 安全监控(线性回归、陀螺仪)
安全监控(线性回归、陀螺仪)

《安全监控(线性回归、陀螺仪)》由会员分享,可在线阅读,更多相关《安全监控(线性回归、陀螺仪)(7页珍藏版)》请在装配图网上搜索。
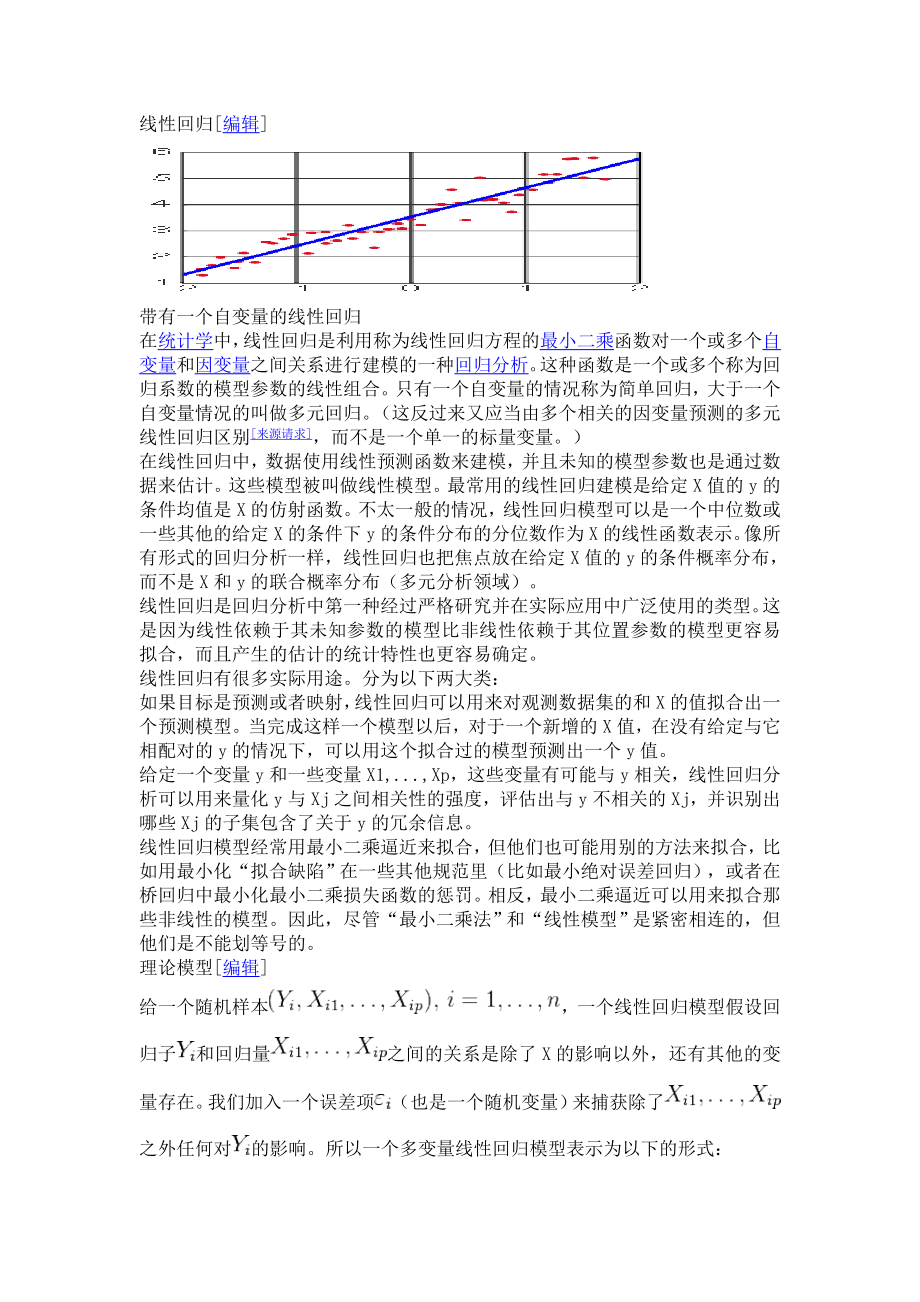
1、线性回归编辑带有一个自变量的线性回归在统计学中,线性回归是利用称为线性回归方程的最小二乘函数对一个或多个自变量和因变量之间关系进行建模的一种回归分析。这种函数是一个或多个称为回归系数的模型参数的线性组合。只有一个自变量的情况称为简单回归,大于一个自变量情况的叫做多元回归。(这反过来又应当由多个相关的因变量预测的多元线性回归区别来源请求,而不是一个单一的标量变量。)在线性回归中,数据使用线性预测函数来建模,并且未知的模型参数也是通过数据来估计。这些模型被叫做线性模型。最常用的线性回归建模是给定X值的y的条件均值是X的仿射函数。不太一般的情况,线性回归模型可以是一个中位数或一些其他的给定X的条件下
2、y的条件分布的分位数作为X的线性函数表示。像所有形式的回归分析一样,线性回归也把焦点放在给定X值的y的条件概率分布,而不是X和y的联合概率分布(多元分析领域)。线性回归是回归分析中第一种经过严格研究并在实际应用中广泛使用的类型。这是因为线性依赖于其未知参数的模型比非线性依赖于其位置参数的模型更容易拟合,而且产生的估计的统计特性也更容易确定。线性回归有很多实际用途。分为以下两大类:如果目标是预测或者映射,线性回归可以用来对观测数据集的和X的值拟合出一个预测模型。当完成这样一个模型以后,对于一个新增的X值,在没有给定与它相配对的y的情况下,可以用这个拟合过的模型预测出一个y值。给定一个变量y和一些
3、变量X1,.,Xp,这些变量有可能与y相关,线性回归分析可以用来量化y与Xj之间相关性的强度,评估出与y不相关的Xj,并识别出哪些Xj的子集包含了关于y的冗余信息。线性回归模型经常用最小二乘逼近来拟合,但他们也可能用别的方法来拟合,比如用最小化“拟合缺陷”在一些其他规范里(比如最小绝对误差回归),或者在桥回归中最小化最小二乘损失函数的惩罚。相反,最小二乘逼近可以用来拟合那些非线性的模型。因此,尽管“最小二乘法”和“线性模型”是紧密相连的,但他们是不能划等号的。理论模型编辑给一个随机样本,一个线性回归模型假设回归子和回归量之间的关系是除了X的影响以外,还有其他的变量存在。我们加入一个误差项(也是
4、一个随机变量)来捕获除了之外任何对的影响。所以一个多变量线性回归模型表示为以下的形式:其他的模型可能被认定成非线性模型。一个线性回归模型不需要是自变量的线性函数。线性在这里表示的条件均值在参数里是线性的。例如:模型在和里是线性的,但在里是非线性的,它是的非线性函数。数据和估计编辑区分随机变量和这些变量的观测值是很重要的。通常来说,观测值或数据(以小写字母表记)包括了n个值 .我们有个参数需要决定,为了估计这些参数,使用矩阵表记是很有用的。其中Y是一个包括了观测值的列向量,包括了未观测的随机成份以及回归量的观测值矩阵:X通常包括一个常数项。如果X列之间存在线性相关,那麽参数向量就不能以最小二乘法
5、估计除非被限制,比如要求它的一些元素之和为0。古典假设编辑样本是在母体之中随机抽取出来的。因变量Y在实直线上是连续的,残差项是独立且相同分布的(iid),也就是说,残差是独立随机的,且服从高斯分布。这些假设意味着残差项不依赖自变量的值,所以和自变量X(预测变量)之间是相互独立的。在这些假设下,建立一个显示线性回归作为条件预期模型的简单线性回归,可以表示为:最小二乘法分析编辑主条目:最小二乘法最小二乘法估计编辑回归分析的最初目的是估计模型的参数以便达到对数据的最佳拟合。在决定一个最佳拟合的不同标准之中,最小二乘法是非常优越的。这种估计可以表示为:回归推论编辑对于每一个,我们用代表误差项的方差。一
6、个无偏误的估计是:其中是误差平方和(残差平方和)。估计值和实际值之间的关系是:其中服从卡方分布,自由度是对普通方程的解可以冩为:这表示估计项是因变量的线性组合。进一步地说,如果所观察的误差服从正态分布。参数的估计值将服从联合正态分布。在当前的假设之下,估计的参数向量是精确分布的。其中表示多变量正态分布。参数估计值的标准差是:参数的置信区间可以用以下式子来计算:误差项可以表示为:单变量线性回归编辑单变量线性回归,又称简单线性回归(simple linear regression, SLR),是最简单但用途很广的回归模型。其回归式为:为了估计和,我们有一个样本最小二乘法就是将未知量残差平方和最小化
7、:分别对和求导得到正规方程:此线性方程组可以用克莱姆法则来求解:协方差矩阵是:平均响应置信区间为:预报响应置信区间为:方差分析编辑在方差分析(ANOVA)中,总平方和分解为两个或更多部分。总平方和SST (sum of squares for total) 是:,其中:同等地:回归平方和SSReg (sum of squares for regression。也可写做模型平方和,SSM,sum of squares for model) 是:残差平方和SSE (sum of squares for error) 是:总平方和SST又可写做SSReg和SSE的和:回归系数R2是:稳健回归编辑将平
8、均绝对误差最小化,不同于在线性回归中是将均方误差最小化。陀螺仪(角运动检测装置)编辑陀螺仪是用高速回转体的动量矩敏感壳体相对惯性空间绕正交于自转轴的一个或二个轴的角运动检测装置。利用其他原理制成的角运动检测装置起同样功能的也称陀螺仪。1装置介绍编辑绕一个支点高速转动的刚体称为陀螺(top)。通常所说的陀螺是特指对称陀螺,它是一个质量均匀分布的、具有轴对称形状的刚体,其几何对称轴就是它的自转轴。 与苍蝇退化的后翅(平衡棒)原理类似。陀螺仪原理图在一定的初始条件和一定的外在力矩作用下,陀螺会在不停自转的同时,环绕着另一个固定的转轴不停地旋转,这就是陀螺的旋进(precession),又称为回转效应
9、(gyroscopic effect)。陀螺旋进是日常生活中常见的现象,许多人小时候都玩过的陀螺就是一例。1人们利用陀螺的力学性质所制成的各种功能的陀螺装置称为陀螺仪(gyroscope),它在科学、技术、军事等各个领域有着广泛的应用。比如:回转罗盘、定向指示仪、炮弹的翻转、陀螺的章动等。陀螺仪的种类很多,按用途来分,它可以分为传感陀螺仪和指示陀螺仪。传感陀螺仪用于飞行体运动的自动控制系统中,作为水平、垂直、俯仰、航向和角速度传感器。指示陀螺仪主要用于飞行状态的指示,作为驾驶和领航仪表使用。陀螺仪分为,压电陀螺仪,微机械陀螺仪,光纤陀螺仪和激光陀螺仪,它们都是电子式的,并且它们可以和加速度计,
10、磁阻芯片,GPS,做成惯性导航控制系统。结构基本上陀螺仪是一种机械装置,其主要部分是一个对旋转轴以极高角速度旋转的转子,转子装在一支架内;在通过转子中心轴XX1上加一内环架,那么陀螺仪就可环绕平面两轴作自由运动;然后,在内环架外加上一外环架;这个陀螺仪有两个平衡环,可以环绕平面2三轴作自由运动,就是一个完整的太空陀螺仪(space gyro)。历史1850年法国的物理学家莱昂傅科(J.Foucault)为了研究地球自转,首先发现高速转动中地的转子 陀螺仪结构3(rotor),由于它具有惯性,它的旋转轴永远指向一固定方向,他用希腊字 gyro(旋转)和skopein(看)两字合为gyro sco
11、pei 一字来命名这种仪表。陀螺仪是一种既古老而又很有生命力的仪器,从第一台真正实用的陀螺仪器问世以来已有大半个世纪,但直到现在,陀螺仪仍在吸引着人们对它进行研究,这是由于它本身具有的特性所决定的。陀螺仪最主要的基本特性是它的稳定性和进动性。人们从儿童玩的地陀螺中早就发现高速旋转的陀螺可以竖直不倒而保持与地面垂直,这就反映了陀螺的稳定性。研究陀螺仪运动特性的理论是绕定点运动刚体动力学的一个分支,它以物体的惯性为基础,研究旋转物体的动力学特性。原理陀螺仪的原理就是,一个旋转物体的旋转轴所指的方向在不受外力影响时,是不会改变的。人们根据这个道理,用它来保持方向,制造出来的东西就叫做陀螺仪。陀螺仪在
12、工作时要给它一个力,使它快速旋转起来,一般能达到每分钟几十万转,可以工作很长时间。然后用多种方法读取轴所指示的方向,并自动将数据信号传给控制系统。在现实生活中,陀螺仪发生的进给运动是在重力力矩的作用下发生的。特性陀螺仪被广泛用于航空、航天和航海领域。这是由于它的两个基本特性:一为定轴性(inertia or rigidity),另一是进动性(precession),这两种特性都是建立在角动量守恒的原则下。定轴性当陀螺转子以高速旋转时,在没有任何外力矩作用在陀螺仪上时,陀螺仪的自转轴在惯性空间中的指向保持稳定不变,即指向一个固定的方向;同时反抗任何改变转子轴向的力量。这种物理现象称为陀螺仪的定轴
13、性或稳定性。其稳定性随以下的物理量而改变:1.转子的转动惯量愈大,稳定性愈好; 陀螺仪2.转子角速度愈大,稳定性愈好。所谓的“转动惯量”,是描述刚体在转动中的惯性大小的物理量。当以相同的力矩分别作用于两个绕定轴转动的不同刚体时,它们所获得的角速度一般是不一样的,转动惯量大的刚体所获得的角速度小,也就是保持原有转动状态的惯性大;反之,转动惯量小的刚体所获得的角速度大,也就是保持原有转动状态的惯性小。进动性当转子高速旋转时,若外力矩作用于外环轴,陀螺仪将绕内环轴转动;若外力矩作用于内环轴,陀螺仪将绕外环轴转动。其转动角速度方向与外力矩作用方向互相垂直。这种特性,叫做陀螺仪的进动性。进动角速度的方向取决于动量矩H的方向(与转子自转角速度矢量的方向一致)和外力矩M的方向,而且是自转角速度矢量以最短的路径追赶外力矩。如右图。进动方向这可用右手定则判定。即伸直右手,大拇指与食指垂直,手指顺着自转轴的方向,手掌朝外力矩的正方向,然后手掌与4指弯曲握拳,则大拇指的方向就是进动角速度的方向。进动角速度的大小取决于转子动量矩H的大小和外力矩M的大小,其计算式为进动角速度=M/H。进动性的大小也有三个影响的因素:1.外界作用力愈大,其进动角速度也愈大;2.转子的转动惯量愈大,进动角速度愈小;3.转子的角速度愈大,进动角速度愈小。
- 温馨提示:
1: 本站所有资源如无特殊说明,都需要本地电脑安装OFFICE2007和PDF阅读器。图纸软件为CAD,CAXA,PROE,UG,SolidWorks等.压缩文件请下载最新的WinRAR软件解压。
2: 本站的文档不包含任何第三方提供的附件图纸等,如果需要附件,请联系上传者。文件的所有权益归上传用户所有。
3.本站RAR压缩包中若带图纸,网页内容里面会有图纸预览,若没有图纸预览就没有图纸。
4. 未经权益所有人同意不得将文件中的内容挪作商业或盈利用途。
5. 装配图网仅提供信息存储空间,仅对用户上传内容的表现方式做保护处理,对用户上传分享的文档内容本身不做任何修改或编辑,并不能对任何下载内容负责。
6. 下载文件中如有侵权或不适当内容,请与我们联系,我们立即纠正。
7. 本站不保证下载资源的准确性、安全性和完整性, 同时也不承担用户因使用这些下载资源对自己和他人造成任何形式的伤害或损失。
![[世界上发觉最大古代出土青铜器]最大古代出土青铜器](/Images/s.gif)