 机械手传感器的系统设计
机械手传感器的系统设计

《机械手传感器的系统设计》由会员分享,可在线阅读,更多相关《机械手传感器的系统设计(5页珍藏版)》请在装配图网上搜索。
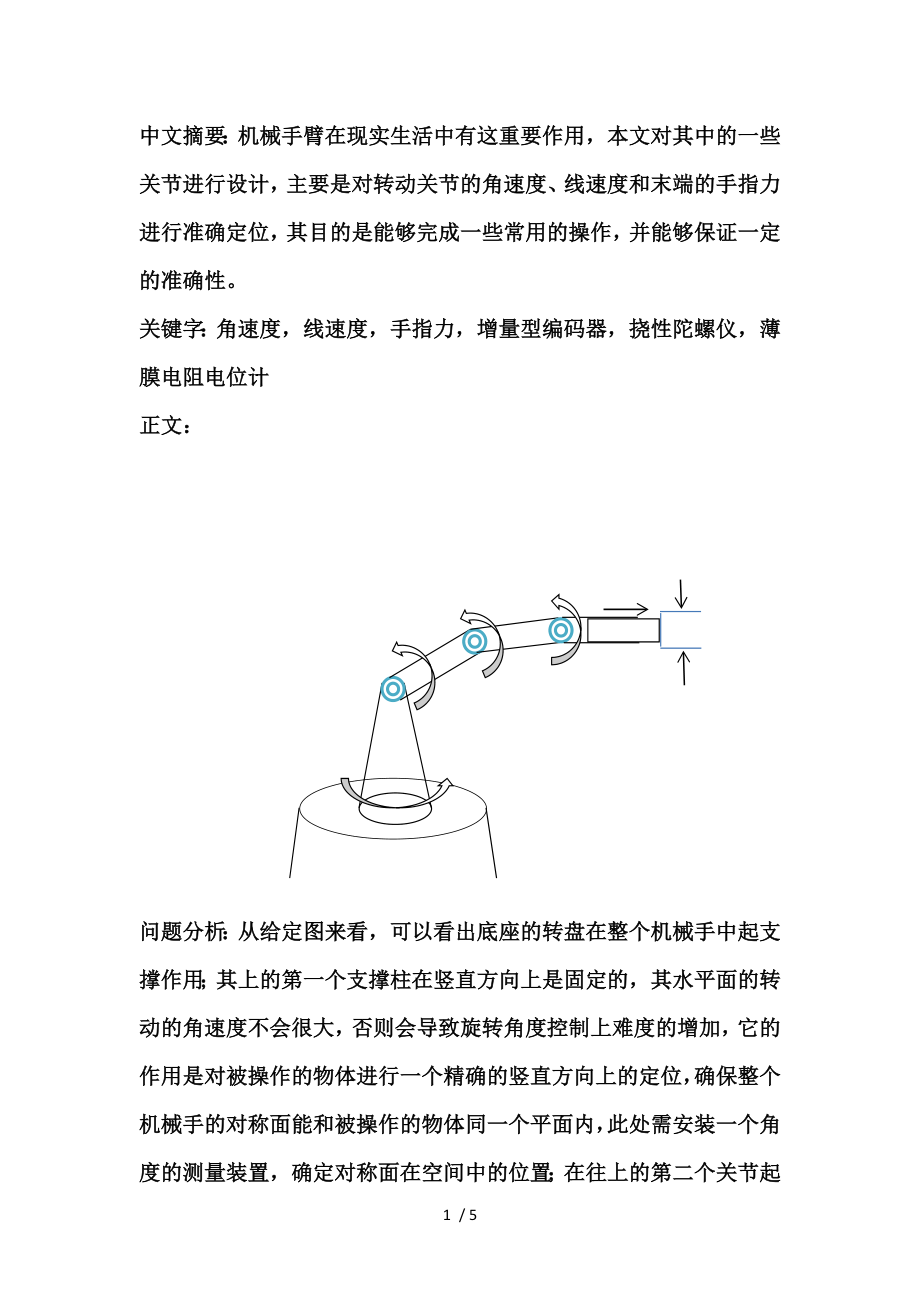
1、中文摘要:机械手臂在现实生活中有这重要作用,本文对其中的一些关节进行设计,主要是对转动关节的角速度、线速度和末端的手指力进行准确定位,其目的是能够完成一些常用的操作,并能够保证一定的准确性。关键字:角速度,线速度,手指力,增量型编码器,挠性陀螺仪,薄膜电阻电位计正文:问题分析:从给定图来看,可以看出底座的转盘在整个机械手中起支撑作用;其上的第一个支撑柱在竖直方向上是固定的,其水平面的转动的角速度不会很大,否则会导致旋转角度控制上难度的增加,它的作用是对被操作的物体进行一个精确的竖直方向上的定位,确保整个机械手的对称面能和被操作的物体同一个平面内,此处需安装一个角度的测量装置,确定对称面在空间中
2、的位置;在往上的第二个关节起一种粗调节的作用,主要是在对整个末端与被操作的物体的水平方向上的统一,其精度要求可以不是很高,也需要安装一个角度测量仪器;第三个关节要求较为严格,它的主要作用是在于被操作物体在水平空间的统一,保证其角度的合理性,是“手指”能够与被操作物体在空间上相互之间的接触合适,同时能够是末端在空间里旋转,其测量的精度必须达到一定的要求的设备才能够采用;末端后端为一个伸缩控件,进行轴向运动,完成径向操作,需要一个位置测量器件,返回被操作物体与目标位置的距离;末端前端为一个压力感受控件,能够测量被两个夹片之间的压力大小,并完成将其数据传输给手臂的MCU,经过数据处理后,接受MCU的
3、数据指令,进行力量大小的控制,输出适量大小的力,同时上面还应该有接近觉感知器,保证在机械手臂旋转时不与障碍物碰撞,在于障碍物接触前进行测距,并将信息反馈给MCU,为其完成合理操作提供数据支持。整个机械手的旋转过程,其关节2、3只需在半平面内旋转即可,对于反向位置的操作,可以旋转关节1达到相应的竖直位置后配合关节2、3完成操作。解决方案:根据以上的分析,在精度、成本和运用环境的综合考虑后,选择如下:底座:内部安装对整个机械手的控制操作系统MCU,完成对测量数据的处理,并发出合理的指令解决问题。关节1:测量的为水平方向一个自由度的物理量,测量角度精度高,转速不是很快的,灵敏度高,旋转空间能够达到整
4、个圆周范围内的,并且测量线速度与角速度,将数据返回MCU进行处理,选择高分辨率的1024线增量型旋转编码器,精确的角度达到=3601024=0.3515625,满足一般的现实需求,其水平安装在关节1以下的旋转位置,通过LED显示灯与光电探测器测量旋转的角度(转换成了弧度值),再经信号调谐电路的初处理后送往MCU,配合MCU自带的计时功能测量旋转角度所占用的时间T,计算旋转的角速度=T,同时MCU接受来自末端前端的测量障碍物的信号来对旋转驱动电机的速度进行控制,必要时可以使电机反向运动,避开障碍物,在要求很高的场合下,可以使用精度多个传感器配合使用,达到二倍、四倍分辨率测量,准确定位。在MCU中
5、,根据计算所得的角速度和各个臂的长度、关节1、2之间的夹角(测量数据)、伸缩臂的伸长量(测量数据)来计算末端的线速度。关节2:测量的为竖直方向上一个自由度的物理量,在竖直平面内运动,由于其粗调节作用而精度要求不高,使用磁电式的角速度传感器,永磁铁的对称面与机械手臂的对称面重合,在测量旋转角度和对应MCU的时间t(惊醒合适的时间测量,一般选择比较长一些,并认为此段时间内是匀速转动,由于是粗调节,保证了测量的合理性),则可以计算出旋转的角速度=t,经MCU处理后,控制对应的电机,调节转速;同时对仪器的初始状态进行记录,并由MCU将角度对时间进行积分,根据初始的角度值计算当前的角度,即关节2、3之间
6、手臂的竖直方向夹角,用于计算末端的线速度。关节3:测量物理量为二维的物理量,即竖直方向上的旋转角度和截面方向上的旋转角度,竖直方向上的角度用于水平定位,截面方向上的角度用于旋转机械手臂的末端部分,使之能够完成颠倒的操作,精度要求高,定位准确,同时将旋转角度传回系统的MCU,用于数据的处理,所以选择挠性陀螺进行测量角度,其安装的位置如下:陀螺仪的竖直轴保证与关节2、3之间的手臂重合,使在旋转的过程中两者的运动具有协调统一性,减小摩擦的影响,在测量所得的角度传回系统的MCU后经过时间的处理后得到相应的角速度,经积分达到从初始位置旋转的角度,可用于为计算末端的线速度提供数据。末端:末端的后端位置需要
7、控制手臂的伸长量,前段检测障碍,同时检测手指力的大小,并在其上集成了接近觉传感器,用于检测整个手臂末端所处的周围环境的变化和定位目标位置,保证操作的安全性和准确性,将测量数据返回,用于数据处理和状态判断,所以后端需使用位置传感器,经前端的接近觉传感器便可输出相应的功率控制电机完成一定距离的伸长,根据要求使用薄膜电阻电位计,使其输出线性性高,操作准确,并且将伸长量传回MCU,计算末端的线速度;手指力大小很关键,精度很高,在上下两个夹持面分别安装一个应变计,测量用力的大小,并将数据返回,根据相应的压力大小,控制两个夹片的距离,从而控制施加在物体上的力,保证输出的合理性;对于末端还需安装一个接近觉传
8、感器,检测周围的环境,此处使用光接近觉传感器,利用红外发光二极管和光敏接收管,利用接收到的光波判断周围障碍物或者是目标的位置变化,经MCU分析后输出指令,使其躲避或跟踪当前检测到的物体。感想:机械手臂的设计用到了很多的传感器元件,他们之间相互配合使用完成相应的测量和定位,在不同的位置,其精度要求不同,应合理选取适当的测量仪器,达到相应的效果。既要考虑到精度有要考虑到价格,综合处理方可完善。参考资料:1采摘机械手结构设计王俊杰、王丽丽山东信息职业技术学院2010.102光栅角位移加速度角加速度测量仪刘海山东大学威海分校控制工程系1996.07.303转台角速度的测量于治会沈阳新乐电工厂5 / 5
- 温馨提示:
1: 本站所有资源如无特殊说明,都需要本地电脑安装OFFICE2007和PDF阅读器。图纸软件为CAD,CAXA,PROE,UG,SolidWorks等.压缩文件请下载最新的WinRAR软件解压。
2: 本站的文档不包含任何第三方提供的附件图纸等,如果需要附件,请联系上传者。文件的所有权益归上传用户所有。
3.本站RAR压缩包中若带图纸,网页内容里面会有图纸预览,若没有图纸预览就没有图纸。
4. 未经权益所有人同意不得将文件中的内容挪作商业或盈利用途。
5. 装配图网仅提供信息存储空间,仅对用户上传内容的表现方式做保护处理,对用户上传分享的文档内容本身不做任何修改或编辑,并不能对任何下载内容负责。
6. 下载文件中如有侵权或不适当内容,请与我们联系,我们立即纠正。
7. 本站不保证下载资源的准确性、安全性和完整性, 同时也不承担用户因使用这些下载资源对自己和他人造成任何形式的伤害或损失。
