 电机选型计算公式
电机选型计算公式

《电机选型计算公式》由会员分享,可在线阅读,更多相关《电机选型计算公式(17页珍藏版)》请在装配图网上搜索。
1、附录1:根据负载条件选用电机电机轴上有两种负载,一种是转矩负载,另一种是惯量负载。选用电机时,必须准确计 算这些负载,以便确保满足如下条件: (1).当机床处于非切削工作状态时,在整个速度范围内负载转矩应小于电机的连续额定 转矩。如果在暂停或以非常低的速度运行时,由于摩擦系数增大,使得负载转矩增大并超 过电机的额定转矩,电机有可能出现过热。另一方面,在高速运行时,如果受粘滞 性影响,而使转矩增大且超过额定转矩,由于不能获得足够的加速转矩,加速时间 常数有可能大大增加。 (2).最大切削转矩所占时间(负载百分比即“ON”时间)满足所期望的值。 (3).以希望的时间常数进行加速。一般来说,负载转矩
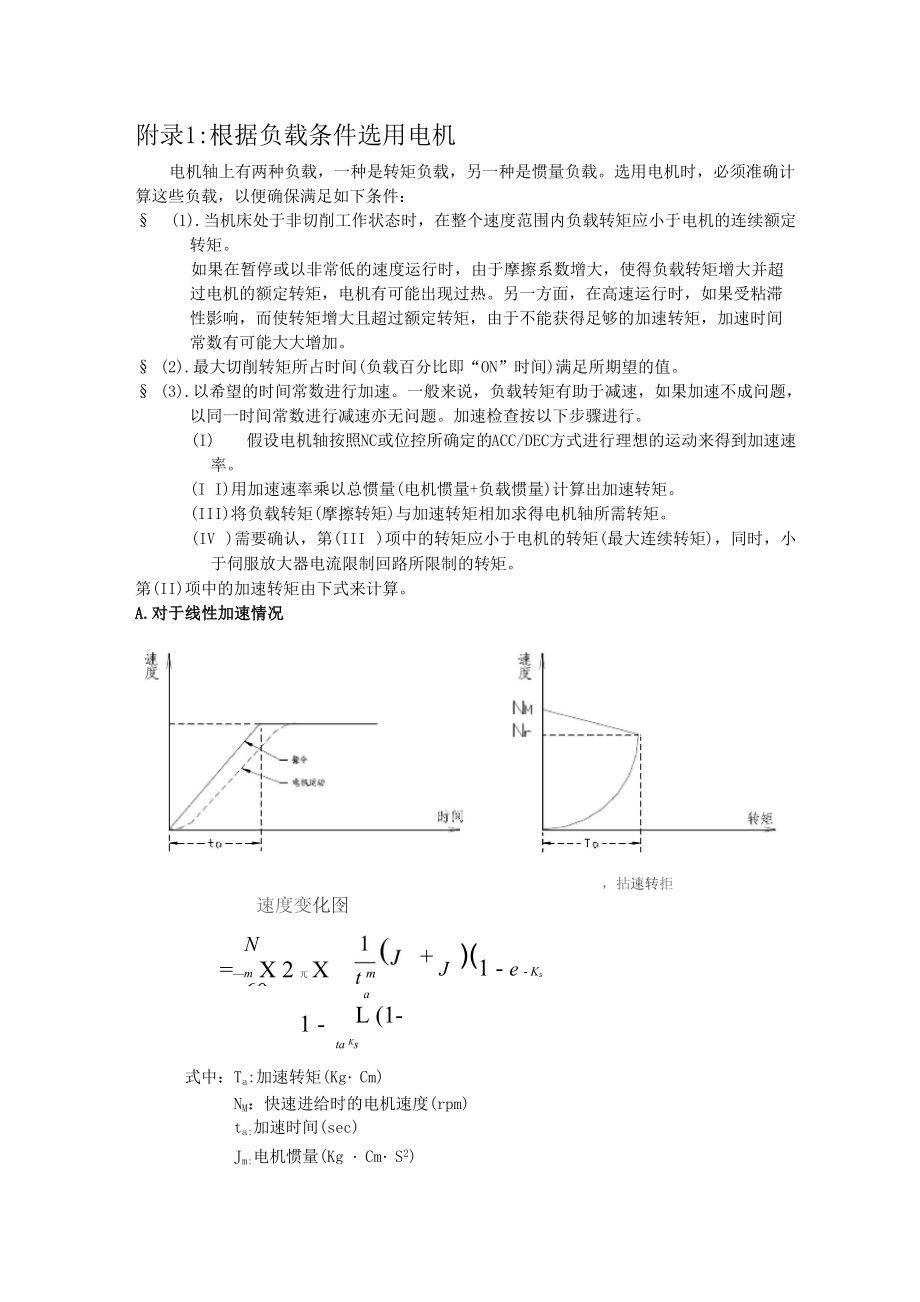
2、有助于减速,如果加速不成问题, 以同一时间常数进行减速亦无问题。加速检查按以下步骤进行。(I) 假设电机轴按照NC或位控所确定的ACC/DEC方式进行理想的运动来得到加速速 率。(I I)用加速速率乘以总惯量(电机惯量+负载惯量)计算出加速转矩。(III)将负载转矩(摩擦转矩)与加速转矩相加求得电机轴所需转矩。(IV )需要确认,第(III )项中的转矩应小于电机的转矩(最大连续转矩),同时,小 于伺服放大器电流限制回路所限制的转矩。第(II)项中的加速转矩由下式来计算。,拈速转拒图A.对于线性加速情况速度变化囹N=m X 2 兀 X601 -ta Ks+t maL (1-J )(1 - e
3、- ks,a ) i式中:Ta:加速转矩(KgCm)NM:快速进给时的电机速度(rpm)ta:加速时间(sec)Jm:电机惯量(Kg CmS2)J :负载惯量(KgCmS2)Nr:加速转矩减小时的始点(不同于Nm)(rpm)Ks:伺服位置环增益(Sec-1)B.对于指数加减速情况建一度及化图TnTo不同速度所需的加速转矩INii图中:T0Nm X 2 兀601KK =一,a e tKeSN_X_T =-ma 60x2兀 x a 1a(qN - N1 a 1amXrmlK丰气时,K(J + J)K = K,时,N .m X 2 兀60(1、1 e )(Jm + J),式中,e - 2.718=0
4、.632 NC.指令速度突加情况T - Nm X 2兀 X 1(J + J)S式中,=KK (4).快进频率:一般来讲,在正常切削加工中,此项不成问题,但对于特殊加工设备来说(如冲压、 钻床、激光加工、包装机械等),要求频繁快速进给,此时,需要检查是否由于频 繁加、减速而使电机过热。在这种情况下,应计算每个循环电机转矩的均方根(RMS) 值,以保证此值小于电机的额定转矩。TRMS式中:G + T )t + T 21 +G T )t + T21a f 1 f 2 a f 10 3一tt0Ta:加速转矩Tf:摩擦转矩To:停止时的转矩 (5).当负载条件在一个循环周期内变化不定时,TRMS按下式计
5、算,并确认此值在电机的 额定转矩范围内。FT 21 + T 21 + T 21 + T 21T = , _12233nnRMSt0式中:to=tl+t2+t3+tn (6).负载惯量限制负载惯量的大小对于伺服系统的动态性能及快进加/减速时间有很大影响。对 于大的负载惯量,当指令速度改变时,电机需要更长的时间达到指令速度,当多轴 联动进行圆弧插补切削时,跟踪误差就大于较小惯量时的情况从而影响加工精度。通常,当负载惯量小于电机转子惯量时,上述问题不会出现。如果大于转子惯 量3倍,动态影响就会变差,用于加工普通金属的机械,还不存在任何实际问题。不 过,在诸如以高速加工各种形状复杂的木材的木工机械等特
6、殊场合,最好使负载惯 量小于转子惯量。当负载惯量大于转子惯量3倍时,就会牺牲响应时间。如果大大超过3倍,恐怕超出 伺服放大器的参数调整范围,因此,应避免这种使用。由于机械设计限制,而无法 小于3倍转子惯量时。附录2:负载转矩计算施加于电机轴上的负载转矩通常用以下简单公式计算。式中:TL:电机轴上的负载转矩(住-cm)F :需要使滑台(工作台或刀架)以轴向运动的力(Kg)n :传动系统的效率。i:电机轴每转机械移动量Tc:不包含在“n”内的滚珠丝杠副,轴承等部件折算到电机轴上的摩擦转矩。F取决于工作台重量,摩擦系数,水平或垂直方向的切削推力,垂直轴场合是否配重平衡等因素。在水平方面使用场合,、F
7、值大小下图所给举例计算如下:非切削时间:F = u(W + fg)切削时间:F = F + u(W + fg + FCf )式中:W:滑台重量(工作台及工件)(Kg)四NJU:摩擦系数fg:拉紧销拉紧力Fc:由切削力产生的反向推力(Kg)Fcf:工作台相对导轨表面由切削运动而产生的力(Kg)计算转矩时,务必注意如下几点:(1)必须充分考虑由于拉紧销的夹紧产生的摩擦转矩。一般来说,由滑动体的重量和摩擦 系数计算出的转矩值很小。请务必注意由于拉紧销的夹紧力及滑台表面的精度而产生 的转矩。(2)有两种情况不可忽略,一种是由于滚珠和滚珠螺母的预紧力引起的滚动接触部件的摩 擦转矩,另一种是丝杠的预紧力产
8、生的摩擦转矩。特别对于小型机械来讲,此转矩对 整个转矩有很大影响,因此,必须加以考虑。(3)必须考虑由于切削反作用力引起的滑动表面摩擦力的增大因素。一般来说,切削反作 用力的吸收点与驱动力的吸收点不在同一位置,滑动体表面的负载就会由于吸收大的切削反作用力而产生的运动而增大,如下图所示。计算切削过程中的转矩时,必须考 虑由于这种负载而引起的摩擦转矩的增大。(4)进给速率对摩擦转矩产生很大影响。必须对不同速度下摩擦力的变化,工作台支撑体 (滑台,滚动体,静压),滑动体表面材料及润滑条件进行研究和测量,以便得到准确数据。(5)通常,即使是同一种机械,摩擦转矩也依调整状态,环境温度或润滑条件等因素而发
9、 生变化。计算负载转矩时,请设法对同种机械进行测量,并对测量数据进行处理以便 得到准确数值。也就是说,必须对夹紧力,间隙进行调整,来有效地控制摩擦转矩, 以便避免产生过大转矩。另一种计算折合到电机轴上的负载转矩的方法如下:T = 9.8;*,P(N m)(水平直线运动轴)l2n R 门式中:PB:滚珠丝杠螺距(m)1/R:减速比T = O 行:wPR(N m)(垂直直线运动轴)L2k R f式中:Wc:配重块重量(Kg)T = (N m)(旋转轴运动)L R f式中:T :负载转矩(N m)附录3:负载惯量计算与负载转矩不同的是,只通过计算即可得到负载惯量的准确数值。不管是直线运动还 是旋转运
10、动,对所有由电机驱动的运动部件的惯量分别计算,并按照规则相加即可得到负载 惯量。由以下基本公式就能得到几乎所有情况下的负载惯量。1. 圆柱体的惯量由下式计算有中心轴的圆柱体的惯量。如滚珠丝杠,齿轮等。兀yJk 32 乂 980(Kg cm sec2)或 Jk 3L D4 Gg m2 ) 式中:Y:密度(Kg/cm3) 铁:y 7.87X 10-3Kg/cm3=7.87X 103Kg/m3铝:y - 2.70X10-3Kg/cm3=2.70X 103Kg/m3Jk:惯量(Kg cm sec2)(Kg m2)D :圆柱体直径(cm) . (m)L :圆柱体长度(cm) . (m)2. 直线运动体的
11、惯量用下式计算诸如工作台、工件等部件的惯量, w ( p V (J =b IKg - cm - sec2li980 k 2k)=巧件2Gg -m2)式中:W :直线运动体的重量(Kg)PB:以直线方向电机每转移动量(cm)或(m)3. 有变速机构时折算到电机轴上的惯量Z2 , Z1 :齿轮齿数JL1-cm - sec2) Gg - m2)4. 具有图中所示旋转中心的圆柱体的惯量-cm - sec2)J = J +方2式中:J0:圆柱体中心周围的惯量板g - cm - sec2)M:圆柱体重量(Kg)R:旋转半径(cm)5. 空心圆柱体的惯量J = 一罡一 -Ld 4 - D J32 x 980
12、01式中:Y:密度(Kg/cm3)L :柱体长度(cm)Do:柱体外径(cm)D1:柱体内径(cm)6. 对于垂直轴直线运动,当有配重时,务必考虑配重体的惯量,此时,-Ggm2)式中:Wc:配重体重量(Kg)1/R:减速比PB:滚珠丝杠螺距(m)附录4:运转功率及加速功率计算在电机选用中,除惯量、转矩之外,另一个注意事项即是电机功率计算。一般可按下式 求得。1.运转功率计算P =2 ”. nm T060(W)式中:P :运转功率(W)N :电机运行速度(rpm) MT :负载转矩(N -m)2.加速功率计算式中:P :加速功率(W)aNm :电机运行速度(rpm)J :负载惯性(kg - m2
13、)* :加速时间常数(sec)附录5:定位控制用伺服电机选用指南1. 几个基本问题就一般而言,定位控制系统有两种结构形式。一种是全闭环位置控制系统,其位置 检测元件一般采用光栅或感应同步器,这种控制结构虽然可获得较高的精度,但由于传动机 构的间隙,误差等非线性因素影响,系统的稳定性往往受其影响,调整起来比较困难但在 大多数场合,采用另一种方法,即半闭环位置控制系统即可满足定位精度要求,其位置检测 元件一般采用与电机同轴安装的光电脉冲编码器或旋转变压器。即便是具有插补功能的轮廓 控制也是如此。其典型结构如下:对于这种结构的定位系统来说,有如下几个基本问题需要考虑: (1)位置检测单位(mm/脉冲
14、)A_ 1000-p_ FpG R k K式中:PB:滚珠丝杠螺距(m)FB :脉冲编码器每转脉冲数(P/r)PG:k :脉冲编码器反馈脉冲的细分比。K :脉冲编码器反馈脉冲倍乘比 (2)指令脉冲频率(v ) sv _ 1000坦(PPS )s 60 A式中:匕:进给速率(m/min)此值不能大于位置伺服系统的最大接收脉冲频率。(3)PG反馈脉冲频率(VFBVFB_PG60)(PPS )式中:V :电机速度(r/min)此值不能大于位置伺服系统的最大PG反馈脉冲频率。(4)位置环增益(KP),误差计数器跟踪脉冲(8)a. 指令脉冲阶跃输入am V=Kpt W履.t(脉冲)式中:tam:最小加速
15、时间式中:cl=3(e1000脉冲)、:最小减速时间T 2. t + T 2 -1 + T 2. t T W PMamLcPMdmRms t式中:T :伺服放大器峰值转矩 PMT :电机轴上的负载转矩 Cb. 指令脉冲线性输入Kp = 30 (1/S)使用交流伺服时(脉冲)七七0.100.15(s)使用交流伺服时 V s K pF t 2. t + T 2 -1 + T 2. t ( N ,m)T w PaLeSdRMSt式中:七:所需起动转矩小项)TS:所需制动转矩 (N.m)t :起动时间(S) 七 tt;:制动时间(S)td - tmdm(5)电气环节定位精度A = (脉冲)(伺服系统速
16、度控制范围)X mR式中:N :电机速度(r/min)Nr :伺服电机额定速度(r/min)2. 应用举例某机械机构设计为:进给速度:直线运动体重量:V =15m/min iM=80Kg定位次数:运动行程:n=40/minl =0.25m滚珠丝杠长:Lg=0.8m定位时间:t 1.2sec滚珠丝杠直径:DB=0.016mm电气定位精度:5=0.01mm滚珠丝杠螺距:Pg=0.05m摩擦系数:U=0.2联轴器重量:联轴器直径:MK=0.3KgDK=0.03m机械效率:n=0.9 (90%)(1)速度图(2)速度(3)(4)(5)60 t =n6040 =15(S)t = t ,t = 01 (S
17、)ads60l t = t t = 12ams V 60 x 0.25-01 15lt = 12 - 01 - 01 x 2 = 0.9 (S)=01 (S)要求驱动电机速度:N =,= % = 3000(尸/min)l p 0.05采用直联结构,所以减速比1/R=1/1N = NR = 3000 x 1 = 3000(r / min)电机速度:故:负载转矩负载惯量9.8p M PB2兀R 门滚珠丝杠:联轴器:9.8 x .2 x 80 x 0.005 = 0139(N m)2兀 x 1 x 0.9r p 120.005、J = MB-=80 xlL1V 2kR JV 2 兀 x 1J直线运动
18、体: DB2 = 0507 x 10-4 Gg m2)l 4兀J =Y L b 32电机轴上的负载惯量:=32 x 7.87 x 103 x 08 x(0.016)4=0.405 x 10-4 (Kg m2)1 x 0.3 x(0.03)2 =0.338 x 10-4 (Kg m2) J” + Jb + Jc = 125 x 10-4 Gg m2)负载运行功率:2脂 3000 x 0139 = 437 (讪60(6)负载加速功率:(2k )P =- N a V 60 m J2 J =竺 x 3000t v 60 J2 125 x 10-4 x60=1234(W)(7)暂选伺服系统选用条件:T
19、电机额定转矩L额定输出功率:200 (W)额定转矩:0.6 (N-m)电机惯量:12 x 10-4 Kg - m2 /PG脉冲数:2500 (P/r)a.所需加速转矩_ 2 兀N(J + J )P 60tL2兀 x 3000 x(12 +125)x 10一460 x 01+ 0139=0.908(N - m)峰值转矩可用b.所需制动转矩_ 2兀N (J + J )_ 2兀 x 3000(12 +125)x 10-4,60t l60 x 01-0139=0.769(N -m)峰值转矩可用P + P = (12)电机额定输出 a 0N 电机额定速度 MJ 伺服系统的允许负载惯量 L根据以上条件,暂
20、选用3000rpm系列200W 1FT-5042-0AF01伺服电机及POS528定位单元 +PAC06伺服驱动系统。额定数据如下:额定转速:3000 (r/min)峰值转矩:1.8 ( N - m )伺服系统的允许负载惯量:36 x 10-4 Kg - m2)(8) 伺服电机确认c. 转矩均方根值T 2 -1 + T 2 -1 + T 2 -1:(0.908)2 x 01 +(0139 )2 x 0.9 +(0.769x 01T = . PaLcSd =.,RMS t15=0.326(N - m) 额定转矩可用(9) ?6反馈脉冲倍乘比位置检测单位A=0.001mm/p由于要求电气定位精度
21、5 =0.01mm 因此 完全可以满足要求。PG反馈脉冲细分比k=1K _1000p_1000 x 0.005_ 2_ A-FpG R k 0.001 x 2500x 1 x 1 _(10) 指令脉冲频率:1吐 _ 1000 x 15 _ 250000(PPS)60 A60 x 0.001(11) 误差计数器跟踪脉冲位置环增益、_ 30(1/ S)= IT = 250000 = 8333 (脉冲)K 30p(12) 电气定位精度4 土:N = 8333000(伺服系统速度控制范围)X m5000 X 3000R=1.67(脉冲)=0.00167(mm)|Ae | = 0.00167(mm) 5 = 0.01(mm)从以上计算数据分析结果如下:选用的伺服系统满足设计要求。3. 单位换算表量的名称单位换算系数SICGS力NKgf1N = 0.10197 Kgf 1Kgf = 9.80665N重量KgKgf1Kg = 1Kgf转矩N mKgf m1N - m = 0.10197 Kgf - m 1Kgf -m = 9.80665N -m,GD 2惯量(J =)4Kg - m2gf - cm - S21Kg -m2 = 1.0197 x 104 gf -cm- s2 1gf - cm - s2 = 0.980665 x 10-4 Kg - m2
- 温馨提示:
1: 本站所有资源如无特殊说明,都需要本地电脑安装OFFICE2007和PDF阅读器。图纸软件为CAD,CAXA,PROE,UG,SolidWorks等.压缩文件请下载最新的WinRAR软件解压。
2: 本站的文档不包含任何第三方提供的附件图纸等,如果需要附件,请联系上传者。文件的所有权益归上传用户所有。
3.本站RAR压缩包中若带图纸,网页内容里面会有图纸预览,若没有图纸预览就没有图纸。
4. 未经权益所有人同意不得将文件中的内容挪作商业或盈利用途。
5. 装配图网仅提供信息存储空间,仅对用户上传内容的表现方式做保护处理,对用户上传分享的文档内容本身不做任何修改或编辑,并不能对任何下载内容负责。
6. 下载文件中如有侵权或不适当内容,请与我们联系,我们立即纠正。
7. 本站不保证下载资源的准确性、安全性和完整性, 同时也不承担用户因使用这些下载资源对自己和他人造成任何形式的伤害或损失。
