 过程控制考试题库终结版要点
过程控制考试题库终结版要点

《过程控制考试题库终结版要点》由会员分享,可在线阅读,更多相关《过程控制考试题库终结版要点(19页珍藏版)》请在装配图网上搜索。
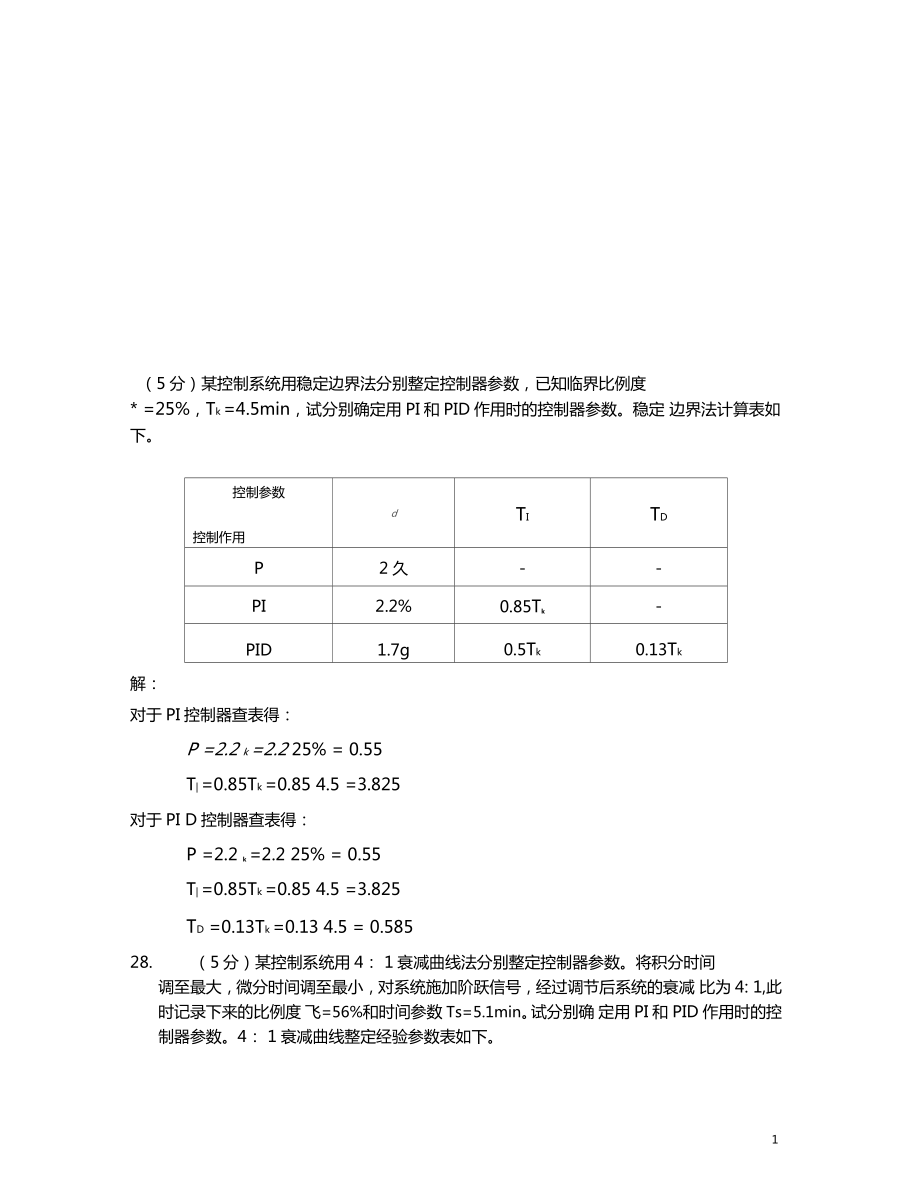
1、(5分)某控制系统用稳定边界法分别整定控制器参数,已知临界比例度* =25%,Tk =4.5min,试分别确定用PI和PID作用时的控制器参数。稳定 边界法计算表如下。控制参数控制作用dTiTdP2久-PI2.2%0.85Tk-PID1.7g0.5Tk0.13Tk解:对于PI控制器查表得:P =2.2 k =2.2 25% = 0.55T| =0.85Tk =0.85 4.5 =3.825对于PI D控制器查表得:P =2.2 k =2.2 25% = 0.55T| =0.85Tk =0.85 4.5 =3.825Td =0.13Tk =0.13 4.5 = 0.58528. (5分)某控制系
2、统用4: 1衰减曲线法分别整定控制器参数。将积分时间调至最大,微分时间调至最小,对系统施加阶跃信号,经过调节后系统的衰减 比为4: 1,此时记录下来的比例度 飞=56%和时间参数Ts=5.1min。试分别确 定用PI和PID作用时的控制器参数。4: 1衰减曲线整定经验参数表如下。、控制参数 控制作用 dTiTdp6s-pi1.2Q0. 5Ts-pid0.86s0.3Ts0.1Ts解:对于PI控制器查表得:P=1.2、s=1.2 56% =0.67Ti =0.5Tk =0.5 5.1 =2.55对于PI D控制器查表得:P = 0.8、:s =0.8 56% = 0.48TI -0.3Tk -0
3、.3 5.1 =1.53Td =0.1Ts =0.1 5.1 =0.5129. (10分)一个流量双闭环比值控制系统如题5.2图所示。其比值用DDZ-川型乘法器实现。已知 Q1max = 26500m3/h,Qzmax = 32000m3 / h。求:a)画出控制系统的结构图。b)当I0 =16mA时,比值控制系统的比值 K及比值系数K分别为多少。c)待比值系统稳定时,测得h =16mA,试计算此时的12为多大。IIIID为T11题5.2图流量双闭环比值控制系统原理图解:1)由于 Io = K 164得 K = lo -4 /16 =(16-4)/16 =0.75 所以K + Q2max2)由
4、仪表的比例系数定义,K*i75加9K2-4mAh4mA得:12 二 K(h -4mA) 4mA即:12 =0.9 (10-4) 4= 9.4mA 30. 一个比值流量控制系统用 DDZ-川型乘法器来进行比值运算,其原理图如题 3图所示。流量用孔板配差压变送器来测量,但没有开方器,已知 Qjmax = 3600 kg/h,Qzmax = 2000 kg/h。a) 试画出比值控制系统的结构图。b) 如果要求比值为Q1 :Q2:1,应如何设置乘法器的设定值I。(乘法器的输出|=(11一4)(1一4)4)16题3图单闭环乘法比值控制系统原理图解:流量的最大量程分别为 F1max = 3600kg/h,
5、F2ma2000kg / h。流量与检测电流的关系为,1广16F 4 ,12=16F 4,流量比值为K二旦,乘法器的输F1maxF2maxR出为 |、(|1一4)仏-4)*。16稳态时有 1“2,即:l(l4) (l4) 4,1164,16(11-4)l0 =16K 4。不加开方器情况,要进行非线性处理:F1maxF2max jFimaxF2max口 3600 (2 2000= 0.92= 0.81乘法器的设置值:l0=K非线性 16 4=0.81 16 4=16.96mA六、应用题(15)1. 为了获得被控对象的动态特性,常用的实验方法之一是给被控对象施加一个阶 跃扰动信号,观察其响应,从而
6、有观察到的信息分析其特性。但由于某些生产 过程的被控对象不允许长时间施加这样的干扰信号,所以人们采用矩形脉冲信 号取代阶跃扰动,获得观测数据,再将脉冲响应曲线转换成阶跃响应曲线,以 便于特性提取。题图6为一个矩形扰动脉冲X (宽度为t0,高度为A)施加到 被控对象上的响应曲线 y。用所学过的控制理论知识,将该脉冲响应曲线转换 成高度为A的阶跃信号响应曲线。要求分析转换机理,写出转换步骤。题6图矩形脉冲输入/输出曲线阶跃响应曲线答:设被控对象特性为线性特性,由叠加原理,输入一个矩形脉冲信号,相当于 施加两个阶跃信号,一个在t=0处,另一个在t=t0处。 设阶跃响应为y1,将所测绘的响应曲线按时间
7、间隔t0等分。在第一区间,yt0)= y1(t0)。在第二区间 y1(2t0)= y(2t0)+ y(t0)。第三区间,y1(3t)= y(3t)+ y1(2t)。以此 类推,将前一区间的阶跃响应曲线叠加到本区间的脉冲响应曲线上,即可得到本区 间的阶跃响应曲线。其响应曲线见下图。2. 为了获得被控对象的动态特性,常用的实验方法之一是给被控对象施加一个阶 跃扰动信号,观察其响应,从而有观察到的信息分析其特性。但由于某些生产 过程的被控对象不允许长时间施加这样的干扰信号,所以人们采用矩形脉冲信号取代阶跃扰动,获得观测数据,再将脉冲响应曲线转换成阶跃响应曲线,以 便于特性提取。题图6为一个矩形扰动脉
8、冲X (宽度为to,高度为A)施加到 被控对象上的响应曲线 y。用所学过的控制理论知识,将该脉冲响应曲线转换 成高度为A的阶跃信号响应曲线。要求分析转换机理,写出转换步骤。ol1!肚冲扰动愉入3. 在某一蒸汽加热器的控制系统中,用响应曲线法进行参数调整。当电动单元组 合控制器的输出从6mA改变到7mA时,温度记录仪的指针从85C升到87.8C,从原来的稳定状态达到新的稳定状态。仪表的刻度为50/00C,并测出纯滞后时间o=1.2min,时间常数To=2.5min。如采用PI和PID控制规律,试 确定出整定参数(响应曲线法控制器参数整定经验公式见附表)。解:输入增量为:厶X = 7 - 6 =
9、1mA输出增量为:丫 =87.8-85.0 = 2.8 C输入量程差为:X max - X min =10-0=10 mA 输出量程差为:Ymax - Ymin = 100 - 50 = 50 C所以,Y/(YmaIX-丫min )2.8/50X /(Xmax一 X min )1/10二 0.56由查表得:在选用PI控制器时,.K0e00.56 汉 1.2-=1.1100% =1.1100% =30%T。2.5TI =3.3 0 =3.3 1.2 =3.96 min在选择PID控制器时, 0.85100% =0.85 0.56 1.2 100% =23%T02.5Ti =2 o =2 1.2
10、=2.4 minTd =0.5.0 = 0.5 1.2=0.6min响应曲歩法控制器瞎散整定经验公式控制动件一一61TDPx 100%PIiJ X 冷H X 100強3r3TDPD0.85 N100Q-5rfl4. 用分度号为K的镍铬-镍硅热电偶测量温度,在没有采取冷端温度补偿的情况 下,显示仪表指示值为500C,而这时冷端温度为60C。试问:实际温度应为多少?答:如果热端温度不变,设法使冷端温度保持在20 r,此时显示仪表的指示值应为多少?棣钻-稼班趣巾肝分度表(行厘号;K.奏比瑞温厘为010203040506070090fe/mV*00.0000.370.7981.2031.61L2,02
11、22.4362.8503.2663,6811004.0954.50&4.9195.7139.7456J376.53氐删7.3387.7372008.137837A.03B9.34110J5110,5W10.96911.39111.79530012-20?J2-623B.039J3.45613.874U29214-7T2ISA3115.55215.97440016.39516.81817.24117.664I8.O8S18.51318-93819.36319.78820.21450020-&4021曲21,49321.91932.346g-1 yyi23.19$站.血24.05024.47660
12、024.90225.32725.75126.17626.39917.02227.44527.86?28.28&:S. =1970029J2B29.54729,96530.35330.7931-21431 上2932.04232.45532.S6680032.2773J.68654.095弭.50214.909IS.31435.71E36.12136,53436,92590037.32337.72438.12238,51938.91539.31039-70340.06+Q.4B84D.S97100041 .2541.657斗42.43242.81743.20243.5S543.96S-14.34
13、44.72F110045.1043.48643.86346.238445.61246.9S547.35647.72648-0954S.46212DQ胡.&茹49.132.55645.91$50.27650.63350.99051.54451-69752-D49130052.39852.74753.09353.43953.7S154.12584.46654.807*解:显示仪表指示值为500时,查表可得此时显示仪表的实际输入电势为20.64mV,由于这个电势是由热电偶产生的,即E(t, to) = 20.64mV同样,查表可得:E(t,0) =E(t,t)+E(t,0)-20.64 2.463
14、= 23.076mV由23.076mV查表可得:t=557C。即实际温度为 557C。当热端为557C,冷端为20C时,由于E (20,0) =0.798mV,故有:E(t,t)=E(t,O)-E(t0,O)=23.076 - 0.798 = 22.278mV由此电势,查表可得显示仪表指示值应为538.4 Co5. (12)某生产过程需要甲乙两种液体,甲液体的正常流量为1250m3/h,仪表量程为0-1350m3/h;乙的正常流量为150m3/h,仪表量程为0-240m3/h。如果选甲为 主变量,乙为副变量,设计一个控制乙的单闭环比值控制系统,画出流程图并计算 引入开方运算与不引入开方运算所分
15、别设置的比值系数。答:采用乘法器的单闭环比值控制流程框图如图所示(其中Qi为甲流量,Q2为乙流量) Q1fmax 1350m3/h: Qi 的量程上限, Q2max =150m3/h: Q2的量程上限, Qimin = 0m3 / h : Q1的量程下限, Q2min =0m / h : Q2的量程下限。Q2Q1 max _ Q1 min1引入开方器时,比值系数为:Ki f 2 f imax f iminQ1max _ Q1 minKQ1 Q2max Q2minQ2max _ Q2min150 1350 -00.675 1250 240 -02不引入开方器时:Q2 Q1 max _ Q1 mi
16、nKIQ1 Q2 max Q2min J(150 1350-0 1250 240-02二 0.675 = 0.4566. 设计一个比例、积分(PI)调节器,控制一个温度调节系统。控制器的调节范围 为:0-3000E,控制器的输出为 4-20mA。当给定被控对象一个如图(a)所示的阶跃 输入时,测定的被控对象响应曲线如图(b)所示(响应曲线法控制器参数整定经验公式见下表)。要求:计算出控制器的控制参数,画出控制系统方框图响应曲线法控制器参数整定经验公式表调节规律调节参数比例度%积分时间Ti微分时间TdP(K0 t/T0)X 100%PI1.1(K0t/T0)X 100%3.3t0.5 oPIDO
17、.85(Kot/To)X 100%2t答:由已知条件得:控制器的调节范围上下限为:ymax= 3000 C和ymin =0C,控制器的输入上下限为Pmax =20mA和Pmin =4 mA,由测试数据得,当输入信号从 4mA变化到18mA时,被控对象输出信号从 0C变化 到 2500 Co由此得广义被控对象的放大系数K0,/ymaxymin/RaxPmin 丿Ko(2500-0 /18-4 13000-0丿/ 120-4 丿2500 理 0.953000 14在测得的曲线上找拐点A,作切线交于B C点,如下图。图中的读数约为:tB 3min , tc 20min。所以,To = 20 - 3
18、= 17 min, o 二 3min。由表中查得 PI控制器的比例度计算公式为,K000.95汇 3、=1.1100%=1.1100%=18.48%To17Kc 、=1/0.1848 =19.11积分常数为:T| =3.3 =3.3X3 = 9.9min控制系统方框图见下图Pl控制器厂义被控对家广义被控对象PI控制器7.已知已被控对象的传递函数为W(s)二KeY(TiS 1)(T2S 1)在阶跃扰动r(t)变化(从r(t) = 12mA变化到r(t)=16mA)的作用下,其响应曲线 如下图所示。使用阶跃响应曲线确定被控对象的传递函数中的各参数,K。,.,T1和T2。二阶被控对象响应曲线上各特征
19、值关系曲线图见附图。答:曲线的起始点为B,在曲线中找到拐点P,过拐点作切线交于C、D /、Z0.65 O.3CI0.75188. 对于有自衡能力的二阶被控对象的传递函数为:W(s)=K。(Tis 1)(T2S 1)Ko,其单位阶跃响应曲线如下图。用图解法确定此二阶被控对象传递函数的参数Ti和T2。其中BE与m的相互关系表见附表。答:由于输入为单位阶跃输入,被控对象的放大系数为K。=13.5Ti和T2的确定步骤如下:1)过响应曲线的拐点A作切线;2)分别交B、C、D和E点,并求得CD和BE值;B =5.5,C = 5,D =9.5,E = 4.5CD =9.5 - 5=4.5,BE =5.5 -
20、 4.5 13)从附表中求得与BE值对应的m值。4)由 CD 二T2 -T1,m 二T1/T2解得5)9. 对于一个热交换系统设计一套前馈-反馈复合控制装置,系统的管道仪表流程K 图如图所示。已知被控对象和执行装置的传递函数近似为Wa (s)亠eaSTaS + 1 (其中,Ka =3,Ta =5min,5 =2.5min),反馈通道检测变送装置的传递函 数为Wm(s) Km (其中Km = 0.5),扰动通道的传递函数近似为K Wd(s)-edS (其中,Kd =0-5,Td =3min,= 3min )前馈通道检测TdS+1变送装置的传递函数为 Wq(s) = Kq (其中Kq=0.5 )。
21、试在反馈通道上设计一个 PID控制器Wc(s),在前馈通道上设计一个前馈控制器 Wf(s)。要求:设计控制 器,计算出各控制器的控制参数,并画出可实施的控制系统方框图。注:响应曲线法控制器参数整定经验公式见下表调节规律调节参数比例度%积分时间Ti微分时间TdP(K%/T。) X100%PI1.1(KL/T0)X 100%3.3%PID0.85(KJ0/T0) X100%200.5解:反馈通道主控制器的设计用响应曲线法设计反馈通道的 PID主控制器,系统被控对象的广义传递函 数可近似为KaKmKa - -asKaKm . .asK0- -0sW0(s) =Wa(s)Wm(s)e KmeeTas+
22、1Tas + 1T0s + 1其中 K0=KaKm=3 0.5 =1.5, T0=Ta 二5min ,0 = a = 2.5min由查表可得: 、 =O.85K0 0/T0 100% =0.85 1.5 2.5/ 5 100% =63.75%Kc -1/、 =1/0.675 =1.57T| = 2 0 = 2 25 = 5TD =0.5 2.5 =1.25PID控制器Wc(s)的方框图为:1.57|1 十丄+1.255前馈通道的前馈控制器设计由不变性条件Wf(s)Wa(s)WQ(s) Wd(s) =0得:Wf(s) Wd(s) Wa(s)WQ(s)二Kd TaS*1e_(羊卫)s0.5 51 e_(3-2.5)seeKaKQTds 13 0.53s 1 3 3s 1Wf(s)是一个具有超前性质和纯滞后的前馈补偿器。Kf=15J的物理实现方框图见下图,其中: Kf =0.33 , T, = 5, T2 =3 ,T2S 13 3s 1计算 k =卫 -1-1= 0.67T233e5s的物理实现就本系统来讲,f =0.5,远比T1,T2小,所以e5s可近似为一个惯性环节,即:e5s0.5s+1所以,前馈控制器Wf(s)的物理实现图见下图14
- 温馨提示:
1: 本站所有资源如无特殊说明,都需要本地电脑安装OFFICE2007和PDF阅读器。图纸软件为CAD,CAXA,PROE,UG,SolidWorks等.压缩文件请下载最新的WinRAR软件解压。
2: 本站的文档不包含任何第三方提供的附件图纸等,如果需要附件,请联系上传者。文件的所有权益归上传用户所有。
3.本站RAR压缩包中若带图纸,网页内容里面会有图纸预览,若没有图纸预览就没有图纸。
4. 未经权益所有人同意不得将文件中的内容挪作商业或盈利用途。
5. 装配图网仅提供信息存储空间,仅对用户上传内容的表现方式做保护处理,对用户上传分享的文档内容本身不做任何修改或编辑,并不能对任何下载内容负责。
6. 下载文件中如有侵权或不适当内容,请与我们联系,我们立即纠正。
7. 本站不保证下载资源的准确性、安全性和完整性, 同时也不承担用户因使用这些下载资源对自己和他人造成任何形式的伤害或损失。
