 3、气垫摆实验
3、气垫摆实验

《3、气垫摆实验》由会员分享,可在线阅读,更多相关《3、气垫摆实验(16页珍藏版)》请在装配图网上搜索。
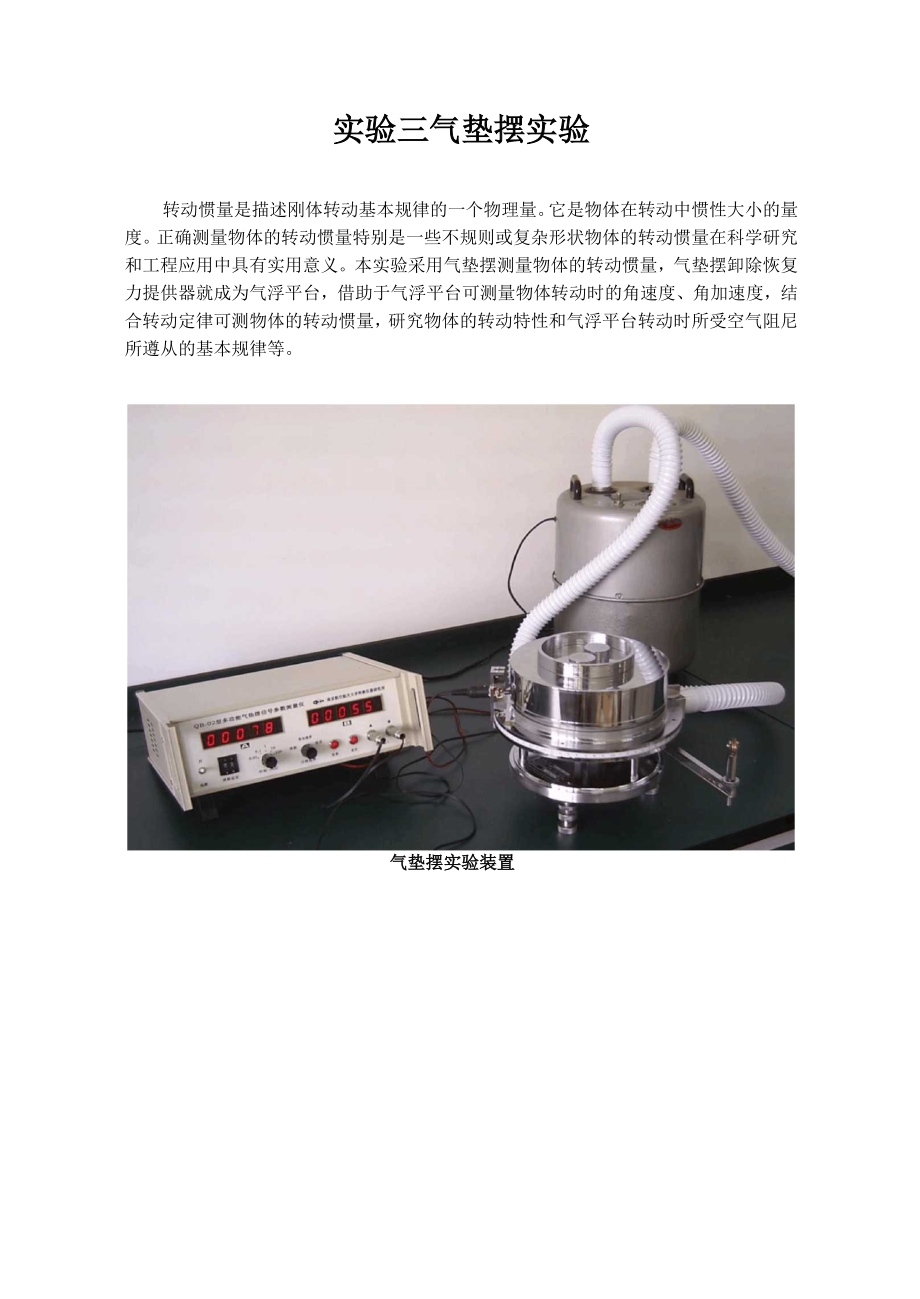
1、实验三气垫摆实验转动惯量是描述刚体转动基本规律的一个物理量。它是物体在转动中惯性大小的量度。正确测量物体的转动惯量特别是一些不规则或复杂形状物体的转动惯量在科学研究和工程应用中具有实用意义。本实验采用气垫摆测量物体的转动惯量,气垫摆卸除恢复力提供器就成为气浮平台,借助于气浮平台可测量物体转动时的角速度、角加速度,结合转动定律可测物体的转动惯量,研究物体的转动特性和气浮平台转动时所受空气阻尼所遵从的基本规律等。气垫摆实验装置用气垫摆测物体的转动惯量(必做实验)【实验目的】1. 了解用气垫摆测量转动惯量的原理。2. 学会气垫摆的调节和使用方法。3. 测量钢质圆环、圆柱的转动惯量。【实验仪器】气垫摆
2、、微音气源、气垫摆信号参数测量仪、电子天平、游标卡尺、测试样品(一个圆环,两个小圆柱)气垫摆由摆轮、平卷簧、气垫装置、被测物体定位设施和水平调节装置等部分组成,见图2。摆轮和平卷簧(图1)构成振动系统;气垫装置是一个开有许多小出气孔的气室,射出的气流可以消除摆轮和气室支承面之间的磨擦阻力矩;水平仪用于调节摆轮的水平状态,藉以保持在摆轮和气室支承面之间形成的薄气层的均匀性,使摆轮正常摆动。微音气泵输出的具有一定压力的气流通过进气管进入气室。进气量的大小可用阀门上的调节开关加以调节。摆轮工作台面上刻有直径不同的一些同心圆线。在测量物体的转动惯量时,可用这些定位线对置于摆轮上的被测物体进行定位。摆轮
3、挂线滑轮阀门调节手柄/光电门B彼测物体限位杆光电门A祛码进气管锁母调右螺钉气室弹簧挡光片固定螺钉角度盘水平仪图2气垫摆示意图图1平卷簧实验原理】在开启气源后,气垫装置通过其气室上的许多小孔射出的气流,托起摆轮,使摆轮在摆动过程中所受到的阻尼力矩降到最低程度。若将摆轮适当地转过一个角度后释放,则它就在平卷簧提供的恢复力矩的作用下作周期性摆动。气垫摆系统的摆动周期与摆轮或物体的转动惯量之间有确定的关系,利用这一关系可测量摆轮或物体的转动惯量。下面分析摆轮转动惯量与气垫摆摆动周期之间的关系。为明晰起见,可根据气垫摆摆动过程中能量的变化规律来研究这一关系。显然,当气垫摆摆轮摆到平衡位置和振幅位置之间的
4、任意位置时,它所具有的机械能为1)1E=J2+20式中J0是摆轮的转动惯量,为摆轮在这一位置时的角位移和角速度,D为平卷簧的刚度。若忽略摆轮和气室支承面之间的空气粘滞阻力矩,则气垫摆系统机械能守衡,即有12+D902=Ekm=Epm2)6)0其中E是摆轮在平衡位置时的最大动能,E是摆轮在振幅位置时平卷簧的最大kmpm弹性位能。上式对时间t求导,则得3)d9d29d9+D90dtdt2dt或d29Dd29+9=+w29=0(4)dt2J0dt20可见,这是一个谐振动方程,其解为9=9msin(w0t+0)(5)式中w是气垫摆摆动的圆频率,9是最大角位移(振幅),Q是振动初相位。0m摆轮的摆动周期
5、为w式中的平卷簧刚度D可用下式计算(推导过程见附录),即Ebh3D=12L其中b、h、L分别为平卷簧的宽度、厚度和长度。将该式代入(6)式,可得8)9)il2JLT=2兀00Ebh3上式可改写为Ebh3=T2048兀2L0这就是摆轮的转动惯量与气垫摆摆动周期之间的关系。当将被测物体置于摆轮工作台台面测其转动惯量J时,则得计算该物体转动惯量的公式为10)Ebh3(T2T2)48兀2L0式中T为物体与摆轮一起摆动时的振动周期。(10)式是测量物体转动惯量的基本公式。因在上式中平卷簧的弹性模量E、宽度b、厚度h、长度L都是设定的,故只要用气垫摆分别测出摆轮和被测物体与摆轮组合体的振动周期T和T,就可
6、用该0式计算出物体的转动惯量。当将两个形状和质量完全相同的圆柱体对称地置于摆轮工作台台面测其绕摆轮中心轴的转动惯量时,在测得这两个圆柱体与摆轮一起摆动的周期T后,仍可用(10)式计算它们的合转动惯量J,而每个圆柱体的转动惯量J应为ylJ-J(11)yl2在这种情况下,还可用转动惯量的平行轴定理来计算圆柱体的转动惯量,根据该定理,在理论上,圆柱体的转动惯量J应为ylJ=mx2+mr2(12)yl2其中m是圆柱体的质量,x为圆柱体中心轴与摆轮中心轴之间的距离,r为圆柱体的半径。上式右边的第二项为圆柱体绕其中心轴的转动惯量。在实验时,可将被测物体的转动惯量的测量结果与用上式计算得到的理论值作比较。【
7、实验内容】、测量规则物体-钢质圆环绕其中心轴的转动惯量1、将气垫摆信号参数测量仪的“测量选择”开关转到“周期”,“时标”开关转到1Oms挡。开启气垫摆信号参数测量仪电源开关,并作预热和复零。2、调节气垫摆水平松开锁母,转动调节螺钉,将水准仪气泡调到居中,使气垫摆处于水平状态,随后锁紧锁母。3、调节摆轮平衡位置开启气源的电源开关,使摆轮浮起,并使摆轮静止,注意这时摆轮上挡光片的位置,将光电门的红外发射管的进光孔对准挡光片的中心,即为平衡位置。4、调节摆轮限位杆位置将两个限位杆移动到适当位置,使摆轮上的挡光片,只能在约40度的范围内摆动。5、轻轻将摆轮转过一个适当的角度(约10),然后释放,使其摆
8、动,并用气垫摆信号参数测量仪测出摆轮摆动50个周期所需的时间t重复五次。算出摆轮摆动周期T0。6、将圆环置于摆轮工作台台面,用工作台面上的定位线将圆环定位,使圆环和摆轮同轴。令摆轮转过与其空载时大致相同的角度后释放,让其振动,用气垫摆信号参数测量仪测出圆环与摆轮组合体摆动50个周期所需的时间t,算出圆环与摆轮一起摆动的周期T。7、用公式(10)计算出圆环的转动惯量。8、用天平和游标卡尺测出圆环的几何尺寸和重量,算出圆环的理论转动惯量,并将圆环的实测转动惯量与其理论值作比较。二、测量钢质圆柱体绕摆轮中心轴的转动惯量,验证平行轴定理1、用游标卡尺测量个圆柱体的直径和高度,用电子天平测量它的质量。2
9、、将一个圆柱体置于摆轮工作台中心处,用与前面相同的方法测出一个圆柱体与摆轮一起振动50个周期所需的时间t,算出周期T,用式(10)计算圆柱体过对称轴的转动惯量,并与理论值作比较。3、将两个圆柱体对称地置于摆轮工作台台面上,使其与直径为120mm的定位圆线相切。4、用与前面相同的方法测出两圆柱体与摆轮一起振动50个周期所需的时间t,算出周期T,用式(10)和(11)计算圆柱体绕钢丝的转动惯量,并与用(12)式计算得到的理论值作比较。【实验数据记录与处理】1、圆环、小圆柱的几何尺寸及质量圆环夕卜径2R=mm,圆环内径2r=mm,圆环质量m=g小圆柱体夕卜径2R=mm,高度h=cm。2、记录实验数据
10、物体摆轮摆轮+圆环摆轮+小圆柱时可t测量次数、50T0(S)50T(S)50T(S)12345平均时间t(S)周期(S)3、数据处理计算被测物体的转动惯量kgm2)kgm2)一Ebh3=T2=048兀2l0Ebh3(T2-T2)=48兀2L0计算不确定度和百分差根据误差理论和(9)(10)式,可导得估算摆轮和被测物体转动惯量的不确定度的公式分别为A:AAAAA$=(-)2+(-旷)2+(3旷)2+(-)2+(2-才)2JEbhLT00AAAAA2TA2TAJ=(-E)2+(b)2+(3肝)2+(L)2+(T)2+(七)2JEbhLT2T2T2T200思考题】1.由于采用了气垫装置,这使得气垫摆
11、摆轮在摆动过程中所受到的空气粘滞阻尼力矩降低到最小程度,可以忽略不计。但如果考虑这种阻尼的存在,试问它对气垫摆的摆动(如频率等)有无影响?在摆轮摆动中,阻尼力矩变不变?2.试分析在测量中对转动惯量的测量精度影响最大的是哪些物理因素?13)附录:平卷簧刚度计算公式的推导如果在平卷簧上某一点A处取一段微小长度dL,如图2所示,设其力矩M作用前后的曲率半径分别为o和p,则有e0=EI(式中E是平卷簧材料的弹性模量,I是平卷簧截面的轴惯性矩。0如果用de0和de分别表示微小长度dL在外力矩作用前后对曲率中心所张的角度,则018)0dLdL平卷簧在外力矩M的作用下所产生的转角为=d(99)=)dLeEI
12、MLeEI14)bh3因矩形截面平卷簧的轴惯性矩为15)12其中b、h分别为平卷簧的宽度和厚度。将上式代入(14)式,可得Ebh3Ebh316)12L由于扭过角度申时平卷簧所产生的恢复力矩M。等于平卷簧上作用的外力矩M,即17)12L据此,可求得平卷簧的刚度为Ebh312L用转动定律法借助于气浮平台测物体转动惯量转动特性和空气阻尼特性(选做实验)【实验目的】1学习用气浮平台和转动定律法测物体转动惯量的原理2用气浮平台和转动定律法测物体的转动惯量、研究物体的转动特性3用气浮平台测量空气阻尼系数【实验仪器】气垫摆,气垫摆信号参数测量仪,电子天平,游标卡尺(精度0.05mm),圆环(一个),小圆柱体
13、(两个)等【实验原理】一、用转动定律法借助于气浮平台测转动惯量卸除气垫摆的平卷簧,将其变成一个气浮平台,它主要由气室、平台和加载装置三部分组成。当微音气泵向气室充气后,空气从气室周边和转动平台表面的小气孔内喷出,将转动平台浮起,基此,气浮平台与气室之间常规意义上的磨擦力被消除,转动平台得以持续转动。mg图1气浮平台如果考虑空气阻尼的影响,则气浮转动平台在绳子拉力力矩mt和空气阻尼力矩MZ的作用下,作加速转动。根据转动定理,可得转动气浮平台的转动方程为M=M+M=JB(1)TZ0其中J0,0分别为转动平台的转动惯量和角加速度。若考虑加载装置中绳与滑轮的磨擦影响,则绳的拉力矩求解如下:根据图1可列
14、出如下关系式:mg一T=ma(2)T=TT=T+fT=T(3)解(2)(3)得:4)故绳的拉力矩为:M=T-R=m(ga)fR(5)T式中m,a是砝码的质量和加速度,g是重力加速度,f是绳子与小滑轮之间的磨察力,R是转动平台上的绳子到转动平台中心的距离。实验表明,斯托克斯定律也适用于转动物体所受到的阻尼情况:当浮在空气上的转动平台的转速不太大时,阻尼力矩MZ近似地与角速度成正比,阻尼力矩方向与转动方向相反,阻尼力矩可写为:M=bw(6)Z式中b为阻尼系数,将(5)(6)代入(1)式,得Ln(ga)fRbw=JB(7)0考虑到线量与角量的关系,于是可求得气浮转动平台的转动惯量为:J=Im(ga)
15、fRbw/B(8)0同样实验亦可证明,在只有阻尼力矩作用的情况下,气浮转动平台以初角速度w转动后,其角位移0与角速度w为线性关系,如图2所示,即:0w=wK0(9)图2气浮平台在阻尼力矩作用下的运动规律式中的w为气浮转动平台在0=0时的初角速度,K为衰减常数,可从图线的斜0率求出。对(9)式求导,得:10)式中P为只有阻尼力矩作用时气浮转动平台的角加速度。故根据转动定律,这时阻尼力矩还可记为M=JP”(11)Z0将(10)代入得:M=-JKw(12)Z0比较(11)和(6)式,可知:b=J0K(13)代入(8),并经整理,则得:J=m(g-RP)R-fR(14)0P+Kw将被测物体置于气浮转动
16、平台上,在转动平台的砝码勾上加上同样质量的砝码,在与上述同样的测量条件下,使转动平台和被测物体一起作匀加速定轴转动通过同样的推导,可得到物体与气浮转动平台的合转动惯量为Jm(g-RP)R-fR15)这样,可计算得物体的转动惯量为JRm(g-RP)-fP+Kw16)式中Kw和Kw表示阻尼对测量转动惯量的影响,K恒为正值。上式是考虑了空气阻尼影响情况下定轴转动物体的转动惯量的计算公式。如果不考虑空气阻尼的影响,即令K=0,则(17)变为17)若对物体转动惯量的测量精度要求不太高,则可用上式计算转动惯量。二、物体转动特性研究由转动定律:M=Jp可知,在气浮转动平台上作用的力矩M保持不变的条件下,若增
17、加转动平台上物体的转动惯量J,则其角加速度卩要减少;反之,则卩增加。这就是物体的转动特性,这也反映了转动物体在启动时的基本特点,如图3所示。基于上述讨论,可得出物体转动特性的测量方法如下:即只要一一测出增加物体转动惯量后其角加速度的大小,并以转动惯量J为横坐标,角加速度卩为纵坐标,就可作出物体的转动特性曲线。图3物体的转动特性三、角速度和角加速度的光电计时测量法本实验用光电计时法并借助于气垫摆信号参数测量仪测量转动平台的角速度和角加速度。在砝码盘上加上砝码m后,转动平台从静止状态开始作加速转动。=A9/At18)2X2A/RR釜:第一光电门第一光电门图4气浮转动平台角速度和角加速度的测量当转动
18、平台上的挡光片通过角距离为9的两个光电门A和B时,则气垫摆信号参数测量仪可记录下挡光片穿过这两个光电门位置的时间Ati和At2以及通过两个光电门之间的时间t。设档光片两个爪之间的夹角为A9,则转动平台挡光片穿过光电门A、B的平均角速度为由于A9很小,故t,At很小,故可近似地认为转动平台在该时间内作匀加速转12动,因此,可把时间At,At内的平均角速度当作(1/2)At,(1/2)At这时刻的瞬1212时角速度,,而从w增大到w所需的时间为12121t=t一At211+At2219)因此气浮转动平台在时间t内的平均角加速度为20)AO/At-A0/At2AO(At-At)21=12t-(1/2
19、)At+(1/2)At(2t-At+At)AtAt121212挡光片从光电门A到光电门B之间的平均角速度为21)-Ow=t式(16)(17)中的w,卩和w,卩为一一对应的瞬时角速度和瞬时角加速度,这在实验中是难以精确测得的,但完全可用(20)、(21)式表示的平均角速度和平均角加速度代替,由此计算得到的物体转动惯量完全相同。【实验内容】:一、调节气浮转动平台与气垫摆信号参数测量仪1、开启微音气泵电源,松开转动平台制动螺钉,使转动平台能自由转动。2、调节转动平台进气阀门,改变进气量的大小,使挡光片处于光电门的中心位置,保证转动平台转动时不受阻。3、调节水平仪,使转动平台处于水平状态,使转动平台处
20、于最佳转动状态。4、将气垫摆信号参数测量仪“功能选择”置于“角加速度”档和“阻尼”挡,“时标”置于“0.01ms”挡,开启测量仪电源,使挡光片挡光后气垫摆信号参数测量仪能正常计时,该仪器的A、B两个窗口能正常显示读数。二、测量衰减常数K和阻尼系数b实验在转动平台空载条件下进行。1、将气垫摆信号测数测量仪“功能选择”置于“阻尼”挡,“时标”置于0.01ms挡,按“复位”按钮,使仪器复位清零。2、将光电门A(或B)置于转动平台光电门导轨的某一位置,如45,将其信号线插头插入气垫摆信号参数测量仪的A或B输入插孔。3、将挡光片置于起始位置(如0),用手拨动转动平台,使其在空气层上顺时针作减速转动,每转
21、一圈,顺次分别记下挡光片通过第一光电门的时间Ati,At2,At3,At4,At5,At6,At7,At8,计8次。对应的角位移0分别为0,2n,4n,6n,8n,10n,12n,14n,计算出相应的角速度,。12345678注意:转动平台每转一圈,光电门A就记一次时间,在该光电门作第二次计时前,应将气垫摆信号参数测量仪及时清零复位,以此类推。转盘初角速度不能太大,否则来不及记录数据。4、以0为横坐标、w为从坐标,作3-0图,通过求该图线斜率,确定衰减常数K其为K=匹A05、计算阻尼系数b。三、测物体的转动惯量1、将光电门A、B分别置于35和135。位置。将气垫摆信号参数测量仪“功能选择”置于
22、“角加速度”档,“时标”置于“0.01ms”挡,并按“复位按钮”,使仪器清零。2、将外径为120毫米内径110毫米的圆环置于转动平台上直径为120的定位线上(重合);将砝码盘系线勾勾在挡光片小孔中,并将砝码挂线绕在转台外圆上。在砝码盘上加入20克砝码。3、用手将转动平台挡光片置于起始位置(0),并释放之,使其在砝码的作用下,作匀加速转动,记下挡光片通过光电门A、B的时间At,At和两个光电门之12间的时间t,计5次。求和0。4、取下转动平台上的被测物体,不改变两个光电门的位置,在砝码盘中仍加入20克砝码,重新将挡光片置于起始位置(0),释放转台,使转动平台作匀加速转动,记下挡光片通过光电门A、
23、B的时间At,At和两个光电门之间的时间t,12计5次。求和0。5、用游标卡尺测出被测物体的内外直径;用物理天平秤出物体的质量m。6、将,0,w,0,K,R代入(16)式,计算被测物体的转动惯量,并用理论公式计算被测物体的理论转动惯量,将两者作比较。四、物体转动特性的测量1、光电门A、B的位置和气垫摆信号参数测量仪的状态同上,将气垫摆信号参数测量仪复位清零。2、将两个小圆柱体分别对称置于转动平台直径0、40、80、120、160mm处将气浮转动平台挡光片移到0位置,并释放转台,用气垫摆信号参数测量仪分别测出转动平台挡光片通过两个光电门位置的时间At,At和两个光电门之间的时间12t。算出物体的
24、转动惯量和相应的角速度和角加速度0。3、以J为横坐标,B为纵坐标,作出物体的转动特性曲线。【数据处理】一、测量衰减常数K和阻尼系数b挡光片挡光作用点到转动平台中心的距离R=mm档光片宽度B=mm挡光片张角AO=tag(B/R)=radO(rad)At(ms)w(rad/s)K=,b=二、测物体的转动惯量转动平台半径R=mm被测物体与物理量测量次数测件和转台组合体转台测件和转台组合体转台测件和转台组合体转台At(s)1At(s)2t(s)12345平均w=rad/s,p=rad/s2w=rad/sp=rad/sJ=kgm2三、物体转动特性研究转动平台半径R=mm被测物体与物理量物体和转台组合体转台物体和转台组合体转台物体和转台组合体转台物体At(s)At(s)t(s)位置(mm)1204080120160物体位置(mm)04080120160W(rad/s)1W(rad/s)20(rad/s2)J(kg/m2)思考题:1、当被测物体的质量增加时,气浮转动平台所受到的空气阻尼变不变?增加还是减小?为什么?在考虑了空气阻尼影响条件下测得的转动惯量数据,如当作无阻尼影响来处理时会造成多大的测量误差?试用你的实验数据作具体的分析。2、你能推导出气浮转动平台测转动惯量的不确定度计算公式吗?据你分析,对测量结果影响最大的是什么因素?
- 温馨提示:
1: 本站所有资源如无特殊说明,都需要本地电脑安装OFFICE2007和PDF阅读器。图纸软件为CAD,CAXA,PROE,UG,SolidWorks等.压缩文件请下载最新的WinRAR软件解压。
2: 本站的文档不包含任何第三方提供的附件图纸等,如果需要附件,请联系上传者。文件的所有权益归上传用户所有。
3.本站RAR压缩包中若带图纸,网页内容里面会有图纸预览,若没有图纸预览就没有图纸。
4. 未经权益所有人同意不得将文件中的内容挪作商业或盈利用途。
5. 装配图网仅提供信息存储空间,仅对用户上传内容的表现方式做保护处理,对用户上传分享的文档内容本身不做任何修改或编辑,并不能对任何下载内容负责。
6. 下载文件中如有侵权或不适当内容,请与我们联系,我们立即纠正。
7. 本站不保证下载资源的准确性、安全性和完整性, 同时也不承担用户因使用这些下载资源对自己和他人造成任何形式的伤害或损失。
