 模糊控制器的设计
模糊控制器的设计

《模糊控制器的设计》由会员分享,可在线阅读,更多相关《模糊控制器的设计(11页珍藏版)》请在装配图网上搜索。
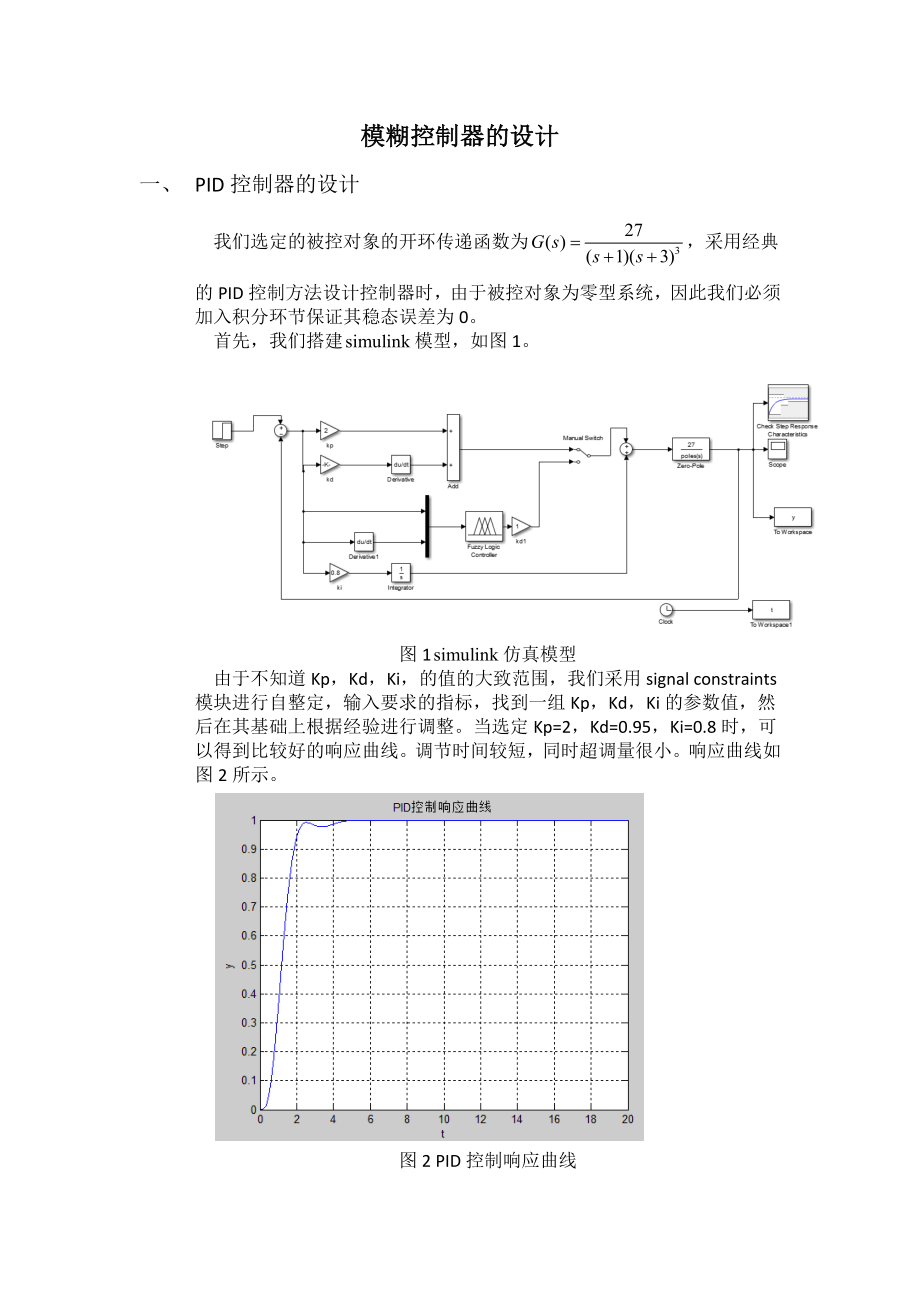
1、模糊控制器的设计一、 PID控制器的设计我们选定的被控对象的开环传递函数为,采用经典的PID控制方法设计控制器时,由于被控对象为零型系统,因此我们必须加入积分环节保证其稳态误差为0。 首先,我们搭建模型,如图1。 图1仿真模型由于不知道Kp,Kd,Ki,的值的大致范围,我们采用signal constraints模块进行自整定,输入要求的指标,找到一组Kp,Kd,Ki的参数值,然后在其基础上根据经验进行调整。当选定Kp=2,Kd=0.95,Ki=0.8时,可以得到比较好的响应曲线。调节时间较短,同时超调量很小。响应曲线如图2所示。图2 PID控制响应曲线将数据输出到工作空间,调节时间=2.04
2、s,超调量。可以看出,PID控制器的调节作用已经相当好。二、 模糊控制器的设计1、模糊控制器的结构为:图3 模糊控制器的结构2、控制参数模糊化控制系统的输入为偏差e和偏差的变化率,输出为控制信号u。首先对他们进行模糊化处理。量化因子的计算比例因子的计算其中,为输入信号实际变化范围的最大最小值;,为输入信号论域的最大最小值。,为控制输出信号实际变化范围的最大最小值,输出信号论域的最大最小值。表1 被控参数的模糊化被控变量基本论域论域量化/比例因子e-1,1-3,-2,-1,0,1,2,3-1,1-3,-2,-1,0,1,2,3u-2,2-6,-4,-2,0,2,4,6相应的语言值为NB,NM,N
3、S,ZO,PS,PM,PB。分别表示负大、负中、负小、零、正小、正中、正大。3、确定各模糊变量的隶属函数类型语言值的隶属度函数就是语言值的语义规则,可分为连续式隶属度函数和离散化的隶属度函数。本系统论域进行了离散化处理,所以选用离散量化的隶属度函数。隶属度函数一般是根据操作人员的经验给出。设计中遵循的一般原则是:选择的隶属度形状越陡,其分辨率就越高,模糊控制的灵敏度就越高;相反,如果隶属度函数形状越平缓,其分辨率就越低,控制性能就越平稳。所以在误差为零的区域附近,要采用高分辨率的隶属度函数,而在误差较大的区域选择分辨率低的隶属度函数,使系统获得较好的稳定性。根据经验e,和u的隶属函数类型我们都
4、选择了类型。如图4所示。图4-1型控制器偏差e的隶属度函数图4-2型控制器偏差变化率的隶属度函数图4-3型控制器输出u的隶属度函数4、建立模糊控制规则 模糊控制规则对模糊控制器是否能取得好的控制效果起着非常关键的作用。常用的建立模糊规则的方法有经验归纳法和合成推理法两种。所谓的经验归纳法,就是根据专家经验、操作人员的长期实践和推测经过整理、归纳和提炼后构成模糊控制规则系统的方法。合成推理法就是根据已有的输入输出数据进行模糊推理合成,建立模糊规则。 首先我们尝试了根据PID控制所得到的数据进行模糊推理,建立模糊规则,但是经过反复调试所取得的控制效果并不理想。于是我们转而采用专家经验归纳的规则进行
5、控制,在其基础上进行调整。模糊条件语言为if e and then u表2 模糊控制规则表e -3-2-10123-3NBNBNBNBNBNBNB-2NBNBNBNBNMNMNS-1NBNBNMNMNSNSPS0NMNSNSZOPSPSPM1NSPSPSPMPMPBPB2PSPMPMPBPBPBPB3PBPBPBPBPBPBPB5、模糊控制查询表的建立 根据语言变量E和EC论域的量化等级,按照上面合成推理的方法,分别计算不同模糊变量值输入组合情况下的各个输出值,就可以获得一个模糊控制查询表。这将是一个77(49点)的控制表。在状态观测器中,同时输入e和的值,点击回车键,就会自动显示u的值。如图
6、5。图5模糊推理规则观测器计算输出值按照此方法,依次计算出u的值。表3 模糊控制查询表e -3-2-10123-3-5.32-5.3-5.3-5.02-5.02-4.63-4.63-2-4.68-4.65-4.16-3.59-3.21-2.81-1.39-1-4.27-3.41-2.71-2.13-0.762-0.3182.170-3.18-1.7-1.2101.211.73.181-2.170.3180.7622.132.713.414.2721.392.813.213.594.164.654.6834.634.635.025.025.35.35.326、模糊控制器的构建及调试利用中的模糊工
7、具箱构建模糊控制器,并且添加到控制系统中。为了消除稳态误差,仍然加入积分环节,根据PID调试结果,选择积分系数=0.8。将选择开关拨到模糊控制器,响应曲线如图6。图6 调整前模糊控制响应曲线我们发现在没有调整的情况下模糊控制器的控制效果非常差。于是我们调整对隶属函数曲线的宽度、隶属函数的类型来改善控制效果。在调整的过程中我们发现,越靠近中间的曲线的宽度和类型对响应输出的影响越大,而最左和最右边曲线的宽度和类型对输出的影响最小。通过适当增加e中间曲线的宽度,减小中间曲线的宽度,超调量减小,调节时间加快,调整后的隶属函数曲线如图7所示。图7-1 调整后的型控制器偏差e的隶属函数图7-2 调整后的型
8、控制器偏差变化率的隶属函数图7-3 调整后的型控制器输出u的隶属函数经过调整后,输出响应得到了较大改善,超调量减小,调节时间加快,调整后的响应曲线如图8所示。调整后,阶跃响应的超调量为,调节时间为。图8 调整后的模糊控制器响应曲线调整后的控制规则表面如图9所示。图9 模糊控制器控制表面图调整后的控制量变化如图10所示图10 控制量变化图三、 结果对比在传统PID控制器以及模糊控制器控制下的响应曲线对比图如图11所示。图11 系统阶跃响应对比图主要性能指标对比如表4。表4 主要性能指标对比调节时间超调量稳态误差PID控制器2.04s00模糊控制器1.94s2.06%0四、 结果分析1、 在传统P
9、ID控制中,先利用自整定方法找到控制参数的大致范围,进行微调之后响应曲线基本符合要求。超调量为0,调节时间也接近要求。2、 与传统PID控制器相比,模糊控制器在本例中并没有体现出较大的优势,调节时间虽然稍微缩短,但有了一定的超调,响应曲线没有PID控制平滑。这跟传递函数的选取也有一定的关系,当改变被控对象后,我们发现模糊控制器的控制效果确实优于PID控制。本例中PID控制效果很好,这也导致模糊控制改善调节效果的余地比较小。3、 隶属函数的线型对控制效果的影响。一般工程应用中,选取三角型和高斯型分布比较多。三角型可以加快调节时间,高斯型使响应输出更稳定,我们根据快速性和稳定性的要求进行选取,在本
10、例中我们发现高斯型曲线调节效果更好。4、 隶属函数的宽度对控制效果的影响。我们发现最中间的隶属函数的宽度对控制效果的影响最大,越靠近边上的影响越小。e中间的隶属函数宽度越大,超调量越大;越小,震荡越明显,甚至会出现不稳定,稳态特性变差。ec中间隶属函数的宽度越大,超调量越大,但调节时间越小。u中间隶属函数宽度越大,超调量越大;越小,震荡越明显,动态特性变差。5、 模糊控制器的控制规则对控制效果的影响。开始我们尝试根据PID控制器的结果采用合成推理的方法设计控制器,但是经过反复调整之后控制效果并不理想。于是我们采用专家经验法设计控制器,效果有所改善,说明了简单地根据PID控制结果设计模糊控制规则并不合理,模糊推理机制比较复杂的,要受到多方面因素的影响。6、 量化因子和比例因子对控制效果的影响。当误差e和误差变化率较大时,应选取较小的和以降低对输入量e和的分辨率;同时取较大的增大控制量的变化,加快系统的过渡过程。当误差e和误差变化率较小时,应选取较小的和以提高对输入量e和的分辨率;同时取较小的增大控制量的变化,抑制系统响应超调量的增加,是系统尽快达到稳态。7、 对于本例中简单的被控对象,模糊控制并没有体现出较大的优势。但是对于一些复杂的系统,往往难以建立它的数学模型,而传统的控制理论都是建立在精确的数学模型的基础上的,这种情况下运用模糊控制的方法往往能取得比较好的控制效果。
- 温馨提示:
1: 本站所有资源如无特殊说明,都需要本地电脑安装OFFICE2007和PDF阅读器。图纸软件为CAD,CAXA,PROE,UG,SolidWorks等.压缩文件请下载最新的WinRAR软件解压。
2: 本站的文档不包含任何第三方提供的附件图纸等,如果需要附件,请联系上传者。文件的所有权益归上传用户所有。
3.本站RAR压缩包中若带图纸,网页内容里面会有图纸预览,若没有图纸预览就没有图纸。
4. 未经权益所有人同意不得将文件中的内容挪作商业或盈利用途。
5. 装配图网仅提供信息存储空间,仅对用户上传内容的表现方式做保护处理,对用户上传分享的文档内容本身不做任何修改或编辑,并不能对任何下载内容负责。
6. 下载文件中如有侵权或不适当内容,请与我们联系,我们立即纠正。
7. 本站不保证下载资源的准确性、安全性和完整性, 同时也不承担用户因使用这些下载资源对自己和他人造成任何形式的伤害或损失。
