 建设项目工程力学答案
建设项目工程力学答案

《建设项目工程力学答案》由会员分享,可在线阅读,更多相关《建设项目工程力学答案(24页珍藏版)》请在装配图网上搜索。
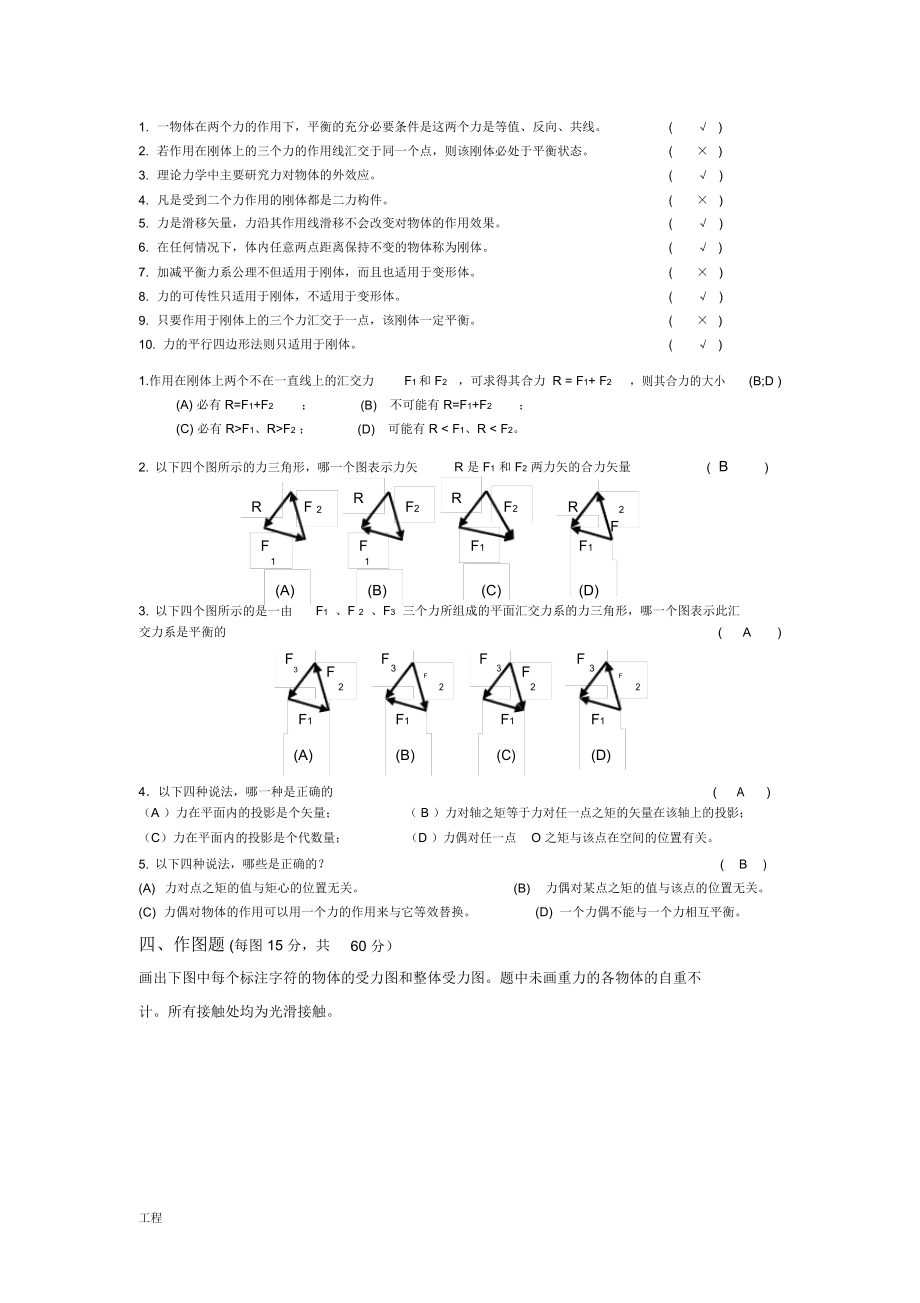
1、1.一物体在两个力的作用下,平衡的充分必要条件是这两个力是等值、反向、共线。()2.若作用在刚体上的三个力的作用线汇交于同一个点,则该刚体必处于平衡状态。()3.理论力学中主要研究力对物体的外效应。()4.凡是受到二个力作用的刚体都是二力构件。()5.力是滑移矢量,力沿其作用线滑移不会改变对物体的作用效果。()6.在任何情况下,体内任意两点距离保持不变的物体称为刚体。()7.加减平衡力系公理不但适用于刚体,而且也适用于变形体。()8.力的可传性只适用于刚体,不适用于变形体。()9.只要作用于刚体上的三个力汇交于一点,该刚体一定平衡。()10.力的平行四边形法则只适用于刚体。()1.作用在刚体上
2、两个不在一直线上的汇交力F1和 F2,可求得其合力 R = F1+ F2,则其合力的大小(B;D )(A) 必有 R=F1+F2;(B)不可能有 R=F1+F2;(C) 必有 RF1、RF2 ;(D)可能有 R F1、R F2。2.以下四个图所示的力三角形,哪一个图表示力矢R 是 F1 和 F2 两力矢的合力矢量(B)RF2RF2RF2R2FF1FF1F11(A)(B)(C)(D)3.以下四个图所示的是一由F1 、F 2 、F3 三个力所组成的平面汇交力系的力三角形,哪一个图表示此汇交力系是平衡的(A)FF3F3F33FFF22F22F1F1F1F1(A)(B)(C)(D)4以下四种说法,哪一
3、种是正确的(A)(A )力在平面内的投影是个矢量;( B )力对轴之矩等于力对任一点之矩的矢量在该轴上的投影;(C)力在平面内的投影是个代数量;(D )力偶对任一点O 之矩与该点在空间的位置有关。5.以下四种说法,哪些是正确的?(B)(A)力对点之矩的值与矩心的位置无关。(B)力偶对某点之矩的值与该点的位置无关。(C)力偶对物体的作用可以用一个力的作用来与它等效替换。(D) 一个力偶不能与一个力相互平衡。四、作图题 (每图 15 分,共60 分)画出下图中每个标注字符的物体的受力图和整体受力图。题中未画重力的各物体的自重不计。所有接触处均为光滑接触。工程工程1、无论平面汇交力系所含汇交力的数目
4、是多小,都可用力多边形法则求其合力。( )2、应用力多边形法则求合力时,若按不同顺序画各分力矢,最后所形成的力多边形形状将是不同的。( )3、应用力多边形法则求合力时,所得合矢量与几何相加时所取分矢量的次序有关。( )4、平面汇交力系用几何法合成时,所得合矢量与几何相加时所取分矢量的次序有关。( )5、若两个力在同一轴上的投影相等,则这两个力的大小必定相等。( )工程6、两个大小相等式、作用线不重合的反向平行力之间的距离称为力臂。( )7、力偶对物体作用的外效应也就是力偶使物体单纯产生转动。( )8、力偶中二力对其中作用面内任意一点的力矩之和等于此力偶的力偶矩。( )9、因力偶无合力,故不能用
5、一个力代替。( )10、力偶无合力的意思是说力偶的合力为零。( )11、力偶对物体 (包括对变形体) 的作用效果是与力偶在其作用面内的作用完全可以等效地替换。( )12、 对一平面内的两个力偶,只要这两个力偶中的二力大小相等或者力偶臂相等,转向一致,那么这两个力偶必然等效。 ( )13、平面力偶系合成的结果为一合力偶,此合力偶与各分力偶的代数和相等。( )14、一个力和一个力偶可以合成一个力,反之,一个力也可分解为一个力和一个力偶。( )15、力的平移定理只适用于刚体,而且也只能在同一个刚体上应用。( )16、平面任意力系向作用面内任一点 (简化中心) 简化后,所得到的作用于简化中心的那一个力
6、,一般说来不是原力系的合力。 ( )17、平面任意力系向作用内任一点简化的主矢,与原力系中所有各力的矢量和相等。( )18、平面任意力系向作用面内任一点简化,得到的主矩大小都与简化中心位置的选择有关。( )19、在平面力系中,无论是平面任意力系,还是平面汇交力系,其合力对作用面内任一点的矩,都等于力系中各力对同一点的矩的代数和。( )20、只要平面任意力系简化的结果主矩不为零,一定可以再化为一个合力( )。二 填空题。(每小题 2分,共 40分)1、在平面力系中, 若各力的作用线全部汇聚于一点 (交于一点),则称为平面汇交力系。2、平面汇交力系合成的结果是一个合力,这一个合力的作用线通过力系的
7、汇交点,而合力的大小和方向等于力系各力的矢量和。3、若平面汇交力系的力矢所构成的力多边形自行封闭,则表示该力系的合力 等于零。4、如果共面而不平行的三个力成平衡,则这三力必然要交于一点。5、力在平面的投影是矢 量,而力在坐标轴上的投影是代数量。6、合力在任一轴上的投影,等于各分力在相同 轴上投影的代数和, 这就是合力投影定理。7、当力与坐标轴垂直时,力在该坐标轴上的投影值为零 ;当力与坐标轴平行时,力在该坐标轴上的投影的代数 值等于力的大小。8、平面汇交力系的平衡方程是两个相互独立的方程,因此可以求解两个未知量。9、一对等值、反向、不共线的平行力所组成的力系称为力偶 _。10、力偶中二力所在的
8、平面称为_力的作用面。11、在力偶的作用面内, 力偶对物体的作用效果应取决于组成力偶的反向平行力的大小、力偶臂的大小及力偶的_方向 。12、力偶无合力,力偶不能与一个集中力 _等效,也不能用一个 _力 _来平衡 .13、多轴钻床在水平工件上钻孔时,工件水平面上受到的是平面力偶 _系的作用。14、作用于物体上并在同一平面内的许多力偶平衡的必要和充分条件是,各力偶的_力偶矩_代数和为零。15、作用于刚体上的力,可以平移到刚体上的任意点,但必须同时附加一力偶,此时力偶的_大小_等于 _原力 _对新的作用点的矩。16、一个力不能与一个力偶等效,但是一个力却可能与另一个跟它_大小相等 _的力加一个力偶等
9、效。工程1. 计 算 图 中 已 知 F1 , F2 , F3 三 个 力 分 别 在 x, y, z 轴 上 的 投 影 并 求 合 力 . 已 知F12kN , F21kN , F33kN .z解 :解: F1x2kN , F1 yF1 z0 ,F1F2x3F232 kNA32524505y4210OF2F3F2 y4F222 kN ,33252425452 kNxF2z3252F2422F3xF3 y0 , F3 z3kNFRxFix2.424kN , FRyFiy 0.566kN , FRzFiz3.707kN合力大小 FRFRx2FRy2FRz24.465kN合力方向rFRzcos(
10、FR , z)FRr, x)FRxrFRy0.127 ,cos(FRFR0.543 , cos(FR , y)FR0.8301. 如果平面力系是平衡的,那么该力系的各力在任意两正交轴上的代数和等于零。( )2. 如果平面力系是平衡的,那么该力系的各力对任一点之矩的代数和不等于零。( )3. 平面一般力系的平衡方程中二力矩形式的平衡方程表达式为M A(F) = 0,M B(F) = 0;Fx = 0。( )4. 如果一个平面力系是平衡的,那么力系中各力矢构成的力多边形自行封闭。( )5. 如果一个平面力系是平衡的,那么力系中各力矢的矢量和不等于零。( )6. 平面力偶系平衡的必要与充分条件是:力
11、偶系中各力偶矩的代数和等于零。( )7. 若一个物系是平衡的,则意味着组成物体系中每个组件都是平衡的。( )8. 对 于 有 n 个 物 体 组 成 的 系 统 , 若 系 统 是 静 定 的 , 则 最 多 可 列 出 3n 个 独 立 方 程 。 ( )9. 对于一个物体系统,若未知量的数目多于平衡方程的数目,则该系统是静不定的。工程( )10. 在理论力学研究范畴,静不定系统可以求出未知量的解,因为未知量的数目多于平衡方程的数目。( )二 填空题。(每小题 5分,共 50分)1. 平面一般力系平衡方程的基本形式为:2. 平面平衡力系中,二力矩形式平衡方程表达式为:3. 平面平衡力系中,三
12、力矩形式平衡方程表达式为:4. 平面汇交力系平衡方程表达式为:5. 平面平行力系平衡方程表达式为:6. 平面力偶系平衡方程表达式为:7. 空间力系的平衡方程表达式为:8. 空间汇交力系的平衡方程表达式为:9. 空间平行力系的平衡方程表达式为:10. 空间力偶系的平衡方程表达式为:四、计算题 (每图 20 分,共 40 分)1. 试求图示两外伸梁的约束力FRA、F RB,其中 FP = 10 kN ,F P1 = 20 kN ,q = 20 kN/m ,d = 0.8 m 。解: 1. 选择研究对象以解除约束后的ABC 梁为研究对象2. 根据约束性质分析约束力A 处为固定铰链,约束力为铅垂方向与
13、水平方向的分力Fay 和 FAx ;B 处为辊轴支座,为铅垂方向的约束力,指向是未知的,可以假设为向上的FB。3. 应用平衡方程确定未知力MA(F)0qd dFPdFB2dFP1 3d02FB = 21 kN ()MB(F) 05dFP dFRA2dFP1d 0; FA y 15 kNqd2Fx0 ,FAx0工程2. 结构上作用载荷分布如图, q13 kN/m , q2 0.5 kN/m ,力偶矩 M 2 kN m,试求固定端 A 与支座 B 的约束力和铰链 C 的内力。解:先研究BC 部分,画受力图。简化成合力Fq q2 2。列方程如下:M C F0,FNB2Mq22 10FNBq22M0.
14、5 kN2Fy 0,FCyFNBq22 0FCy2q2FNB1.5 kNFx0,FCx0再取 AC 部分画受力图,列方程M A F 0, FCx4 q2 1 1q1 3 1 1 M A FCy 1 022M Aq211FCy 1 6.25 kN m2q1 32Fy0,FAyFCyq2 1 0FAyFCyq212kNFx0, FAxq1 3 10 FCx 02FAxq3 14.5 kN21.所有杆件的轴线都在同一平面内的桁架,称为平面桁架。2.桁架杆件内力计算的几种常用方法有节点法和 截面法 。其中节点法适用于求解全部杆件内力的情况,而截面法 适用于求桁架中某些指定杆件的内力。3.平面一般力系只
15、有3个独立平衡方程,所以一般说来,被截杆件应不超出3个。4.若桁架杆件数为 m,节点数目为 n,那么满足桁架静定的必要条件是2n=3m+1。5.在临界平衡状态时,静摩擦力达到最大值,称为最大静摩擦力。静滑动摩擦力的大0 FFmax。小满足下列条件:6. 当物体所受主动力的合力 Q的作用线位于摩擦锥以内时,无论主动力Q的大小增至多大,当物体恒处于平衡状态时,这种现象称为自锁。自锁条件为0m。7. 当物体达到一种欲滚而未滚动的临界平衡状态时,其静滚阻力偶称为最大静滚阻力偶 。0M f M f max静滚阻力偶应满足下述条件 :。工程8. 最大静滚阻力偶与接触物体之间的法向反力成正比,方向与滚动趋势
16、相反, 此式称为滚动摩擦定律,即FN。M f max1. 两个相互接触的物体产生相对运动或具有相对运动的趋势时,彼此在接触部位会产生一种阻碍对方相对运动的作用。这种现象称为摩擦,这种阻碍作用,称为摩擦阻力。()2. 阻碍彼此间沿接触面公切线方向的滑动或滑动趋势的作用的摩擦,称为滑动摩擦,相应的摩擦阻力称为滑动摩擦力,简称摩擦力。()3. 当一个集中力作用在物体上,而物体仍处于静止平衡状态时,阻碍物体运动的力就称为静滑动摩擦力,简称静摩擦力。()4.库仑静摩擦定律:最大静摩擦力的大小与接触物体之间的正压力成正比,即Fmax fF N比 例 系 数 f是量纲为 1的量,称为静滑动摩擦因数。()5.
17、 法向反力 FN 与静摩擦力F 合成为一全约束力F R,简称全反力。全反力F R 与接触面法线的夹角达到的最大值,称之为两接触物体的摩擦角。()6. 通过全反力作用点在不同的方向作出在极限摩擦情况下的全反力的作用线,则这些直线将形成一个锥面,称为摩擦锥。()7. 两接触物体之间存在相对滑动时,其接触面上产生阻碍对方滑动的阻力称为动滑动摩擦力,简称动摩擦力。()8. 库仑动摩擦定律:动摩擦力的方向与物体接触部位相对滑动的方向相反,大小与接触面之间的正压力成正比。()9. 阻碍两物体在接触部位相对滚动或相对滚动趋势的作用的摩擦称为滚动摩擦,相应的摩擦阻力实际上是一种力偶,称之为滚动摩擦阻力偶,简称
18、滚阻力偶。()对,接触面之间产生的这种阻碍滚动趋势的阻力偶称为静滚动摩擦阻力偶,简称静滚阻偶。二、计算题1. 一屋架的尺寸及载荷如图所示,求每根杆件的内力。解:解:首先求支座A、H 的约束力,由整体受力图(a) ,Fx0,FAx0工程列平衡方程ME(F)0,FAyFNHFy 0,FAxFNH40 0FAyFNH 20 (kN)选取 A 节点画受力图,列平衡方程Fx0, F1 cosF20Fy0, F1 sin205 0F1= 33.5 kN ( 压 ), F 2=30 kN ( 拉 )选取 B 节点画受力图,列平衡方程Fx0, F6F20Fy0, F30F= 30 kN ( 拉 ), F =
19、0(零杆 )63选取 C 节点画受力图,列平衡方程Fx0 :F1 cosF4 cosF5 cos0Fy0 :F1 sinF5 sinF4 sin10 0F4= 22.4 kN ( 拉 ), F5= 11.2 kN ( 压 )选取 D 节点画受力图,列平衡方程Fx0,F8 cos F4 cos0Fy0,F7 F8 sinF4 sin 10 0F8= 22.4 kN ( 压 ), F 7= 10 kN ( 拉 )1.用矢径形式表示的点的运动方程为:rr t。2.用笛卡 儿 坐标 法xx tf1t ,yy t f 2t ,z方z t程f3 t表 示 的点的 运 动为:。3.弧坐标形式(自然法)表示的
20、点的运动方程为:ss tft。4. 点的速度是个 矢量 ,它反映点的运动的 快慢 和方向 ;点的加速度是个 矢量 ,它反映 速度大小 和方向 随时间的变化率。5. 切向加速度 a只反映速度 大小随时间的变化 ,法向加速度 an只反映 速度方向随时间的变工程化。6. 刚体的 平行移动 和定轴转动 称为刚体的基本运动,是刚体运动的最简单形态,刚体的复杂运动均可分解成若干 基本运动 的合成。7. 刚体平动的特点是:刚体上各点的轨迹形状 、速度 及加速度 相同。因此,只要求得刚体上任一点的运动,就可得知其他各点的运动,从而确定整体运动。二、判断题1. 三种方法描述同一点的运动,其结果应该是一样的。如果
21、将矢径法中的矢量r、v、a 用解析式表示,就是坐标法;矢量v、 a 在自然轴上的投影,就得出自然法中的速度与加速度。( )2.笛卡儿坐标系与自然轴系都是三轴相互垂直的坐标系。笛卡儿坐标系是固定在参考体上,可用来确定每一瞬时动点的位置。( )3.自然轴系是随动点一起运动的直角轴系(切向轴、法向轴 n 及副法向轴 b),因此,不能用自然轴系确定动点的位置。自然法以已知轨迹为前提,用弧坐标来建立点的运动方程,以确定动点每一瞬时在轨迹上的位置。( )4. 用笛卡儿坐标法求速度和加速度是将三个坐标分别对时间取一阶和二阶导数,得到速度和加速度在三轴上的投影,然后再求它的大小和方向。( )5. 用自然法求速
22、度,则将弧坐标对时间取一阶导数,就得到速度的大小和方向。( )6. 自然法中的加速度,物理概念清楚,切向加速度和法向加速度分别反映了速度大小和速度方向改变的快慢程度。()7. 几种特殊运动 (: 1)直线运动(, 2)圆周运动,(3)匀速运动a0;( 4)匀变速运动。( )三、计算题 (20 分)1. 图为减速器,轴为主动轴,与电动机相联。已知电动机转速n 1450 rpm ,各齿轮的齿数 z1 14, z2 42, z3 20, z4 36。求减速器的总传动比i14 及轴的转速。工程解: 各齿轮作定轴转动,为定轴轮系的传动问题轴与的传动比为:n1z2i12z1n2轴与的传动比为:n2z4i2
23、3z3n3从轴至轴的总传动比为 : i13n1n1n2z2z4i12i 23 ;n3n2n3z1z3i13n142365.4n3n11450n31420i12268.5 rpm5.4轴的转向如图所示。2. 平行四连杆机构在图示平面内运动。O1A = O2B= 0.2 m, AM = 0.6m , O1O2 = AB =0.6m ,如 O1A 按=15 t 的规律转动,其中以 rad 计,t 以 s 计。试求 t=0.8 s 时,M 点的速度与加速度。解: A 点作圆周运动,其运动方程:s O1 A3tv Ads( m/s)3dvdtaA0dt22aAnvA92O1 A0.245此时 AB 杆正
24、好第六次回到起始的水平位置O 点处。1. 动点的绝对速度等于它的牵连速度 与相对速度的 矢量和 ,即v av ev r ,这就是点的速度合成定理。工程2. 当牵连运动为平移时,动点的绝对加速度等于牵连加速度与 相对加速度的矢量和,即 aa ae ar 。3.当牵连运动为转动时,动点的绝对加速度等于牵连加速度、 相对加速度、与 科氏加速度 的矢量和,这就是牵连运动为转动时点的加速度合成定理,即aa aearaC,其中aC 2 vr 。二、计算题。1. 急回机构中, 曲柄 OA 的一端与滑块 A 用铰链连接。 当曲柄 OA 以匀角速度绕定轴 O转动时,滑块在摇杆上滑动,并带动摇杆绕固定轴O1 来回
25、摆动。设曲柄长OA=r ,两轴间距离 OO1l ,求曲柄在水平位置瞬时,摇杆O1B 绕 O1 轴的角速度1及滑块 A 相对摇杆 O 1B 的相对速度。解: 该机构在运动过程中,滑块A 相对于摇杆 O1B 的相对运动轨迹为已知。? 动点:滑块 A? 动系:与摇杆 O1B 固连? 绝对运动:圆周运动? 相对运动:滑块沿滑槽的直线运动牵连运动:摇杆绕O1 轴的转动将速度合成定理的矢量方程分别向x , y 轴上投影;将速度合成定理的矢量方程分别向x , y轴上投影,va sinve 0, va cos0vrsinOAr, cosOO1lrO1 Al 2r 2O1 Al 2, var 2ver 2,vr
26、rlr 2l2r 2l2又因为ve O1 A1l 2r 21摇杆此瞬时的角速度为1r 2其转向为逆时针。2r 2l2. 已知v= v =常量,当 t = 0 时,= 0;求AB4 时,点 C 速度的大小。解:解取 AB 杆的 A 点为动点,杆 OC 为动系,则va = ve + vr速度平行四边形如图所示;得工程veva cosvcosvCOCa cosveOAl解出 vCa cos2vlav当时,vC42l3. 图示铰接四边形机构中,O1A= O 2B= 10 cm,又 O1O2 =AB,并且杆 O1A 以等角速度=2rad/s 绕 O1 轴转动。杆AB 上有一套筒C,此筒与杆CD 相铰接。
27、机构的各部件都在同一铅直面内。求当= 60 时, CD 的速度和加速度。解: 取 CD 杆上的点C 为动点, AB 杆为动系,对动点作速度分析和角速度分析,如图(a)、 (b) 所示,图中:va = ve + vr ,ve = vAaa = ae + ar ,ae = aA式中:解出杆 CD 的速度、加速度为vvAcos0.1 m/saaaAsin0.3464 m/s2a1.刚体作平面运动的充要条件是:刚体在运动过程中,其上任何一点到某固定平面的距离始终保持不变。xOf1 (t)yOf2 (t )2.刚体的平面运动可以简化成平面图形在平面上的运动。运动方程为:f3 (t ),其中基点 O的坐标
28、 xO都是时间 t 的单值连续函数。如果以O为原、yO 和角坐标点建立平动动系Oxy ,则平面运动分解为跟随基点(动系)的平动 和相对于基点(动系)的转动。3.研究平面运动的基本方法包括分析法和运动分解法。4.平面运动刚体上点的速度分析的三种方法基点法 、速度投影定理和瞬心法。5.平面运动刚体上点的加速度的分析方法只推荐用基点法 。工程1. 基点法是求解平面运动图形上各点速度与加速度的基本方法,若已知平面图形上基点的速度与加速度, 以及平面图形的角速度与角加速度,则平面图形上各点的速度与加速度均可求得。( )2. 若已知平面图形上一点的速度 (大小、方向 )及另一点速度的方位, 则可应用速度投
29、影定理求得该点速度的大小。( )3. 瞬心法是求解平面运动图形上各点速度较为简捷的方法,关键是将该瞬时的速度瞬心确定后, 再将角速度求出, 则各点速度可按 “定轴转动 ”分布情况求得, 要注意速度瞬心是对一个平面运动刚体而言的。( )4. 速度瞬心并不等于加速度瞬心。( )5. 平面运动图形按基点法分解时,引进的动系是平动坐标系,且注意到绕基点的相对转动部分与基点的选择无关,因而平面图形的角速度和角加速度实际上是绝对的且是唯一的。6.选择不同的基点,平面图形随同基点平移的速度和加速度不相同。( )7.相对基点转动的角速度、角加速度与基点的选择无关。( )8. 今后标注平面图形的角速度和角加速度
30、时,只需注明它是哪个刚体的,不必注明它是相对于哪个基点。( )1. 曲柄连杆机构中,曲柄OA 长 r ,连杆 AB 长 l,曲柄以匀角速度转动,当OA与水平线的夹角= 45时, OA正好与AB垂直。求:1. 滑块的速度Vb。2. 连杆AB的角速度AB。3. 连杆 AB 中点 C 的速度。解: 1. 择基点: A(速度已知 )vA =r2. 建立平移系 A xy3. 将滑块沿铅垂方向的运动 (绝对运动 )分解为:跟随基点的平移牵连运动;以 A 点为圆心 AB 为半径的圆周运动相对运动。4.应用速度合成定理vvA+vB=BA由平行四边形,得到滑块的速度:vBvAr 0coscosvABAB工程l连
31、杆的瞬时角速度vA tanr 0tanll再求连杆 AB 中点 C 的速度 vC仍选 A 为基点 v Cv Av CA25 rvCvA2vCA2r2r22vAtan2vCA2. 一偏心圆盘凸轮机构如图示。圆盘C 的半径为R,偏心距为e。设凸轮以匀角速度绕O 轴转动,求导板AB 的速度和加速度。解: 如图建立坐标系则圆盘C 沿 y 向的运动方程为yC esin而导板的运动与圆盘Cy 向运动相同,所以导板运动方程为:yesinesintRvAByecostaABvABe 2 sintvABecos , aABe2 sin1. 任何物体都具有惯性,而力是引起物体运动的原因。()2. 质点受力作用时将
32、产生加速度,加速度的方向与作用力方向相同,其大小则与力的大小成正比,与质点的质量成反比。()3. 质量是质点惯性大小的度量;物体机械运动状态的改变,不仅决定于作用于物体上的力,同时也与物体的惯性有关。()4. 两物体间相互作用力的关系,仅对物体处于平衡状态时适用,对做复杂运动的物体不适用。()5.在国际单位制 (SI)中,长度、质量、时间、力为基本量,对应的基本单位是米(m)、千克(kg) 、秒 (s)、千克力 (kgf) 。()6.在国际单位制中,长度、质量、时间是基本量,它们的量纲分别用L、 M 、 T表示。加速度、力是导出量,它们的量纲分别是a L T-2、 F M L T-2 。()7
33、.任何一个力学方程,它的等号两侧的量纲应该是相同的。()8.在刚体对众多平行轴的转动惯量之中,通过质心的轴的转动惯量最小。()工程9.在动力学问题中,约束力的分析与静力学一样,仅与主动力有关。()10.在刚体对众多平行轴的转动惯量之中,通过质心的轴的转动惯量最小。()1.刚体对于任一轴的转动惯量,等于刚体对于通过质心 、并与该轴平行的 轴的转动惯量,加上 刚体的质量与此两轴间距离平方的乘积,即I z I zC Ml 2。2. 牛顿定律仅适用于 惯性参考系 ,所以,在应用牛顿定律时,可以选择日心参考系、地心参考系和地球参考系(地面参考系) 。3. 牛顿第二定律,将加速度写成矢径对时间的二阶导数,
34、则矢径形式的质点的运动微分方程为d2 rFmdt 2d2 xd 2 yd 2 zmFxmF yFzdt 2dt2m24.直角坐标形式的质点运动微分方程为:dt5. 在非惯性坐标系 O x y z 中,质点的相对运动基本方程为。其中,为mar F Qe QkQemae牵连惯性力, Qkmak为科氏惯性力, 它描述了质点的相对运动规律。n26.I zmi ri根据转动惯量的定义,刚体对转轴z 的转动惯量 Iz 为i 1,其中 ri 表示质点到z 轴的距离。I zr 2 dm8.若刚体的质量是连续分布的,则刚体转动惯量可表示为M。9.设刚体的总质量为M,则刚体对于z 轴的转动惯量也可以表示为I zM
35、 z2,其中 z称为刚体对于z 轴的 回转半径或惯性半径 。它的大小为zI z / M 。n10. 若质点系的质量用mR表示,则质点系的质量中心表达式为,mRmi。i 111.若质点系的质量中心(简称质心)的矢径用rC 表示,则质点系的质量中心表达式为,nmi rii 1rCM 。12. 若在直角坐标 Oxyz 轴上投影,则质心 C 的坐标公式为:mixiyCmi yizCmi zixCMM 。M2. 钟摆简化模型如图所示。已知均质细杆和均质圆盘的质量分别为M1 和 M2 ,杆长为 l ,圆盘直径为 d,求摆对于通过悬挂点O 的水平轴的转动惯量。工程解: 摆对于水平轴的转动惯量即细长杆的转动惯
36、量和圆盘的转动惯量应用平行轴定理,有I OI O杆I O 盘l2ll 21;IO杆22IO 杆I C1杆M 1212 M 1lM143M1l21d22I O盘I C盘M 2ldI O 盘M 2M 2d222l2I O1 M 1l 2M 23 d 2l 2ld38第 九章动能定理(作业)学号:姓名:得分 :一 填空题。(每小题 2分,共 40分)WF drWF cosds1.在一无限小位移中力所做的功称为力的元功,即或W Fx dx Fy dy Fzdz,其直角坐标形式为2.力在有限路程M1M2上的功。M2sW12F drF cos dsM10为力在此路程上元功的定积分,T1mv2即。23. 质
37、点系系内所有的质点在某瞬时的动能的算术和称为该瞬时质点系的动能,即。T1 mvC224.平动刚体的动能表达式为1 I z。5.定轴转动刚体的动能表达式为T22。1 MvC21 I CT12T2I I226.平面运动刚体的动能的表达式为2或。n7.动能定理的微分形式为dTi 1Wi,即在质系无限小位移中质系动能的微分等于作用在质系上所有力的元功之和。8.动能定理的积分形式为T2 T1W1,2,即在有限路程中质系动能的改变量等于在该路程上的有限功之和。工程9. 质点在空间任意位置都受到一个大小、方向均为确定的力的作用,该空间称为力场。10. 若质点系在运动过程中只受有势力作用,则其机械能保持不变,
38、称为机械能守恒定律,即T1V1T2V2E。11. 质系在某瞬时的动能与势能的代数和称为机械能。二、判断题。1.势力的功仅与质点起点与终点位置有关,而与质点运动的路径无关。()2.动能定理给出了质点系在运动过程中速度与位置的关系。()3.由于动能定理是标量式,故只有一个方程,因此,只能求解一个未知量。()4. 在动能定理中,力一般按主动力和约束力分类,在理想约束的情况下,约束力的元功之和为零。()5. 机械能守恒定律的解题步骤与动能定理基本相同,但必须注意势能的大小与零势面的位置有关;在同一系统中的不同势能可取不同的零势面。()三、计算题。1. 已知三个带孔圆板的质量均为m1,两个重物的质量均为 m2,系统由静止开始运动, 当右方重物和圆板
- 温馨提示:
1: 本站所有资源如无特殊说明,都需要本地电脑安装OFFICE2007和PDF阅读器。图纸软件为CAD,CAXA,PROE,UG,SolidWorks等.压缩文件请下载最新的WinRAR软件解压。
2: 本站的文档不包含任何第三方提供的附件图纸等,如果需要附件,请联系上传者。文件的所有权益归上传用户所有。
3.本站RAR压缩包中若带图纸,网页内容里面会有图纸预览,若没有图纸预览就没有图纸。
4. 未经权益所有人同意不得将文件中的内容挪作商业或盈利用途。
5. 装配图网仅提供信息存储空间,仅对用户上传内容的表现方式做保护处理,对用户上传分享的文档内容本身不做任何修改或编辑,并不能对任何下载内容负责。
6. 下载文件中如有侵权或不适当内容,请与我们联系,我们立即纠正。
7. 本站不保证下载资源的准确性、安全性和完整性, 同时也不承担用户因使用这些下载资源对自己和他人造成任何形式的伤害或损失。
