3该功能块用于寻找参考点,在寻找过程的起始,电机首先以Start_Dir的方向, Homing_Fast_Spd 的速度开始寻找;在碰到 limit switch (“Fwd_Limit” or “Rev_Limit”)后,减速至停止,然后开始相反方向的寻找;当碰至到参考点开关(input 10.0; withQ0_l_Home: 10.1)的上升沿时,开始减速到“Homing_Slow_Spd”。如果此时的方 向与“
16、Final_Dir”相同,则在碰到参考点开关下降沿时停止运动,并且将计数器 HC0的计数值设为“Position”中所定义的值。如果当前方向与“Final_Dir”不同,则必然要改变运动方向,这样就可以保证参 考点始终在参考点开关的同一侧(具体是那一侧取决于“Final_Dir”)。寻找参考点的状态可以通过全局变量“Homing_State”来监测,如表9:Homing State 的值意义0参考点已找到2开始寻找在相反方向,以速度Homing_Fast_Spd继续寻找过程(在 碰到限位开关或参考点开关之后)6发现参考点,开始减速过程7在方向Final_Dir,以速度Homing_Slow_S
17、pd继续寻找过程 (在参考点已经在Homing_Fast_Spd的速度卜被发现之 后)10故障(在两个限位开关之间并未发现参考点)2.4.5 QO_x_MoveRelative该功能块用于让轴按照指定的方向,以指定的速度,运动指定的相对位移。功能 块如图9,功能描述见表10。SMO.OI I1 1VD134VD144-V1Z0.1-EXECUTENum_PulstsDeneVelcxi/Dlecfor-VIG91图9参数类型|格式|单位意义EXECUTEINBOOL相对位移运动的执行位Num_PulsesINDINTPulse相对位移(必须1)VelocityINDINTPulse/sec.预
18、置频率(Velocity_SS = Velocity CUTE蚁D1宙I- PosilimOonEVD1J4- YWu-V150.1图10参数类型|格式单位意义EXECUTEINBOOL绝对位移运动的执行位PositionINDINTPulse绝对位移VelocityINDINTPulse/sec.预置频率(Velocity_SS = Velocity v=Velocity_Max) 完成位(1=完成)DoneOUTBOOL表112.4.7 QO_x_MoveVelocity该功能块用于让轴按照指定的方向和频率运动,在运动过程中可对频率进行更 改。功能块如图11,功能描述见表12。V10D.D
19、C klVD1J4-EXECUTEVelocityEirarV12QL1 -QisclionG PosVB105VD19B图11参数类型|格式|单位意义EXECUTEINBOOL执行位VelocityINDINTPulse/sec.预置频率(Velocity_SS = Velocity =Velocity Max)DirectionINBOOL预置方向(0=反向,1=正向)ErrorOUTBYTE故障标识(0=无故障,1=立即停止,3=执行 错误)C PosOUT DINT Pulse当前绝对位置表12注意:QO_x_MoveVelocity功能块只能通过QO_x_Stop block功能块来
20、停止轴的 运动。如图12:图122.4.8 Q0_x_Stop该功能块用于使轴减速直至停止。功能块如图13,功能描述见表13。(JD_O_SlcpV1900 I1 PENEMEOJFQflOE -V1SD 1图13参数类型格式单位意义EXECUTEINBOOL执行位DoneOUTBOOL完成位(1=完成)表132.4.9 Q0_x_LoadPos该功能块用于将当前位置的绝对位置设置为预置值。功能块如图14,功能描述 见表14。Q0_O_LaaFafENV17D0I珥EXECUTF-KlewPoi:DeneLrrar 匚Fqs-WJ IVD172图14参数类型|格式|单位|意义EXECUTEIN
21、BOOL设置绝对位置的执行位New_PosINDINTPulse预置绝对位置DoneOUTBOOL完成位(1=完成)ErrorOUTBYTE故障位(0=无故障)C PosOUTDINTPulse当前绝对位置表14注意:使用该块将使得原参考点失效,为了清晰地定义绝对位置,必须重新寻找 参考点。2.5校准该块所使用的算法将计算出减速过程(从减速起始点到速度最终达到Velocity_SS)所需要的脉冲数。但时在减速过程中所形成的斜坡有可能会导致计 算出的减速斜坡与实际的包络不完全一致。此时就需要对“Tune_Factor”进行校 正。校正因子 “Tune_Factor”“Tune_Factor” 的
22、最优值取决于最大、最小和目标脉冲频率以及最大减速时间。 如图15:如图所示,运动的目标位置是B,算法会自动计算出减速起始点,当计算与实际 不符时,当轴已经运动到B点时,尚未到达最低速度,此时若位”Disable_Auto_Stop” = 0,则轴运动到B点即停止运动,若位”Disable_Auto_Stop” = 1,则轴会继续运动直至到达最低速度。图中所示的情 况为计算的减速起始点出现的太晚了。确定调整因子注意:一次新的校准过程并不需要将伺服驱动器连接到CPU。步骤如下:1. 置位 ”Disable_Auto_Stop”,即令 ”Disable_Auto_Stop” = 1。2. 设置 “T
23、une_Factor” = 1。3. 使用Q0_x_LoadPos功能将当前位置的绝对位置设为0。4. 使用Q0_x_MoveRelative,以指定的速度完成一次相对位置运动(留出足够 的空间以使得该运动得以顺利完成)。5. 运动完成后,查看实际位置HC0。Tune_Factor的调整值应由HC0,目标相 对位移Num_Pulses,预估减速距离Est_Stopping_Dist所决定。Est_Stopping_Dist由下面的公式计算得出:Velocity1 rt/acJA SS1 accei dec thneEst Stappiug Djsr =:=WScitr Max - JVbcTv
24、 SS2Tune_Factor由下面的公式计算得出:仆 HCQ - Nimi Puhes + Est StoppniDistTune Factor =比占一Est _ Stopping _6.在调用QO_x_CTRL的网络之后插入一条网络,将调整后的Tune_Factor传 递给全局变量+VD1,如图16。SM0.1J1ENMOV_RENOSI1.0002-INOUT-VD1图167.复位 ”Disable_Auto_Stop”,即令 ”Disable_Auto_Stop” = 0。2.6寻找参考点的若干种情况在寻找参考点的过程中由于起始位置、起始方向和终止方向的不同会出现很多种 情况。一个总
25、的原则就是:从起始位置以起始方向Start_Dir开始寻找,碰到参考点之 前若碰到限位开关,则立即调头开始反向寻找,找到参考点开关的上升沿(即刚 遇到参考点开关)即减速到寻找低速Homing_Slow_Spd,若在检测到参考点开 关的下降沿(即刚离开遇到参考点开关)之前已经减速到Homing_Slow_Spd, 则比较当前方向与终止方向Final_Dir是否一致,若一致,则完成参考点寻找过 程;若否,则调头找寻另一端的下降沿。若在检测到参考点开关的下降沿(即刚 离开遇到参考点开关)之前尚未减速到Homing_Slow_Spd,则在减速到 Homing_Slow_Spd后调头加速,直至遇到参考点
26、开关上升沿,重新减速到 HomingSloWSpd,最后判断当前方向与终止方向Final_Dir是否一致,若一致,则完成参考点寻 找过程;若否,则调头找寻另一端的下降沿。(Final_Dir决定寻找参考点过程 结束后,轴停在参考点开关的哪一侧)下面的图形会反应不同情形下寻找参考点的过程。Start_Dir=0, Final_Dir=0,如图 17:KevLimirtHomeStartI图17Start_Dir=0, Final_Dir=1,如图 18:图18Start_Dir=l, Final_Dir=O,如图 19:wmeStartFwd Lirmt图19Start_Dir=1, Final_Dir=1,如图 20:呦仃Home ,HFwd Limit图20
- 温馨提示:
1: 本站所有资源如无特殊说明,都需要本地电脑安装OFFICE2007和PDF阅读器。图纸软件为CAD,CAXA,PROE,UG,SolidWorks等.压缩文件请下载最新的WinRAR软件解压。
2: 本站的文档不包含任何第三方提供的附件图纸等,如果需要附件,请联系上传者。文件的所有权益归上传用户所有。
3.本站RAR压缩包中若带图纸,网页内容里面会有图纸预览,若没有图纸预览就没有图纸。
4. 未经权益所有人同意不得将文件中的内容挪作商业或盈利用途。
5. 装配图网仅提供信息存储空间,仅对用户上传内容的表现方式做保护处理,对用户上传分享的文档内容本身不做任何修改或编辑,并不能对任何下载内容负责。
6. 下载文件中如有侵权或不适当内容,请与我们联系,我们立即纠正。
7. 本站不保证下载资源的准确性、安全性和完整性, 同时也不承担用户因使用这些下载资源对自己和他人造成任何形式的伤害或损失。
