《机器人示教器急停按钮失灵报告》由会员分享,可在线阅读,更多相关《机器人示教器急停按钮失灵报告(7页珍藏版)》请在装配图网上搜索。
1、 NO.Doc-标题成都神钢机器人示教器急停按钮失灵报告副题双机器人系统外部急停输入信号线分开接线唐 山 松 下 产 业 机 器 有 限 公 司机器人系统部技术课批准确认作成【 】【 】【王超】 20121-02-28一、时间:2012年02月23日2012年02月27日二、地点:机器人系统部工厂内三、人员:王超四、仪器:万用表 五、设备:成都神钢ARM机器人焊接系统(YA-TY1775)六、背景: 成都神钢项目为双机器人单工位厚板系统,使用TAWERS机器人焊接,具体配置如下:焊接电源:全数字MIG/MAG弧焊电源 产品序列号:YD-ABD451HA6机器人控制箱:YD-ABD451HA6工
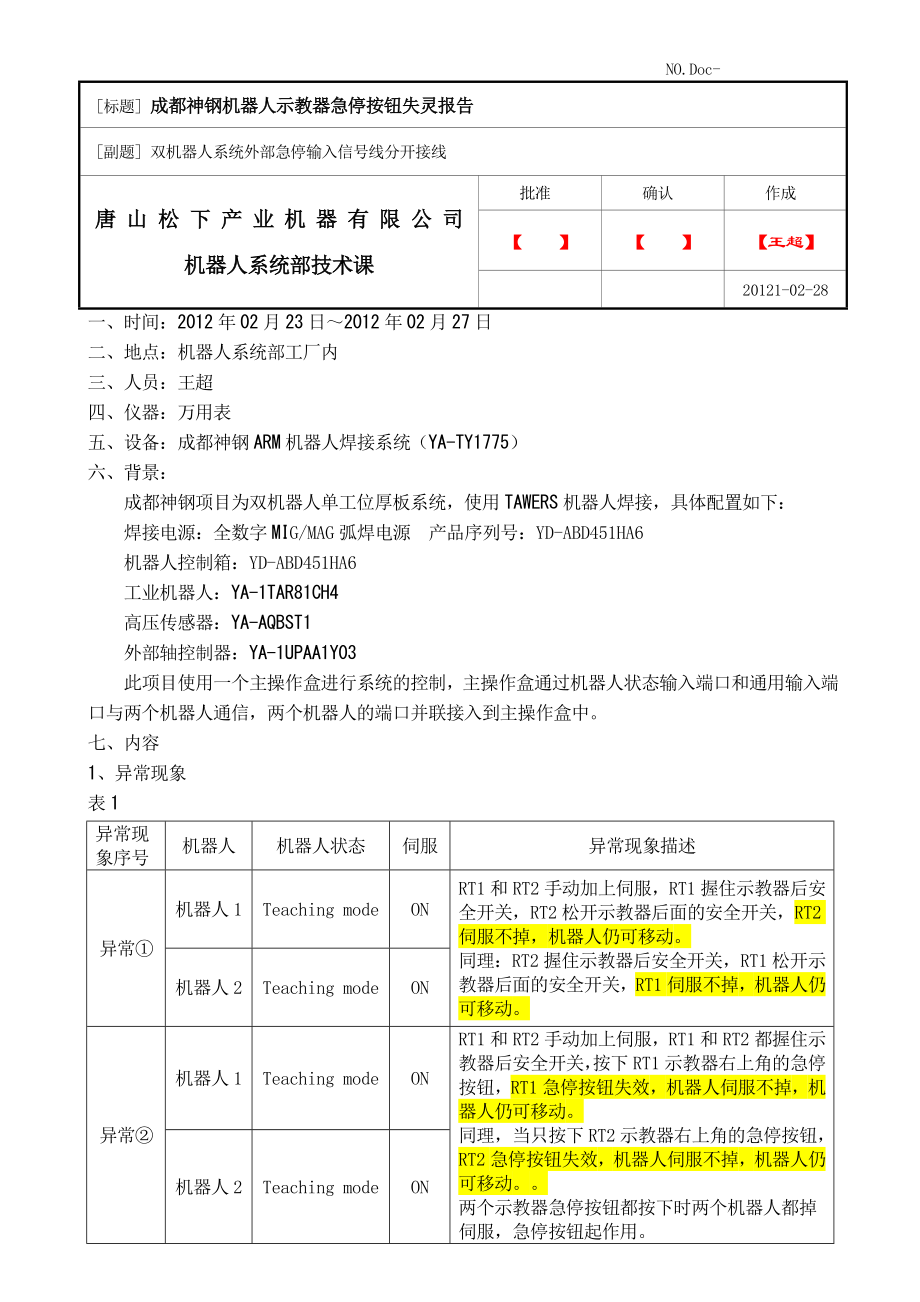
2、业机器人:YA-1TAR81CH4高压传感器:YA-AQBST1外部轴控制器:YA-1UPAA1Y03此项目使用一个主操作盒进行系统的控制,主操作盒通过机器人状态输入端口和通用输入端口与两个机器人通信,两个机器人的端口并联接入到主操作盒中。七、内容1、异常现象表1异常现象序号机器人机器人状态伺服异常现象描述异常机器人1Teaching modeONRT1和RT2手动加上伺服,RT1握住示教器后安全开关,RT2松开示教器后面的安全开关,RT2伺服不掉,机器人仍可移动。同理:RT2握住示教器后安全开关,RT1松开示教器后面的安全开关,RT1伺服不掉,机器人仍可移动。机器人2Teaching mod
3、eON异常机器人1Teaching modeONRT1和RT2手动加上伺服,RT1和RT2都握住示教器后安全开关,按下RT1示教器右上角的急停按钮,RT1急停按钮失效,机器人伺服不掉,机器人仍可移动。同理,当只按下RT2示教器右上角的急停按钮,RT2急停按钮失效,机器人伺服不掉,机器人仍可移动。两个示教器急停按钮都按下时两个机器人都掉伺服,急停按钮起作用。机器人2Teaching modeON异常机器人1Play modeONRT1和RT2都加上伺服,随意按下其中一个示教器右上角急停按钮,机器人伺服不掉,机器人仍可移动,急停按钮失效。机器人2Play modeON异常机器人1Play mode
4、ONRT1在运转模式,手动启动焊接,RT1焊接中。此时RT2示教器受到严重干扰,示教器画面在Play mode和Teaching mode下频繁切换,RT2示教器无法使用。同理RT2焊接时RT1的示教器也无法使用。机器人2Teaching modeOFF2、异常原因查找造成以上的异常现象推断为两个机器人间的互相干扰造成,因此首先查找两台机器人间是否存在互相通信。两台机器人间存在连线的点有:双机器人通信线,机器人通用输入输出口IN5、IN6、IN7和OUT5、OUT6、OUT7。通过主操连接在一起的线,机器人通用输入输出口IN9、IN10、IN12 、IN13、IN14、IN15、IN16、IN
5、17、IN18、IN19、IN20、IN21、IN22、IN23、IN24。状态输入口:SI6、SI7、SI8。门停止输入:DS1+、DS1-、DS2+、DS2-。外部急停输入:E1+、E1-、E2+、E2-。试验一将上述中的线号断开,异常现象仍然存在。试验二将上述中的线号都断开,异常现象仍然存在。试验三将上述中的线号都断开,异常现象仍然存在。试验四将上述中的线号都断开,异常现象仍然存在。试验五将上述中的线号都断开,E1+、E1-、E2+、E2-用单独的短路线短路,异常现象消失。试验六将上述中的线号都断开,E1+、E1-、E2+、E2-用单独的短路线短路,其他线正常连接,异常现象消失。电气设计
6、图纸如下:放大放大放大放大 3、结论两台机器人的外部急停输入E1+、E1-、E2+、E2-连接在一起两个机器人会互相影响,出现上面所述的异常现象。4、现场改造将外部急停输入E1+、E1-、E2+、E2-和门停止都使用继电器隔离开,异常现象消失。5、思考松下机器人的急停一共有两个,一个为示教器右上角的紧急停止按钮,另一个为机器人控制箱内机器人外部急停输入。理论上无论任何时候按下示教器右上角的紧急停止按钮时机器人都应该掉伺服,机器人停止移动。但当两台机器人的外部急停输入E1+、E1-、E2+、E2-连接在一起时却失效,因为此问题涉及到安全问题,烦请PWS尽快试验确认。6、后附图片焊接电源YD-ABD451HA6机器人控制箱YD-ABD451HA6工业机器人YA-1TAR81CH4高压传感器YA-AQBST1外部轴控制器YA-1UPAA1Y037、后附图纸以下图纸为没有改造前的图纸
 机器人示教器急停按钮失灵报告
机器人示教器急停按钮失灵报告