 自平衡车模型分析
自平衡车模型分析

《自平衡车模型分析》由会员分享,可在线阅读,更多相关《自平衡车模型分析(7页珍藏版)》请在装配图网上搜索。
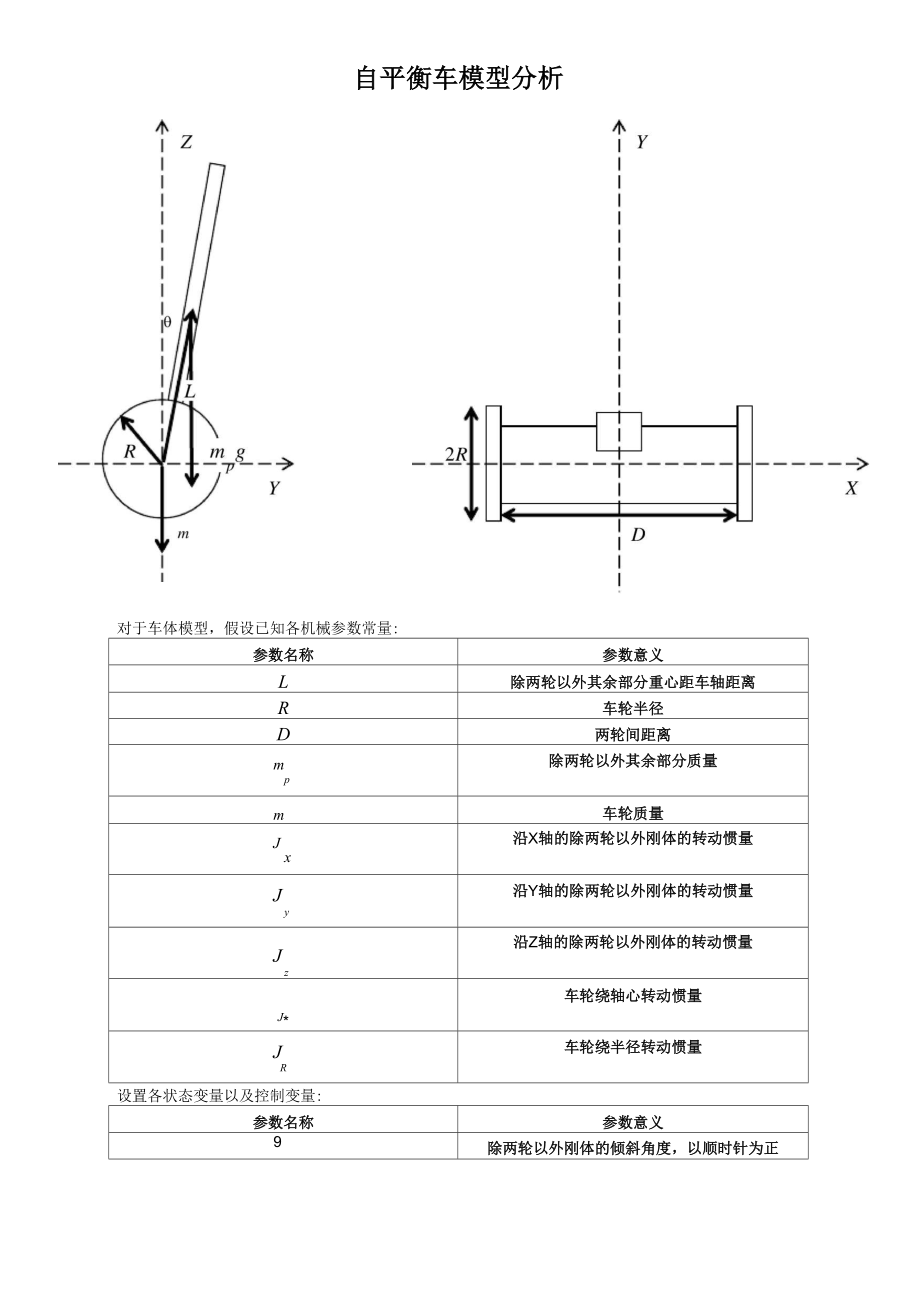
1、自平衡车模型分析对于车体模型,假设已知各机械参数常量:参数名称参数意义L除两轮以外其余部分重心距车轴距离R车轮半径D两轮间距离mp除两轮以外其余部分质量m车轮质量Jx沿X轴的除两轮以外刚体的转动惯量Jy沿Y轴的除两轮以外刚体的转动惯量Jz沿Z轴的除两轮以外刚体的转动惯量J*车轮绕轴心转动惯量JR车轮绕半径转动惯量设置各状态变量以及控制变量:参数名称参数意义9除两轮以外刚体的倾斜角度,以顺时针为正0L左轮转过角度,以顺时针为正0R右轮转过角度,以顺时针为正ML左轮电机力矩,以顺时针为正MR右轮电机力矩,以顺时针为正一、求解车体除两轮外部分动能通过拉格朗日方程对其进行动力学分析。车体沿X轴方向速度
2、:,ci V = L0 cos 0+ 也一R) R车体沿Y轴方向速度:,Qi ci V = L sin 0(。l R)R车体沿Z轴方向速度V = L0 sin 0z车体沿过质心的7轴的转动惯量为:J 6 = J cos2 0 + J sin2 0 + jjj yzdm由于假设车体关于ZY平面对称,因此jjf yzdm = 0因此J 0 = J cos2 0 + J sin2 0则可以得到车体的平动动能:Ekp1=(L0 cos0 +(l +。r)R)2 + (Lsin0212(0 -0 )LRDR)2 + (L0 sin0 )2J车体的转动动能为:E Jkp 22=(J cos2 0 + J
3、sin2 0)(-(0 -0 )LRDR)2 + J 0 2x7则车体的总动能为:Ep = Ep 2二、求解车轮动能左车轮平动速度为:右车轮平动速度为V =0 RWRX R两轮有同样的绕垂直于半径的转动速度:* *(0 -0 )八=L D R R则左车轮的动能为:EkWj1=m211 (0 R)2 + J 0 2 + J L 2 4 L 2(0 -0 )R)L DRk D 7则右车轮的动能为:Ekw R1=m211 (0 R)2 + -J 0 2 + J R 2 4 R 2(0 -0 )R)L DRk D 7求解车体势能由于在平地上行进,车轮势能不变。车体整体势能可变部分表示为:E = m g
4、 cos 0四、拉格朗日函数的求解得到最终的拉格朗日函数为:kp1+ Ep 2 + EkwEkwL - Ep依据拉格朗日动力学法求解,进行如下运算:d 3L适耳=-Mdt 30d牛30Ldt7 3Ld 30RdLdt八=M30 RR得到动力学方程: 方程一:/ tt.-rC(m L2 + J )0 + m Lcos0 , ,(0, +0。)LR2 R 一 m gL sin 0 - m L + J 一 J Zin0 cos0=-M - ML R方程X*X,、 一/x , ,1 .1. m (0+0)R2()(0 -0)R2m LR0 cos 0m LR0 2 sin 0 +pL R+ m L2
5、sin 2 0 + J sin 2 0 + J cos2 0 l r 2 p2 p4pyzd 2R 2(0 -0 )R 2sin0 cos0(0 -0 )- + mR20 + J0 + 2J l R= M方程三:.X,X, 、 一/x , ,1 .1. m (0+。)R2()(0-0)R2m LR0 cos0一 m LR0 2 sin0 + ?LR一 m L2 sin2 0 + J sin2 0 + J cos2 0 tr2 p2 p4pyzd 2()R2 k x-(0 -0 )R2一 2 m t + J - J 0 sin0 cos0(0 -0 )+ mR20 + J 0 - 2J tr=
6、Mp y zL r D 2R 9 R R D 2R五、方程中各项的力学意义分析方程一中:(m L2 + J )0表示的是让车体产生0的角加速度,应该产生的合力矩为(mpE + J, )0,其中转轴为 车轮中心。 (0 +0 )八m L cos0 l 2 r R是以车底盘为参考系而产生的非惯性力的力矩。m gL sin 0是重力产生的力矩。)sin 0 cos 0、2R是离心力的力矩。-M - ML R为电机产生的力矩。方程二中:对于轮子的受力分析中,由于车体自身有加速度以及角加速度,因此需要从轮轴给 予车体一定的力产生加速度。在轮子上,由于轮轴收到车体的反作用力,为了让轮子产 生抵消车轮轴心收
7、到的作用力,需要由地面给予车轮额外的作用力。因而为了让车轮能 够以预计的角加速度运转,力矩不仅要为角加速度提供力矩,还应克服地面产生的作用 力的力矩。12 m LR0 cos 0为使车体产生水平加速度所需要的力对轮子产生的力矩,该加速度为转动速度改变造成的加速度水平分量m (0 +0 ) R 2pLR4为使车体产生水平加速度所需要的力对轮子产生的力矩,该加速度为底盘的加速度。与 之前加起为总的水平加速度。12 m LR0 2 sin 0为车体离心力在水平方向产生的力矩L2 sin2 0 + J sin2 0 + J cos2 0是车体在XY平面绕Z轴旋转角加速度所需要的力矩转移到轮上的力矩。所
8、以在两个轮 上方向不相同。2m L + J 一 J sin0 cos0 (0 一0 ) D2-为使车体克服摆动造成的柯里奥利力力矩,而由轮子为车体提供力矩时,轮子收到的反 作用力造成的力矩。mR 20R. C .一.为让车体产生0 R的加速度所需要的力矩R,为让车体产生0 D的角加速度所需要的力矩 R (0-0 )R22 J LRR D 2为让车体产生绕半径转动的角加速度所需要的力矩六、控制矩阵令:K = p+ Cm L2 sin 2 0 + J sin 2 0 + J cos 2 0也 + mR 2 + J + 2 J R14 pyz D 2e R D 2K =4 - m L2 sin2 0
9、 + J sin2 0 + J cos2。匕- 2J 万-=m gL sin 0 +)sin 0 cos 0f (0 -0 ) ld RK = m LR。2 sin 942 pK = 2。L2 + J - J I sin 9 cos9 (9 一9 )专m LR cos9m LR cos9m L2 + J0 ptpx220 c100m LR cos 9p0KK一2 c12m LR cos 9p0KKL 221_此为非线性控制方程,可以用于matlab仿真yz则有控制矩阵:将其在小角度线性化以后,得到:L R D 299 -K -0+10109K - K10.L4 59K + KL01R45MLMRm L2 + J0pppx220100m LR cos9p0KK212m LR cos9p0KK221m LR cos 9m LR cos9i- -i99 00100001 199+1010-ML90000910M L. LR90000901RR(此文档部分内容来源于网络,如有侵权请告知删除,文档可自行编辑修改内容,供参考,感谢您的配合和支持)
- 温馨提示:
1: 本站所有资源如无特殊说明,都需要本地电脑安装OFFICE2007和PDF阅读器。图纸软件为CAD,CAXA,PROE,UG,SolidWorks等.压缩文件请下载最新的WinRAR软件解压。
2: 本站的文档不包含任何第三方提供的附件图纸等,如果需要附件,请联系上传者。文件的所有权益归上传用户所有。
3.本站RAR压缩包中若带图纸,网页内容里面会有图纸预览,若没有图纸预览就没有图纸。
4. 未经权益所有人同意不得将文件中的内容挪作商业或盈利用途。
5. 装配图网仅提供信息存储空间,仅对用户上传内容的表现方式做保护处理,对用户上传分享的文档内容本身不做任何修改或编辑,并不能对任何下载内容负责。
6. 下载文件中如有侵权或不适当内容,请与我们联系,我们立即纠正。
7. 本站不保证下载资源的准确性、安全性和完整性, 同时也不承担用户因使用这些下载资源对自己和他人造成任何形式的伤害或损失。
最新文档
- 新人版英语八年级下册Unit5总复习ppt课件
- 新人教部编版一年级语文上第五单元ppt课件(全套)
- 高鸿业经济学基础第十五章-总需求-总供给模型-授课-河北工大宋建林课件
- 新人教版高中数学《等差数列前n项和》课件
- 新人教部编版五年级语文上册第六单元测试卷课件
- 高鸿业微观经济学课件第4章生产论
- 高鸿业--微观经济学-第一章课件
- 新人教版部编本五年级下册语文13 人物描写一组 ppt课件
- 新人教版高中化学必修第一册——电解质的电离ppt课件
- 新人教版部编教材二年级下册第一单元3《贝的故事》优质课教学ppt课件
- 高风险作业培训讲义_002
- 新人教版语文三年级下册第五单元全套ppt课件部编版
- 新人教版英语八年级上册第二单元全部ppt课件
- 《走一步再走一步》重点课件
- 新人教版语文一年级上册:识字1《天地人》课件
