 坐标测量技术
坐标测量技术

《坐标测量技术》由会员分享,可在线阅读,更多相关《坐标测量技术(5页珍藏版)》请在装配图网上搜索。
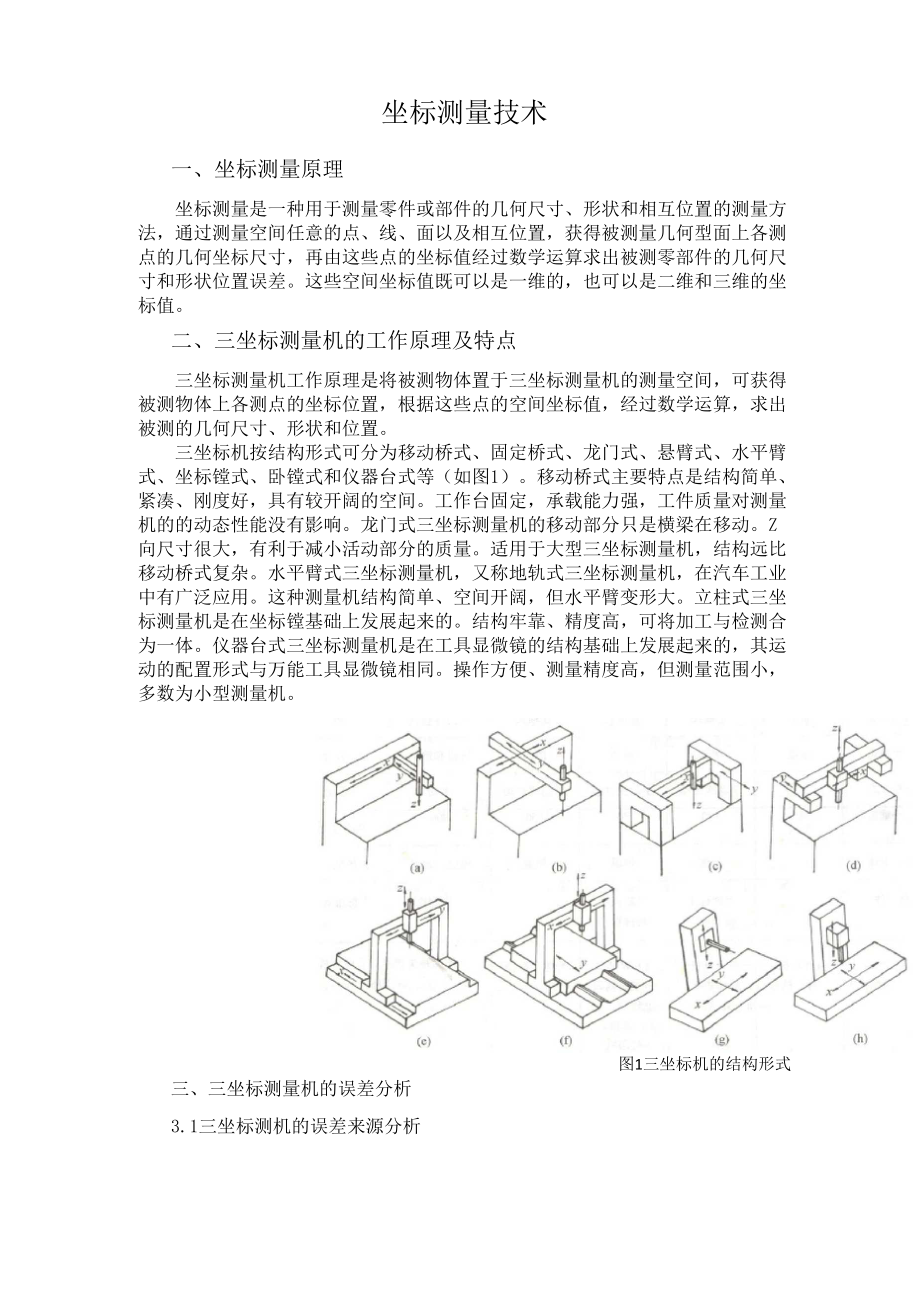
1、坐标测量技术一、坐标测量原理坐标测量是一种用于测量零件或部件的几何尺寸、形状和相互位置的测量方 法,通过测量空间任意的点、线、面以及相互位置,获得被测量几何型面上各测 点的几何坐标尺寸,再由这些点的坐标值经过数学运算求出被测零部件的几何尺 寸和形状位置误差。这些空间坐标值既可以是一维的,也可以是二维和三维的坐 标值。二、三坐标测量机的工作原理及特点三坐标测量机工作原理是将被测物体置于三坐标测量机的测量空间,可获得 被测物体上各测点的坐标位置,根据这些点的空间坐标值,经过数学运算,求出 被测的几何尺寸、形状和位置。三坐标机按结构形式可分为移动桥式、固定桥式、龙门式、悬臂式、水平臂 式、坐标镗式、
2、卧镗式和仪器台式等(如图1)。移动桥式主要特点是结构简单、 紧凑、刚度好,具有较开阔的空间。工作台固定,承载能力强,工件质量对测量 机的的动态性能没有影响。龙门式三坐标测量机的移动部分只是横梁在移动。Z 向尺寸很大,有利于减小活动部分的质量。适用于大型三坐标测量机,结构远比 移动桥式复杂。水平臂式三坐标测量机,又称地轨式三坐标测量机,在汽车工业 中有广泛应用。这种测量机结构简单、空间开阔,但水平臂变形大。立柱式三坐 标测量机是在坐标镗基础上发展起来的。结构牢靠、精度高,可将加工与检测合 为一体。仪器台式三坐标测量机是在工具显微镜的结构基础上发展起来的,其运 动的配置形式与万能工具显微镜相同。操
3、作方便、测量精度高,但测量范围小, 多数为小型测量机。图1三坐标机的结构形式三、三坐标测量机的误差分析3.1三坐标测机的误差来源分析三坐标测机的静态误差来源主要有:三坐标测机本身的误差,如导向机构 的误差(直线、回转)、基准坐标系的变形、测头误差、标准的误差;与测量条件 相关联的各种因素引起的误差,如测里环境的影响(温度、尘埃等)、测量方法的 影响以及一些不确定因素的影响等。对于一般的三坐标测量机而言,机构误差主 要是指直线运动部件误差,包括定位误差、直线度运动误差、角运动误差、以及 垂直度误差。图2给出了三坐标测量机主要误差源的分解示意图。机枸避差直缆运动网曜.回转遂动部件褒差 简单力变形误
4、差定位误差包括阿JQ谡差) 宜城度遥动误差角运动误爰垂冠度误差集杂力变形误差为变形误差I供雌变化引起的力变影误翅工件重量影响 携测都件重彩响三坐愫醐:林,被沸二件的力交形 硬件耕变形谡差那量耐象热变形误是推误差测头探测谡菱割睹等效直税的赂响测头答向鼻性接触焉去摩擦引起的误差I测头附件谡差动囊形与位移误差动参识差劫荔探调谡差,用靖与工件的碰撞图2三坐标测量机主要误差源的分解示意图3.2误差分析方法三坐标测量机共有多项误差源。为了提高测量机的测量精度,必须对测量机 的各个单项误差进行精确的分离。测量机各个单项误差的分离,通常是在测量机 各个方向测量范围内确定有限的离散点以测得误差值,利用数据拟合方
5、法将离散 的误差值拟合成连续光滑的误差曲线,获得其它测量点的误差数据,代入误差修 正模型进行修正。目前采用的拟合方法主要有三种:1)分段线性拟合:将相邻的两离散误差值用直线拟合,整个误差模型为分段 线性模型。此方法简单,但在离散误差值附近的曲线不光滑,拟合误差较大,适用 于低精度的误差曲线拟合。2)最小二乘拟合:对测得的所有离散误差值用最小二乘法拟合成曲线,使离 散误差点附近的曲线连续光滑,整个误差模型为一个确定的函数。模型简单,插值 方便,但测得的离散误差点均不位于所拟合的误差曲线上,造成已知的精度损失。3) 样条函数拟合:按样条函数理论,每个已知的离散误差点均是样条函数的 节点,采用三次样
6、条函数进行拟合,可以得到处处连续光滑的误差曲线模型,而且 测得的离散误差点均位于所拟合的误差曲线上,拟合精度高,具有普追适用性。因 此本论文中测量机单项一维误差数据拟合的方法主要采用三次样条函数。3.3基于三次样条插值的测量机单项误差拟合方法3.3.1三次插值理论若函数S (x) e Ca,。,且在每个小区间%, %+1上是三次多项式,其中a x x x = b是给定节点,则称S(x)是节点x ,x -x上的三次样条函数, 01n01 n若在节点x.上给定函数值y, = f () (i = 0,1,2 n),并成立:(1)(2)S(x) = y(i)(i = 0,1,2 n),则称S(x)为三
7、次样条插值函数。可表示为:PQ(x),x0,气S (x)=P(x),x ,x 112Pn 1( x), xn 1, xn 使满足下列条件:W1S(x) = y(i = 0,1,2 n); 在每个小区间xx.+1 上是一个三次多项式; 在内节点上,S(x)具有连续的一阶和二阶导数。在区间x., x.+1 上的三次样条函数为:p (x) = y + (x-x )f x ,x + 上(x-x )pg(x) + k + k (3)iii i i+1 6i+1 ii i+1三次样条函数S(x)逼近f(x)是收敛的,并且也是数值稳定的,当n T +3时, 误差估计式如下:llf(x) -S(x)l V 土
8、llf (x)ll h4 33843|f(x)-S,(x)| 土|f3| h3(4)33|f(x) - S”(x)| 1 f ”(x)| h2383其中:h = x x , h = max hi i i-1i1i n3.3.1基于双三次样条原理的测量机相关性三维误差建模I a x b设xy平面上矩形区域DI 为测量空间,若对其作一个均匀矩形分划: c j dfa = x x x x = bx x = h i = 0,1,2 nJ 012n ,其中 ii1c = j v j vj j = d y j = g j = 0,1,2 mV 012njj1函数f(x,y)是定义在平面区域D上的足够光滑的
9、二元函数,而函数S(x,y)在平面区域D上满足下列条件:1) 插值条件:S = S(x , j ) = f (x , j ) (i = 0,1,2 n, j = 0,1,2 m)i, j i ji j2) 边界条件:边界上节点的一阶法向偏导S(1,0)(x , j ) = f d,o)(x , j )ijij(i = 0,1,2 n, j = 0,1,2 m) ; S(0,1)(x , j ) = f (0,1)(x , j ) (i = 0,1,2 n, j = 0,1,2 m)ijij及四个角点处的二阶混合偏导数S(1,1)(x , j ) = f (1,1)(x , j ) ijij(i
10、 = 0,1,2 n, j = 0,1,2 m)是已知函数f (x, j)的双三次样条插值函数。双三次样条函数S(x,y)在单个子矩形区域D”上的具体表达式为:S(x, j) = XA(h)C Ar(g)Yt(x, j) e D(5)其中:X = (x 一 x. )3,(x 一 x. )2,(x 一 x. ), 1;y = (j j )3,(j j )2,(j j ),1;ii1i1i1ii1i1i12211 一2 211hh3 h 2h 2g3 g3 g2g233 2 133 2 1A(h)=, , ,;A(g)=h 2h2h hg2 g2gg0010001010001000SSqq、i1,
11、 j1i 1, ji 1, j 1i1,jSSqqC =i , j 1i, ji, j 1i, jij pprri1, j1i 1, ji 1, j 1i 1, jPprr1i , j 1i,ji,j 11 ,j因此,根据以上分析即可依据三次样条插值的原理求出三坐标测量机的静态相关 性误差。四、三坐标测量机的误差补偿三坐标测量机采用几何误差补偿技术始于20世纪70年代后期。早先的误差 补偿技术只能进行单轴方向的修正,此后一些学者陆续提出了各种误差补偿数模 型,有W.J.Love和A.J.Scarr等假设构件沿各运动副移动时的转角误差偏角 (yaw)、摇摆(pitch)、滚动(roll)均为常数,用三角几何方法导出误差关系。 Dr.R.Schultschik用封闭矢量法导出空间坐标误差的数学模型。80年初,Dufour 和Gropppeti提出了空间网格法。我国天津大学张国雄教授基于刚体运动模型 假设,通过一系列坐标变换和矩阵分析的推导,得出21项基本误差和空间综合 测量误差关系的数学模型,也称之为误差合成法。这种广泛应用的刚体运动几何 误差补偿模型描述了三坐标测量机各运动构件的21项基本运动误差与坐标测 量误差的关系。
- 温馨提示:
1: 本站所有资源如无特殊说明,都需要本地电脑安装OFFICE2007和PDF阅读器。图纸软件为CAD,CAXA,PROE,UG,SolidWorks等.压缩文件请下载最新的WinRAR软件解压。
2: 本站的文档不包含任何第三方提供的附件图纸等,如果需要附件,请联系上传者。文件的所有权益归上传用户所有。
3.本站RAR压缩包中若带图纸,网页内容里面会有图纸预览,若没有图纸预览就没有图纸。
4. 未经权益所有人同意不得将文件中的内容挪作商业或盈利用途。
5. 装配图网仅提供信息存储空间,仅对用户上传内容的表现方式做保护处理,对用户上传分享的文档内容本身不做任何修改或编辑,并不能对任何下载内容负责。
6. 下载文件中如有侵权或不适当内容,请与我们联系,我们立即纠正。
7. 本站不保证下载资源的准确性、安全性和完整性, 同时也不承担用户因使用这些下载资源对自己和他人造成任何形式的伤害或损失。
