《自动控制原理之非线性控制系统的相平面分析总结》由会员分享,可在线阅读,更多相关《自动控制原理之非线性控制系统的相平面分析总结(8页珍藏版)》请在装配图网上搜索。
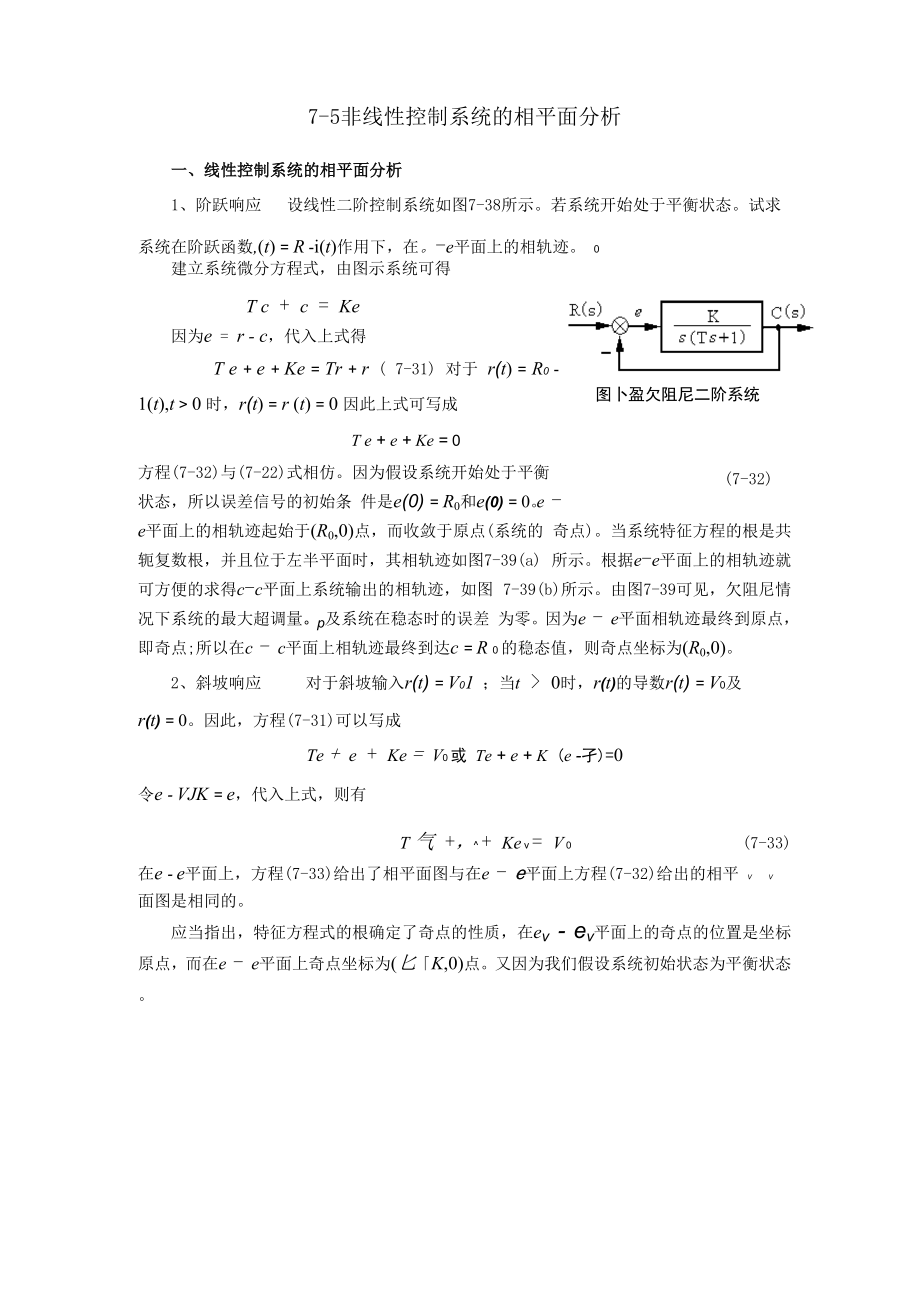
1、7-5非线性控制系统的相平面分析一、线性控制系统的相平面分析1、阶跃响应设线性二阶控制系统如图7-38所示。若系统开始处于平衡状态。试求系统在阶跃函数,(t) = R -i(t)作用下,在。-e平面上的相轨迹。 0T c + c = Ke图卜盈欠阻尼二阶系统(7-32)建立系统微分方程式,由图示系统可得因为e = r - c,代入上式得T e + e + Ke = Tr + r ( 7-31) 对于 r(t) = R0 - 1(t),t 0 时,r(t) = r (t) = 0 因此上式可写成T e + e + Ke = 0方程(7-32)与(7-22)式相仿。因为假设系统开始处于平衡状态,所
2、以误差信号的初始条 件是e(0) = R0和e(0) = 0。e - e平面上的相轨迹起始于(R0,0)点,而收敛于原点(系统的 奇点)。当系统特征方程的根是共轭复数根,并且位于左半平面时,其相轨迹如图7-39(a) 所示。根据e-e平面上的相轨迹就可方便的求得c-c平面上系统输出的相轨迹,如图 7-39(b)所示。由图7-39可见,欠阻尼情况下系统的最大超调量。p及系统在稳态时的误差 为零。因为e - e平面相轨迹最终到原点,即奇点;所以在c - c平面上相轨迹最终到达c = R 0 的稳态值,则奇点坐标为(R0,0)。2、斜坡响应对于斜坡输入r(t) = V01 ;当t 0时,r(t)的导
3、数r(t) = V0及r(t) = 0。因此,方程(7-31)可以写成Te + e + Ke = V0 或 Te + e + K (e -孑)=0令e - VJK = e,代入上式,则有T 气 +, + Ke v = V 0(7-33)在e - e平面上,方程(7-33)给出了相平面图与在e - e平面上方程(7-32)给出的相平 VV面图是相同的。应当指出,特征方程式的根确定了奇点的性质,在ev - ev平面上的奇点的位置是坐标 原点,而在e - e平面上奇点坐标为(匕K,0)点。又因为我们假设系统初始状态为平衡状态。所以误差信号的初始值e(0) = 0, e(0) =匕。如果式(7-33)
4、的特征根是处于左半平 面的共轭复数根时,则在e - e平面上的相轨迹为如图7-40所示。由上面分形向右平移V/K之外,其他与阶跃输入时完全相同。另外,当系统在斜坡输入时,相轨迹最终不是到原点而是卷入奇点(匕;K,0)。这表示系统在斜坡输入时呈现的稳态误差为 匕K。二、非线性控制系统的相平面分析当非线性元件静特性可以用分段直线来表示时,这样的非线性系统就可以用几个分段线 性系统来描述。这时,整个相平面可以划分成若干个区域,其中每一个区域相应于一个单独 的线性工作状态。相应地每一个区域都有一个奇点,不过这个奇点有时可能不一定在本区域 之内,而是在其它区域。如果奇点位于本区域之内,则称为实奇点;如果
5、奇点位于本区域之 外,那么该区内的相轨迹就永远不可能到达该点,因此,称这样的奇点为虚奇点。具有分段 线性特性的二阶系统,一般只有一个实奇点,因此与具有实奇点的区域相邻接的所有区域都 将具有虚奇点。每一个奇点的位置和性质,都取决于相应区域的运动方程。每一个区域的相 平面图均表示一个相应线性系统的相平面图。有了这些相平面图以后,只要在区域的边界线 上,把相应的相轨迹连接起来,就可构成整个系统的完整的相轨迹。下面举例说明具体做法。1、具有非线性增益的控制系统 设如图7-41(a)所示的非线性控制系统,图中Gn表 示的方块是一个非线性放大器,其静特性如图7-41(b)所示,当误差信号e的数值大于e1或
6、 小于e1时,放大器的增益k分别等于1或小于1,即(ee em = i.1(7-34)kee 0时,r = r = 0,所以式(7-35)成为T e + e + Km = 0(7-36)上式即为非线性系统在单位阶跃作用下的误差微分方程。将式(7-34)代入式(7-36)得下 列两个线性微分方程:Te + e + Ke = 0e| e】(7-36a)Te + e + Kkm = 0|e| e(7-36b)在下面的分析中,假设方程(7-36a)为欠阻尼的运动方程,其特征根为具有负实部的共轭 复数根,对应的相轨迹如图7-42(a)所示,奇点(0,0)为稳定焦点。假设方程(7-36b)为 过阻尼的运动
7、方程,相应的特征根为两个负实根,相轨迹如图7-42(b)所示,奇点(0,0)为 稳定节点。根据方程(7-36a)和(7-36b)所确定的相应区域,将图7-42(a)和图7-42(b)组合在一 起就可得到图7-41所示非线性系统的相轨迹图,如图7-43所示。图中系统参数为:T = 1, k = 0.0625,K = 4 和 ei = 0.2。图7-41系统欠阻尼 和过阻尼时相轨迹图7-41系统单位阶跃 响应的相轨迹由图7-43可知,相平面被分割成三个区域: 着方程(7-36b),而在这个区域以外相轨迹由方 程(7-36a)确定。相轨迹起始于A点,该点由初 始条件e(0) = 0,,e(0) =
8、0确定。从A点出发 的相轨迹,首先沿7-42(a )所示相轨迹运动,并 “企图”收敛到稳定焦点(虚奇点,坐标原点)。在直线e =匕和e = -匕限定的区域内对应图7-44欠阻尼二阶系统然而,当相点(描述点)运动到B点,即到达 本区域的边界线e = e1线上时,若继续运动将越出边界而进入新的区域。因此,相轨迹将在8点发生转换,B点是上一区域的终点,同时也是下一区域的起点。从B点开始直至再发生下一次转换为止,相点将沿图7-42(b)所示相迹 运动而企图收敛到稳定节点(0,0)。但是在C点,系统又一次发生转换,相轨迹趋向于收敛 虚奇点(稳定焦点)。同样,当相点到达。点时又将发生转换如此反复继续下去,
9、直至 最后相轨迹进入七区域,不再越出并最终收敛到稳定节点,即实奇点(0,0)为止。可见, 非线性系统的整个相轨迹为ABCDEFO,如图7-43的实线所示。显然,系统在阶跃输入下稳态误差为零。图7-43中用虚线描绘的相轨迹为图7-44所示欠阻尼二阶系统在单位阶跃 作用下的相轨迹图。比较这两条相轨迹,可见前者所对应的阶跃响应特性比后者要好。首先 收敛速度快,即系统速度性提高了,其 次,超调量小。对于较小的阶跃输入, 响应甚至是无超调的。对于中等大小的 阶跃输入,系统的阶跃响应具有一次超 调。对于大的阶跃输入,虽然在系统的 响应曲线中可能出现超调和反向超调, 但其超调量肯定比图7-44所示的线性 系
10、统要小。图7-41所示系统在典型阶 跃输入时的误差响应曲线如图7-45。2、继电系统在图7-41所示非线性随动系统中, 将放大器换成继电器,并假定继电器具有理想的继电特性,系统结构图如图7-46所示。理(7-37)图7-46继电系统想继电器特性的数学表达式为fle0m = I-1e0假设系统初始状态为静止平衡状态。继电系 统运动方程为T e + e + Km = Tr + r对于阶跃输入r(t) = R0 - 1(t),当t0时,有r=r=0,所以上式为(7-38)(7-38a)(7 38 幻T e + e + Km = 0将式(7-37)代入上式得方程组fTe + e + K = 0e0Te
11、 + e - K = 0e 0显然,两个方程均为线性微分方程。因为继电特性是由两条直线段组成,所以两条直线段内 继电系统的特性仍为线性的,只是在继电器切换时才表现出非线性特性。de 将e = 丁 代入(7-38)式,则有 dedeTe + e + Km = 0 dede = _ T de Km + e对上式两边进行积分得相轨迹方程由假设条件:e0e = e0 + Te0 - Te + TKm ln=R0,% = 0代入上式可得e + Kme + Km0代入m值则有(7-39)(7 - 39a)(7 - 398)3、速度反馈对继电系统阶跃响应的影响设系统结构图如图7-48所示,图中x 00 K
12、JW e A 一e = R -xe - TKIn - +1e 0的区域内按方程(7-39a)变化,到达e轴A点时,继电器切换,相轨迹方程按方 程(7-39b)变化。这样依次进行,最后趋于坐标原点(0,0),得系统完整的相轨迹如图7-47。 另外由图可见,相轨迹转换均在纵轴上,这种直线称为开关线,它表示继电器工作状态的转 换。这时理想继电特性的数学表达式为m1I-1e +诺 0e +ce 0时,r = r = 0,上式为T e + e + Km = 0将式(7-40)代入式(7-41 )得方程组Te + e + K = 0e +e 0Te + e - K = 0e +xe 0(7 - 42a)0
13、 K Je = R - Te - TK lnf- +1e +xe 0(7 - 42。)I 0 K J由上两式边界条件可得开关线方程为e +T e = 0(7-43)根据开关线方程及相轨迹方程可作出系统的相轨迹,如图7-49所示。将此相轨迹图与图7-47 比较,可看出两者主要是开关线不同。未接入速度反馈 时,开关线为e = 0的虚轴;在接入速度反馈后,开关线 逆时针转了一个角度甲=arctant 0由于开关线逆时针方 向转动的结果,相轨迹将提前进行切换,这样就使得系 统阶跃响应的超调量减小,调节时间缩短,系统的动态 性能得到改善。由于开关线转角随着速度反馈强度的增 大而增大,因此,当t T时,系统性能将随着速度反馈强度的增大而得到改善。综上所述,相平面法一般可解决下列问题:(1)相平面上可以清晰地表示出系统在各种初始条件下的所有可能的运动;(2)相平面上可用奇点来分析系统的稳定性;(3)相平面上可用极限环来分析系统的自振稳定性;(4)由相轨迹可以求出系统的瞬态响应。
 自动控制原理之非线性控制系统的相平面分析总结
自动控制原理之非线性控制系统的相平面分析总结