 目标跟踪的多传感器数据融合
目标跟踪的多传感器数据融合

《目标跟踪的多传感器数据融合》由会员分享,可在线阅读,更多相关《目标跟踪的多传感器数据融合(28页珍藏版)》请在装配图网上搜索。
1、目标跟踪中的多传感器的数据融合:综述摘要一用分布的多传感器进行目标跟踪在自动机器人、军事应用和通信系统等领域中是非常重要 的一项工作。在这篇综述里,我们回顾了一些通过传感器的数据融合形成的鲁棒性跟踪的智能 计算的方法。本文讨论了多个算法在JDL模型的不同层次的应用,并且强调了在不同应用环境 中的缺点和优点。关键词一分布式传感器,跟踪,信息融合,数据融合1引言把多传感器的结果结合起来,相比单个传感器1, 2而言,其可以产生更为精确的信息;这可以 从现有的传感器或者小的或者是便宜的传感器中提高性能。本文补充了陆标3 主题的综述,增加了 最近10年的一些值得注意的突破,比如传感器管理和分布感应。多传
2、感器数据融合(Multi Sensor Data Fusion,MSDF)尽管大多数文献提到了军事目标跟踪4或者自动机器人这两领域,但是其 可以应用到很多领域。军事分布的数据融合使得网络中心战(Network Centric Warfare,NCW)6, 12或者网络使用能力(Network Enabled Capability,NEC) 7变得方便。如果诸如战争和航天飞 机之类的平台能通过网络互连并且进行数据共享,那么可能会收集到比他们各自的传感器得到的数 据更为精确的数据。一个NEC系统包括三个主要成分8:1. 用一个传感器的集合生成观测值2. 产生一个自动把数据转换成信息和知识的处理系统
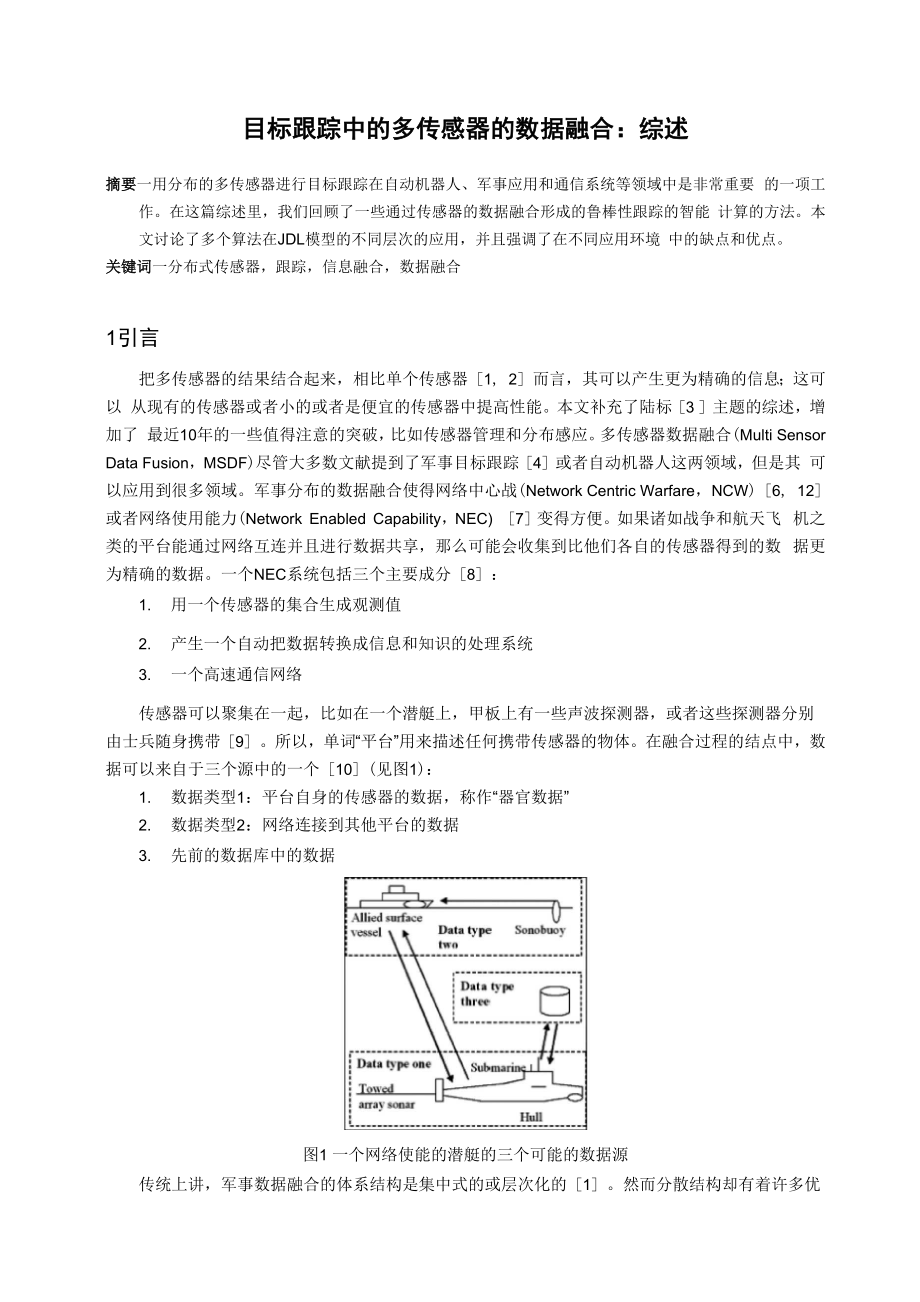
3、3. 一个高速通信网络传感器可以聚集在一起,比如在一个潜艇上,甲板上有一些声波探测器,或者这些探测器分别 由士兵随身携带9。所以,单词“平台”用来描述任何携带传感器的物体。在融合过程的结点中,数 据可以来自于三个源中的一个10(见图1):1. 数据类型1:平台自身的传感器的数据,称作“器官数据”2. 数据类型2:网络连接到其他平台的数据3. 先前的数据库中的数据图1 一个网络使能的潜艇的三个可能的数据源传统上讲,军事数据融合的体系结构是集中式的或层次化的1。然而分散结构却有着许多优点, 包括进程负担轻,没有单个集中式的数据库的需求,通信开销小,数据流瓶颈的可能性降低以及由 于单个结点的故障的高
4、存活力。为了使集中式的数据融合变得容易,需要考虑三个主要问题:1. 体系结构一如何使结点连接和共享信息。如要详细了解MSDF的方面,文12 13和14 用了一个军事的观点,文15 讨论了一个自动系统。2. 传感器管理一不同的战术目的,如何放置传感器最大化区域的覆盖范围。163. 算法如何处理这些过程。尽管本文主要讨论了 MSDF的军事应用,也很容易将其运动到机器人学习中。机器人在未知的 环境中需要移动。由于诸如花费、可靠性和方便使用之类的因素,这种机器人身上最普通的两个传 感器是超声波探测器和数字视频摄像机17,18。MSDF要求把数据结合起来并处理。传统可用一 些Kalman19和贝叶斯滤波
5、器进行处理;然而,最近几年,有朝着模糊逻辑和人工神经网络20的 趋势方向发展。尽管已经提出了多于30个的融合结构21,最被广泛应用的数据融合模型是由美国库数据融合 联合局子委员会(American Joint Directors of Laboratories Data Fusion Subpane) 22。它把数据 融合过程分成四层,从而建立一个过程层次。尽管这是数据融合的仅有层次,并且主要集中研究军 事应用,但是却提供了一个有用的分类融合算法的结构。第2, 3, 4和5节是JDL模型的四个层次, 用来对相似算法进行比较。2 JDL第一层“对象提炼”对象提炼通常分成数据注册、数据关联、位置属
6、性估计和鉴定23。这四类和对应算法分别在 2.1,2.2,2.3和2.4节讲到。一些算法并不直接归属于某一单个类;例如,文24,25和26都建立 了把从两个或多个传感器中融合信息看作两个额外过程,建立了估计属性和鉴定的算法。关联和状 态估计也作为一个单独的步骤27来提高性能。2.1数据注册数据注册功能把数据指定到一个公共的参考框架中去。这经常从自我中心的Cartesian坐标系 改变到纬度,经度和海平面的高度。2.2数据关联关联这步是比较度量,并且尝试收集出自相同现实世界的度量使之为单个轨迹。难点在于区分 目标,如果有可能则区分每个度量的源泉。这主要由度量一跟踪联合处理的。在分布式系统中,关联
7、也可以作为比较不同的进程结点的行踪的一步,把估计同一个现实世界 目标状态的跟踪结合起来。这就是度量一跟踪联合。2.2.1, 2.2.2, 2.2.3, 2.2.4和2.2.5描述了数 据联合的多种方法。2.2.1 近近邻是联合的最简单形式。在该算法中,最近的度量确保此轨迹接近于更新轨迹。该算法非常 简单,能够通过很小的计算代价寻找一个可行的解决方案。然而,在密集的环境中,可能导致许多 对之间有着相似概率,所以错误会很大28。另一种相关的技术是“所有的邻居”:在门限范围里的所 有度量包括在轨迹之内28。2.2.2 联合概率数据关联(Joint Probabilistic Data Associa
8、tion, JPDA)Bar-Shalom等建立了两个相关滤波器。第一个是概率数据关联(Probabilistic Data Association, PDA) 29。其只对单个目标的情况工作。所有的在门限范围的轨迹附近的度量假定作为轨迹的更 新。对每个有效的度量计算其关联的后验概率。这些概率值用来作为权重以计算带有权值的平均度 量更新,并把它加到轨迹上去。第二个滤波器是JPDA30,它是PDA在多目标情况的扩展。在所有的目标之间计算度量到目 标的概率值。对JPDA工作来说,每一个度量必须假定落入有效区域内以保证所有错误度量的概率 密度函数是一样的31。Bloem和Blom32发现了对于轨迹建
9、立没有明确的办法,但是他们假设轨迹已经存在。如果不 提供具体的推理,当新的目标出现,他们就会被理解为旧的轨迹,而不是建立他们自己的新的轨迹。 另一个问题是,所有的度量更新所有的目标,意思是如果一个轨迹被噪声初始化,它将会被更新, 并且它附近其他的轨迹使之一直保持更新。由于没有固定的方法解决过期轨迹,因而加重了该问题 的严重性。PDA和JPDA的计算复杂度都是指数型的。由于这些问题,文32提出了一个新奇的基于最近邻居的方法一一严格的最近邻居PDA(Exact Nearest-Neighbor, NNPDA),并且发现其在没有聚集的情况下比JPDA计算更高效、更精确。JPDA处理聚集的能力与ENN
10、PDA避免轨迹同化的能力结合在一起,也就是我们知道的轨迹联 合来建立双PDA(Coupled PDA, CPDA)33。在目标处于低速下,算法性能远远超过标准的JPDA; 在高速情况下,这三个算法的性能是收敛的34。JPDA也已经扩展为多传感器PDA(Multisensor JPDA, MSJPDA)。它的性能比最近邻居算法的多传感器JPDA和单传感器JPDA都要好。2.2.3拉格朗日松弛由于多传感器跟踪多目标,数据关联问题看作是NP难题。文37的证据表明,在所有的可能下, NP难题在计算高效下不能解决。但是许多近似算法可以找到近最优解。拉格朗日松弛就是这样一类 技术。Pattipatti等3
11、6首先把这种方法应用到数据关联问题中去。他们的解决保证多项式时间性能, 并且内存需求只是O(n3)。该算法由两阶段组成:首先是把代价指定到所有可行的关联,同时在第二 阶段,通过3维指派算法得到使得通用似然率最大化的可行解。2.2.4人工神经网络跟踪数据关联选择基于多传感器的轨道,并且试图把与同一目标对应的轨道关联或成组。多于 两个目标时,该问题就变成了 NP难题,因此需要寻找近似的方法来解决。Winter和Favier38提 出了一个用神经网络的方法来解决该问题。文38说明了该神经网络方V 基于Hopfield的神经 网络,总是找到17.4%时间的最优解,找到其余时间的近似正确解。2.2.5模
12、糊推理普遍使用的PDA和JPDA的缺点在于,随着目标数的增加,计算时间量指数增长。模糊推理算 法用“常识”代替数学来寻找解决办法39。Hong等设计了一些数据融合的模糊规则,并把数据转换成带有下列值的模糊集NL, NS, ZO, PS, PL(大负数,小负数,零,小正数,大正数)。这些结果40表明用模糊推断会导致相比较JPDA 较低的平均RMS位置误差。模糊集越多,精确度越高。模糊多目标跟踪系统的计算代价比JPDA 要低。尽管越多的模糊集意味着越高的精确率,但同时也增加了计算负担。所以,为达到所要求的 精确度必须选择合适数量的模糊集。模糊数据融合算法(Fuzzy Data Fusion, FD
13、A) 41用类似于JPDA的方式处理数据关联,尽管 输入和输出值在模糊集中被编码。对雷达进行红外线融合,我们发现对实验中模拟目标其比JPDA 的RMS位置误差要小得多。也证明了 FDA的计算开销比JPDA低。在文42中,Wang等用传统的雷达来看待融合电子支援度量(Electronic Support Measures, ESM)这个问题。在水面之上,雷达是最重要的传感器,因为其能为传感器的方位和距离提供精确的 目标定位信息。ESM是被动的,检测目标发射的雷达信息,所以只能产生角度量。由于目标可能有 许多发射者,因而有可能用多ESM轨迹融合单个雷达轨迹。在此研究中,Wang等计算了一个模糊 合
14、成相似度,其是基于雷达度量预测的方位和实际用ESM传感器测出的方位两者之间的残留。通过 计算两个阈值来建立模糊集描述ESM和雷达数据的相关性。对于其中的一对,有:1. 稳定的相关性,ESM信号和雷达轨迹吻合。2. 暂时性的相关,ESM可能和雷达轨迹一致。3. 暂时性的不相关,ESM可能和雷达轨迹不一致。这使得该算法能够确定哪些轨迹和哪些雷达轨迹融合。2.3位置/属性估计位置和属性估计是选择关联度量和计算目标状态的过程。目标运动分析(Target Motion Analysis, TMA)的一个例子是被动雷达。被动雷达只能测出目标的方位,而不是距离。有必要运行TMA来 计算目标的距离和速度。在2
15、.3.1, 2.3.2, 2.3.3, 2.3.4和2.3.5中,我们回顾了最通用的位置/属性 估计的方法。2.3.1卡尔曼滤波器卡尔曼滤波器(Kalman Filter, KF)43在 60年代首先提出来,自此就成了目标跟踪和机器人导航 中最常使用的方法。已经证明了基本的KF是贝叶斯滤波器44的一种形式,而贝叶斯滤波器是线 性高斯系统的最优估计。假定有一系列的噪音度量,KF能够估计系统的状态。KF的扩展是扩展的KF(Extended Kalman Filter, EKF)45。这能确保诸如只有方位的被动雷达 数据的数据在KF中使用。由于线性化的步骤,EKF是次最优的。EKF在移动机器人导航的
16、传感器 融合文献中是最流行的工具。KF和EKF两者原来都是用在单个传感器上。Willner等46首先提出了把位于集中融合结点上 的本地传感器联合起来,以形成更为精确的全局估计。该算法的缺点是每一个本地传感器都需要全 局估计,而全局估计需要双向通信并且否定了并行化的优点。文47已经证明了,当KF用在集中融合结点上以融合多个本地KF的结果。这些结果可以通过 把全局估计反馈到本地滤波器以作为下一步迭代的先前状态来提高性能。由于本地滤波器的输出在 时间上是相关的,如此一个系统的性能可以得到提升,只有通过把每一个的第n个度量输出到全局 跟踪器来得到接近的最优性能48。KF和EKF的信息理论的观点在133
17、中讨论。信息滤波器(Information Filter, IF)或者是转置 协方差滤波器是估计状态向量的KF。信息状态向量由y=P-1x定义,其中x是传统的状态向量,P 是其协方差。信息状态向量的协方差是状态向量的协方差的转置,也是我们所知的Fisher信息矩阵 或者信息矩阵。以这种方式,滤波器直接估计信息矩阵。该形式的滤波器尤其在状态向量比度量向 量大的时候显示出优势。另外,没有物体被跟踪的先验知识的情况,可以由把信息矩阵初始化零29 的表示方式解决。用KF/EKF做需要把协方差矩阵的元素设置为无限,事实是不可能的。在度量模型高度非线性化的情况,甚至EKF有可能出现分歧。在这种情形下,算法
18、的Sigma 点卡尔曼滤波(Sigma Point Kalman Filter, SPKF)族可以使用50。SPKF不是循环算法的期望,而 是在平均值附近的精确选择出来的点循环聚集。用一些点,非线性可以更加精确的建模。一些点的 使用可以使之变得与粒子滤波(见2.3.4节)相似;然而,SPKF需要一个较少点的幅值的顺序,所 以计算开销大大降低。SPKF包括Unscented卡尔曼滤波(UKF)51。Van der Merwe等52发现, 甚至UKF都仍然局限于高斯分布。2.3.2多模式算法自20世纪60年代人们开始提出了静态算法,尽管近年来还没有可用的可实施的算法。如果用 在滤波器中的模型不同于
19、现实系统动力学,那么该滤波器将会出现差异。如果系统有多种运作方式, 那么上述这种情况可能发生。而滤波器只能描述其中的一个。由于目标通常沿着一条直线运动,目 标跟踪将会落入此类情形;但是在演习部队改变方向或速度,目标可以有一个短暂时期。53伴随着Markov模型的转移是简单的,并且对有着变时参数的系统来说更为现实。两种大多数普 遍使用的模式是广义假贝叶斯(generalized pseudo-Bayesian,GPB)54,55和交互多模式 (Interacting multiple model, IMM)56。两者都用了一组滤波器,尽管IMM可能需要的要相对少些。 这些方法的优点是模块性;使用
20、的滤波器可以是KF或者是EKF甚至是PDA或者JPDA57。IMM基线 是混合系统的最简单形式。每个滤波器都是一个标准的Kalman滤波器,其中每一个Kalman滤波器 都表示了一个不同的模式,比如说停止或运动58。IMM同时也用来作为静态平滑。过滤只使用过去的度量,而固定间隙(lag)的平滑会延迟该进 程通过固定数目一一N个的更新。由于这些延迟,经过一段时间可以上升到 N个度量。Chen和 Tugnait59提出了基于IMM的固定间隙的平滑器,并说明了在平均平方误差情况下其精度可以成比 例的增加到间隙。任何形式的间隙平滑,不可避免的导致了接受度量和计算目标状态估计这两者之 间的延迟。度量的延
21、迟也成比例的到间隙。零间隙的平滑器所以是一个滤波器。IMM通常用来和诸如JPDA的关联技术联合起来以形成一个多目标的跟踪系统。如此算法可以用 来跟踪接近的进行演习的目标60,61或者聚类里的目标62,63。这都是把JPDA的数据融合的 步骤和IMM的状态估计的能力结合起来。Hwang等用了一个混合的IMM JPDA算法在航空交通控制 中来跟踪飞机64。2.3.3多分辨率滤波器数据可以看作是其达到的粒度层,或者也可以简单的看作是用小波变换得到的低粒度层。把不 同数据粒度层结合对数据进行运做,我们称之为分辨率过滤器。这类技术已经成功应用到图象处理 中以提高性能。但是,直接用该技术来对处理图象以得到
22、目标跟踪进行是不可能的,因为图象处理 必须作为一批处理方法进行的,而目标跟踪和信号处理必须在新数据到达时必须给出新的估计。文65,66,67和68克服了这些难题,通过把数据划分成块以把MRF应用到目标跟踪和信 号处理中。这样把数据表示成一个树的结构,而最顶层表示最高的精确度,即原始数据69。这样可 以被描述成一个低通滤波器;由于数据从高层粒度到低层粒度传播,信号的高频率成分就被消除了。所用的算法是IMM70的一种形式。在任何多模式算法中,知道什么时候目标正在演习是重要 的,所以该算法可以从一种模式转移到另外一种模式去。任何跟踪算法可以用在每一层,近邻和JPDA 两者都工作的很好71。由于在最低
23、层可获得的数据相当少,算法将会运行的比较快,而计算时间也 增加了。在不同层用不同算法可以显著降低计算时间。如在最粗层发现了演习,则下一层检查是否 演习可以被检测出来。如果检测出来了,这样一个决策就被传播到下一层进行处理。最好层可以精 确的鉴定出什么时候演习发生。把工作量分散在处理层之间,证明其相对IMM/KF滤波器,可以提 高性能,尤其是在高背景噪音层的环境中72。最初,分辨率只能通过的2的整数次方降低,即整个,1/2比率,1/4比率等等。这种情况在文 73得到了改变,可以把数据分解成任意分辨率。Hong等74说明了相同的方法可以用来跟踪模糊 的或者平静的目标,Fan等75进一步把该方法扩展成
24、可以同时提高精确度和对多目标进行跟踪。2.3.4粒子滤波不幸的是,除了在模拟实验中,错误很少知道或者是高斯的,所以需要用任意概率密度函数的 过滤器方法。早期的方法试图提高EKF的结果,但是涉及到用IMM。设置不同的模式以表示不同的 高斯分布选择有权重的平均高斯结果,任意的分布都可以做为模式。然而,这种方法并不能自动的 应用76。直接的办法就是对概率密度函数进行建模从而把搜索空间分解成网格,用网格空间来表示概率 密度函数的点。然而选择网格是一件重要的工作,尤其在多维空间中,许多网格点可能变得有必要。粒子滤波器,或者是我们知道的Bootstrap, Condensation或者Monte-Carl
25、o滤波器,都会遇到 这个问题。不是用一个固定的网格代表概率密度函数,而是用可动的“粒子”。早期版本粒子过滤器使 用固定数目的粒子,导致了粒子向单点崩溃,并且像KF用不当描述的高斯一样出现差异。Cordon等78提出了一个“Bootstrap滤波器”或者顺序重要性重采样(Sequential Importance Resampling, SIR)。这样就带来了采样步骤,以防止滤波器发散,在每一步消除最低权重的粒子, 在最高权重的点建立新的粒子.Bootstrap过滤器证明了在非线性度量的系统中跟踪其精确度比EKF 要好,比如EKF只跟踪方位。从那以后,提出了一些该方法的变体,比如多目标跟踪79,
26、80和用 IMM PF方法的机动目标81,82和83。PF已经证明在分布式传感环境下特别有效的84。可以 在文85找到不同类型的PF的详细描述。2.3.5人工智能法用知道的统计学的传感器融合倚赖于Kalman滤波和Bayesian统计学众所周知的技术。对不确 定性没有具体的统计模型,其他方法,比如基于规则的传感器融合,模糊推理和神经网络可以代替。基于规则。多传感器数据融合的一种最简单方法是Flynn86提出的,他给出一个简单的启发式 规则的集合,该集合常常用在自主移动机器人以融合两个并排的传感器数据,其中一个是超声波传 感器,第二个是接近的红外传感器87。虽然规则集很简单,但是往往很有效,通常
27、以此作为基准来 比较许多新的人工智能融合方法。人工神经网络(ANN)。许多作者87,88,89,90,91,92已成功应用神经网络到传感器融合中 去。反向传播(BP)网络已经被用来作为航行能力,可以与尖端方法相媲美93。多层网络需要非常长 的训练时间,需要有替代方法来优化网络规模。径向基函数网络(LRF)比BP训练快,因为只有一层 权重需要改变。ANN的一个问题是确定合适的隐藏单元。Ash95提出动态结点生成(Dynamic Node Creation, DNC)系统,开始用一个小的网络,然后定时增加其大小,直至网络足够大可以处理任务了DNC 后来被Ghosh和Holmberg96应用到数据融
28、合中去。他们发现给定许多大量的结点,反向传播网 络通常有训练过度的倾向,而把LPF和DNC结合起来却不会有这样的问题,尽管输出编码网络是 最有效的网络类型。目标状态估计也可以利用神经网络。比如,受大脑启发的接触估计(Neurally Inspired Contact Estimator,NICE)97是一种基于神经网络算法的目标运动分析(TMA)。NICE算法与最大似然估计 具有同等的精确度(MLE),但是其量级更快。最近,遗传算法(GA)被用来设计神经网络以数据融合。Abdel-Aty-Zohdy和Ewing98用这种技 术开发了一个电子笔的数据融合系统。模糊推理的自适应过滤器。Kalman
29、滤波器假定了过程和度量噪声协方差的先验知识。由于在 大多数实用系统中这种假设几乎很少满足,所以他们都是估算的。这对过滤器的性能不利,甚至可 能促进滤波器加快差异。因此,如果能解决这些问题,自适应滤波器比标准Kalman滤波具有更好 的性能。Escamilla-Ambrosio和Mort99提出模糊推理的自适应的Kalman滤波(FL-AKF)。这用模 糊推理来调整Q和R的值,以使之更好适应他们方差的估计值。这样在传感器故障诊断,异常排斥 以及错误不时变动下工作得很好。Sasiadek和Hartana101用三种新的技术来扩展这项工作:基于模糊推理的自适应C Kalman 滤波(FL-ACKF)
30、,基于模糊推理的自适应D Kalman滤波(FL-ADKF)和基于模糊推理的自适应F Kalman滤波(FL-AFKF)。所有这些都是基于FL-AKF的。结果表明,这些方法在异构传感器下用不 同的动力和噪音统计测量同一参数情况下很有效。FL-AKF已经用在自主机器人融合从里程计得到的位置资料与从甲板上声纳得到的数据101。 测量机器人轮子已经转动过的次数的里程计很容易漂移。声纳测量外部空间目标的距离,这将是准 确的,但能间歇性的得到。两个数据源的融合用来纠正里程计的飘逸。通常,这种融合是用KF进 行的,但是用FL-AKF可以表现出更为精确的结果102。2.4鉴定鉴定这一步是鉴定度量来源的物体。
31、由于本文的目的,它假定本地平台利用自身传感器数据来 生成它自己最好的目标标志估计和另一个标志的置信度值。一旦在本地鉴定后,必须融合远程估计 以形成了全局的解决。2.4.1贝叶斯推论贝叶斯推论(BI)是用概率表示置信度的方法。贝叶斯定理可以用来主观的信念估计0 Hall23 定义了一系列贝叶斯推论的问题,其中包括:1. 定义先验似然的困难2. 当有许多潜在的假设和许多条件独立事件的复杂度3. 假设必须互斥4. 不能在决策中描述不确定性2.4.2 Dempster-Shafer (D-S)规则的结合在一些环境下贝叶斯信念不再适用。后来,Shafer和Dempster104推广了传统的贝叶斯信念 模
32、型,允许了不确定性的明确表示。这样就要求了对一个分类算法对一个目标不能分类或者是不能 彻底地列出它所属的所有的类别的情形进行建模。然而,D-S不是没有问题。如果一个分类算法以99%置信鉴定目标为类型a,而另一个分类算 法以99%置信鉴定目标为类型b,但是两者都以1%的置信鉴定目标为类型c,那么D-S把这些结 合起来用100%的概率输出一个分类C。这是因为这是仅有的不冲突有的输出,但是结果却是反直 观的。Jiu等105认为相互冲突的总概率应该在所有的分类间作平均,这将导致一个更直观的例子, 在上一段中,分类a和b每个都在低于50%的信念,而c略高于1%。Yu和Yin106也找到了这一 问题解决方
33、法,他们把D-S合并到文107的并行决策结构中。这也解决了上述问题D-S已用于各 种融合环境,其中包括地雷探测108,自主机器人109和医疗系统110。全面列出的D-S和基于 贝叶斯的算法,见文111。2.4.3人工神经网络(ANN)神经网络系统是一个庞大的并行分布处理单元。数据不是分开存储处理的,因为他们内在的联 系。ANN的一个最困难的问题是选择最适合的网络拓扑。选择将取决于问题的特征,可能解决问题 的途径的特征以及需要建立的神经网络的特点。还有几种类型的学习规则,这些都是受生物启发和 网络如何学习的指导。在一个最早利用神经网络融合多传感器数据鉴定的例子中,文:112用传播和Hopfiel
34、d神经网络 鉴定目标。在反向传播中,数据提供给网络,再计算输入和输出的差额。改变权重以为改善结果。 一旦错误在所有的训练数据集中被最小化,系统对测试数据作好了准备。Hopfield网络有输入输出 的反馈,并给出动态响应。他们可以是不稳定,但迫使权重矩阵对称化并且主对角元为零可以确保 稳定。周期性网络形成一个联想记忆。因此,像人类记忆一样,如果提供了记忆的一部分,该网络 将返回全部记忆。给定有限信息,神经网络的联想性质可以用来鉴定目标。在给定的简单例子中, 网络在鉴定目标时不会出现单个错误。证明有可能使用神经网络来识别并鉴定目标。神经网络已被证明113是一个极其简便,容易的应用方法,在低层次的关
35、联比其他融合方法性 能要好。2.4.4专家系统虽然神经网络是好的通用问题解决者,但是过程往往过于繁琐,这些主要困难之一是寻找正确 量的训练数据,太少或太多的训练数据,系统便会做出错误的决策。Kittler114认为专家系统识别 每一个平台并且采用加权平均作为结果的鉴定决策。2.4.5投票和总和方法投票并求总和是两个热门,但是非常简单的分布分类办法。一个银行分类算法同时使用了这两 种方法;这些可以位于传感器或者在融合算法中。在求和融合中,每个假设的分类器的置信度被求 和,并且使用了最高的整体结果的假设。在投票融合中,由最高数目的传感器视为最有可能的假设 最终被选择。在融合数据的误差是高斯分布的情
36、况下,求和算法优于投票算法,而估计误差有一个 截尾分布115的系统中则相反。这些都已经用在在各种各样的情形下,如生物分类融合116,地 雷探测117 和目标跟踪118。2.4.6分布分类有可能在目标被检测的结点之间分布目标分类。大多数解决这一问题的方法都涉及到数据的集 中处理,要么在中央点分类,要么把本地分类结果融合在一起。Carseh和Withanawasam119建 立了一个模式,磁力计可以在汽车的磁性签名基础上进行分类。但是,这导致了每一个传感器结点 的计算量负荷增加,并且要求汽车的磁性签名对可能观测到它的汽车知道。这在文119 给出的的例 子下都是可接受的。例子中指出,汽车行驶在马路上
37、,而传感器安装在交通道路之下,但是有许多 检测情况太严格。Raghavendra等120给出一个方法,其用传感器交换目标特征向量,而该特征向 量可以用来分类。但是这带来很高的网络负荷。Duarte和Hu121 依靠每个传感器来分类目标,然 后分类集中融合,使得结点的计算量很大。Arora等122 用“影响场”来形成基于花费不高的二传感器的非集中的分布式分类器。他的这篇难 以置信的深入的文章,涵盖了所有分布式传感式的细节,从传感器的使用(磁力仪、雷达等),检测处 理,分类,跟踪和时间同步。分类在测量传感器探测目标和其影响领域覆盖的范围的大小和形状。 分类模块传递结果到跟踪器,跟踪分类一段时间,定
38、位并同时降低错误。构建分布式分类面临两难:是否采取所有节点的数据并且融合数据进行分类,称之为数据融合, 或者每个节点进行本地分类并融合分类结果,称之决策融合。数据融合比后者通常需要更多的网络 带宽。Brooks等123认为,如果数据所代表的信息是相关的,数据融合将是是更好的选择。,而决 策融合将会是更好的选择只要数据是不相关的。另外,文124证明决策融合在数据是无故障的情形 下工作的很好;然而当度量误差引入到系统中,其性能比数据融合下降得更快。3 JDL第二层一“态势评估”态势估计(Situation assessment,SA)融合数据的运动学和时间的特征,以建立警报暗示, 行动计划,关于军
39、事力量和信息的结论下的情况描述。SA算法决定目标是否以及如何采取或者可能 采取敌视态度。不幸的是,大多数研究是在低层融合,因此这方面125 不好理解。Looney和Liang126用一系列算法来进行态势评价。首先,统一的K集中值(UKCM)算法对 检测目标进行聚类分组,如果这些集群已形成,有可能使用模糊信念网络评估其内容。模糊信念网络 的简单规则集简单实验场景,说明了该方法能够进行态势评估,尽管这需要较为复杂的信念网络来 解决任何实际问题。这也是在非军事背景中有意义。比如上下文感知处理,其任务是开发出一个能理解和作出恰当 反应的机器。Wu等127从全方位摄影机和麦克风看多传感器数据融合,以检测
40、会议的出席者的注 意力的集中。在这篇论文中,Dempster-Shafer推理用来把传感器的处理过的输出结合起来,例如 会议地点和谁正在讲话。这些都用来提高每个与会者的注意力集中的估计值,从而与单个传感器的 输出结果相比较。4 JDL第三层“危险评估”第三层细化评估正对被跟踪的敌人造成的威胁。这也可能包括友军的与敌军有效交战的能力的 评估。融合第2层和第3层通常称为“信息融合”,而第1层则是“数据融合”。虽然这个区分是模糊地, 但是是有用的,因为高层往往运用符号而不是数学推理,其来得更为主观128。在人为因素的研究 中,往往被称为“环境意识(Situational Awareness,SA)。
41、JDL模型的第3层在文献中相对其他层次而言得到最少的关注。最初的论文开始以该主题出现, 尽管目前像理解这个问题的挑战一样去解决它。Salerno等21为起点环境感知的信息融合的框架提供了起点;并举了一个例子,在此情况下自 动的环境意识可能是有好处的。文章对公制可以用来验证环境感知方法的讨论进行了总结。Jakobson等129用认知的融合方法看待危险评估这个问题。把这个问题分解为三个方面:1. 态势意识,多传感器数据的意义理解,复杂时间依赖模式的识别以及确定威胁和其他暴露意 图的活动。2. 决议意识,思考情况并且理解有动机的行动的分枝。3. 知识意识,学习和改进融合步骤的技能,利用历史数据融合建
42、立新的模式和类别状态。把实时事件关联(EC)和基于案例推理(CBR)结合起来以制作一个威胁评估的通用框架。当EC 识别一系列相关事件,CBR可以用来鉴定该事件为一个案例,而案件增加附加的意思到事件的集合 事件和,并且推断出可能的状况。Jakobson等129提供了一个可行系统基,但建议进一步工作必须在一个系统用在实际问题领域之前完成。5 JDL第四层一“进程评估”进程管理阶段是一个对其他融合阶段的不间断的评估,以确保其他数据合并和融合在给出最优 结果的方式下进行。这也可以在融合过程中通过调整参数来提高结果,建立一个优先目标2,或者 移动传感器提高搜索区域的覆盖范围16。最优传感器调度问题与警报
43、布局问题(众所周知的NP完 全问题)和背包问题(众所周知的NP完全问题130)都紧密相关。Penny131,132找到了一种尽可能快的定位潜艇的策略。其用被动声纳浮标传感器,证明可 以降低检测次数到4次。Hernandes等133概括这些成果,建立了一个对聚类存在下目标跟踪中的 多传感器的系统化的管理框架。Niu等134,135给出了一个最优化分布传感器的及时方法,结果显示以高概率被检测并且一 个媒介或者高机动索引,那么时间交错的传感器(轮流更新到达的传感器)应该可以用。在其他情 况下,在交错的和同步(同时到达)传感器更新并没有什么关系。如果两个传感器性能大大不同, 然后使他们同步以得到最优的
44、结果。如果他们有相同或相似的性能,那么他们就应该交错均匀。多传感器管理(MSM)在文136中被讨论。作者认为传感器管理影响到JDL模型的各层。他们把 MSM描述成自上而下的方法,开始于第4层,但是继续下跌到第1级,如下: 第4层(任务规划) 从事哪种服务? 哪一个准确程度? 环境领域的重点是什么? 第3层(资源调度) 需要额外的传感器么? 新的传感器放置在哪? 第2层(资源规划) 多传感器跟踪的传感器选择。 传感器引导,一个传感器到另一传感器的跟踪。 第1层(传感器规划) 对每个传感器命令的时间轴。5.1分布感应进程评估也已经在分布式感应文献中覆盖。这里,这是一个动态的选择使用哪一个传感器来在
45、 最有效情形下获取信息。文137首先提出用Shannon信息论的思想,文138首先提出基于期望信 息增益的选择传感器。Wang等139最近说明了动态选择传感器请求数据的方法,以便使信息增益 最大化。Wang等139用贪婪选择下一传感器;在所有的没有用过的传感器中,其中信息增益最大 的那一个将会被使用。Moore等140提出了一个在分布结点上设计一个移动结点demon使用大多数有限资源系统。 该demon允许一个结点下载分类或者跟踪因为它发现需要他们。在此同时清除那些不再需要的结 点。这样允许系统动态配置本身。Friedlander等141延续140技术那里一个节点自身形成集群或 联盟的系统。这
46、避免了“维度灾难”(其在非常大的系统下非常麻烦)的问题。没有这一点,每个节点 将被迫与其他结点共享信息,这意味着每个结点加入到网络中,处理和通讯负担将会增加。同时, 在提出的模式中,结点只能与其处在同意联盟的结点共享信息。在其他的联合形成方法中,文142讨论了对自动结点如何形成动态联盟。动态联盟是一个工作 队,在单一结点没有足够的资源来执行任务时联合起来执行任务。节点学会组成联盟从而更为多产。 实验结果表明,这些合作的agent可跟踪目标跟踪,远胜那些个体地简单反应的跟踪器,并能够分享 计算资源,允许更快、更有效的处理。Hong等和Yadger等144讨论了建立层次的方法。在层次中,结点根据地
47、理分成联盟,每个联 盟选出一个领导者。在文143 中,每一个由联盟领导者分配一个轨迹领导者,并且该结点命令团队 中其他结点。该技术用冲突解决的策略工作,该策略是对结点给出两个相冲突的任务。所作的工作 其中有两个节点时需矛盾的任务。Yadger等144研究一个结构的层次数目是如何影响性能的,并 且发现,随着层次数目的增加,它可以跟踪到的目标数会减少;然而,为完成其任务的单个结点的 所需的时间量会指数下降。Ortiz等提出了一种基于拍卖(auction)的方法,叫做动态调解DM),形成并分配工作到合作 团队结点。在DM中,喊价(bid)不是简单的从一个特定结点的个别值,而是从一个团队结点的喊 价,
48、它可以诸如分配到该团队的其他工作的正的或负的交互的信息。145的实验结果表明,相比传 统的拍卖方法(时间是有限的)而言DM获得最大的性能提升。Liu等84通过把分配数据点到跟踪的目标和位置估计的这样一个过程分离来解决维数灾难。彼 此远离的目标用传统的方法是分离跟踪的,而接近的目标可以连带地跟踪。由于多于一个目标可以 被同时跟踪,概率密度函数不是高斯分布的。这样将导致84 用一个粒子滤波器来作为位置估计算法, 因为它可以估计任意分布。Akyildiz等已经关于该主题从网络的观点写了一篇综合的综述146。这给出了主要网络拓扑和 可获得的协议的描述,并下结论说在传感器网络里仍然存在没有解决的问题,比
49、如容错、可扩展性、 结点代价和功率消耗。在另外一篇综述中147,同样的作者概述了传感器网络的主要应用,比如: 军事应用,比如监控友军和战斗损失估计; 环境应用,比如鸟迁移,或者洪水检测; 卫生应用,在医院内跟踪医生,或者远程监控病人的生理数据; 家庭自动化6多传感器跟踪的挑战分布式多传感器主要有两个挑战:1)数据到达的顺序可能对无序抵达的过程和度量不适合;2) 一个传感器对另一个传感器或者数据相关性的影响。6.1 无序度量(Out of Sequence Measurements, OOSMs)每个度量在一个离散的“时间戳”到达融合算法。在一个多传感器跟踪系统中,将有来自不同的数 据源的许多传
50、播次数,显然一些数据是以无序抵达的(在大多数多传感器系统中是可能的)。典型的, 融合系统只保留最重要的统计数据的历史,如状态估计与协方差矩阵。所以,问题在于用OOSM寻 找一种方法来更新当前估计。早80年代前OOSM 一直是个问题148。解决延迟度量的早期尝试倚赖于在度量建立和处理期 间这两者接收到的非新的度量149,150。这些方法都是有效的,但只解决了数据被延迟的问题, 而不是数据常常在错误的顺序里这样一个事实。在精确度方面一个直观的、完美的解决方案是按时间顺序储存全部输入,然后当OOSM接收到 以后,重新处理所有数据。尽管给出了最优解,但无论是在运算还是在存储需求上都要求过高。Black
51、man和Popoli151以及Hilton等152提出一种近似的解决办法,称之为“算法B”。 Bar-Shalom153后来作了延伸,用最优输出建立了一个算法“算法A”。然而,所有这些算法都假 设OOSM的滞后少于一个步长。Bar-Shalom153也证明了算法B是近最优的。自此以后,有许多人尝试改进算法以对任意滞后都适用154,155,156Bar-Shalom等157, 158 不仅这些算法在计算负担和存储需求方面都开销大,而且提出了一个新的方法在处理单个步骤 中利用OOSM,计算类似于标准的Kalman滤波。对算法A和算法B两者做调整。新的任意的滞后 算法分别叫做“A1”和“B1”。尽管
52、A1的结果是是最优的,处理时间却非常高。B1是可取的,因为相 对算法A的结果其相当快。Hong等近来改进多速率IMM(MRIMM)算法70在OOSM问题上159,160,161工作。多 速率滤波器的实质是把自己借给OOSM的合并,因为它同时提供高效的状态估计追溯的处理结构和 高效存储历史信息的存储结构。其它算法比如IMM162和163多假设跟踪也已经被改进使得集群跟 踪或处理OOSM时用演习目标变得有效。所有这些方法都是基于Kalman滤波的,用粒子滤波不会起到帮助作用,因为必要的计算负担 用他们是不可能的。早期尝试解决OOSM问题都集中在在OOSM时间内重新生成概率密度函数 153。在粒子滤
53、波中,这将会需要相当多的计算资源。为了避免这个难题,Orton和Marrs164在 每一步存储粒子的分布以避免重新计算它们。后来证明,当延迟增加,这种方法的结果只是轻微的 变坏,仍然接近于最优1165。不幸的是,文166说明这样将会需要一个不合理的存储来保持每次更 新的每个数据点的状态,该文并且描述了一个高效的方法像基于Kalman滤波的方法一样追溯状态。值得注意的是,文166描述了基于Kalman滤波的方法性能是相似的,尽管比基于EKF的稍微 差点。Mallick和Marrs写了一个基于KF和基于EKF的OOSM滤波器的综合比较167,发现线性 度量模型OOSMKF算法得到最优的结果。数值结
54、果显示,OOSMKF算法是次最优的。非线性 GMTI雷达数据的实验显示,OOSMPKF和OOSMPF的状态估计的偏好误差是小的并且可比较的。 证明对小的滞后和过程噪声的小值,OOSMKF可以与OOSMPF相比较。OOSM不仅仅是度量融合的问题。Challa等168他们也会影响跟踪到跟踪(track-to-track)融 合,提出了一个增加状态kalman滤波器(augmented state KF, AS-KF)。这是一个kalman滤波不 仅处理当前状态而且同时处理先前状态。当一个轨迹到达,进入计算的度量得到并用来更新算法, 允许处理序列轨迹。Challa等168证明这会提高性能,为了补充A
55、S-KF,文169建立了一个提高 的状态概率数据融合(augmented state probabilistic data association, AS-PDA)算法来处理集群 中的OOSM。6.2数据相关性Kalman滤波的一个问题是它需要要么是独立的测量,要么是跨协方差(crosscovariance)已 知。一个普遍的简化是假设跨协方差是零,但在这种情况下,KF得到非守恒的协方差。这导致了人 为的高置信度值,从而导致滤波器出现差异170。最优的基于KF的办法是KF在更新之间保持跨 协方差171,172,173,174,175。但是,这个解决方案与更新数目成平方比例,因此是不切实际的 1
56、76。考虑正确的跨协方差并不能改善结果,即使它降低假关联率177。分布式传感器环境的轨迹之间相关性的一个普遍的原因是数据相关或谣言传播,数据相关是原 始度量不经意的使用多次。这要么是由于从其他传感器到融合结点采取几个不同路径的相同信息, 要么是循环路径(其中信息从一个融合结点的输出到输入重新传播178)。例子显示在图2。图2的例子是非常简单的,当传感器数量和度量数量增加时,数据相关性就变得难于鉴定和纠正。致数据相关躇据流数据相关性开始看来是不重要,可以避免,但对于融合,最简单的通信方法是发送所有的原始 度量。这就要求对源泉不进行处理,而对目的地进行相对的直接处理。只要存放哪一个轨迹更新的 记录
57、被使用,可以避免相关。这一解决方案不幸被证明是不切实际的,因为它不能很好缩放(scale) 179,从此就无人问津了。相关经常在定位算法中导致状态估计的偏好研究。然而,它也可能不经意的影响鉴定的数据融 合。JDL模型的更高层,相关可能有难捉摸的暗示。举例来说,如果一个传感器被部署在一个区域 以确认目标的描述,然后寻找这样一个物体的先验知识必须相对应的修改,或者当匹配对象被发现 时鉴定中的置信度。度量重建180,181是一种能够用在全局融合结点的方法。其比较接受的远程估计与自身版本 的全局估计。然后有可能是重建导致估计改变到另一估计的度量。这样就可以重新找到远程度量, 并在本地融合算法中使用。这
58、一技术被扩展182到集群里的目标跟踪,把JPDA合并到该方法,然 后进一步把多传感器183和非高斯误差分布包括到与高斯混合模式184 中。McLaughlin等185,186对于分布式的体系结构提出一种数据相关消除策略。算法利用其他 结点的估计解决他们的远程度量。它存储远程度量并且用度量来更新自己的状态估计;这样在数据 融合之前相关已经消除了。由于估算跨协方差计算开销大,Julier和Uuhlmann提出协方差交集(CI)算法187。这是基于这 样一个简单前提:如果两个联立估计的协方差的被视为重叠的椭圆,那么希望作为结果的协方差将 会是两个椭圆的交集周围最小的椭圆(见图3)。这样同一数据可能向
59、过滤器提交若干次,协方差 将不会减小,也就不能提供新鲜的信息。Julier和Uuhlmann187也说明了 CI算法可以在环形的估 计的网络工作组工作。这一点很重要,因为188说明对于KF是不可能的。Input eIleses KJ resultnum ciresuii图3协方差父集Arambel等189比较了 CI和KF的使用,他们用两个算法使飞船按严格的队形饶轨道飞行已进 行干涉。四个飞船将会把光反射到第五艘飞船,而第五艘飞船将会把度量转换成干涉检测。为此, 队形的精确度需在0.1m和0.3毫弧度范围之内。飞船估计另一个的位置,在一个环行网络里把信息 传递到另一艘飞船。这导致正在融合的值之
60、间的跨协方差。每条船一组卡尔曼滤波器来估计整个网 络的状态。数据要么通过读传感器更新,要么在环行网络中其前一个飞船的所有位置估计来更新。 选择的解决办法是,对从有机传感器接受到的数据使用Kalman滤波,对无机度量使用协方差交集 (CI)算法。这防止了数据的跨协方差和过滤器分离。Hurley190对于CI方法给出了其信息理论的证明,并指出CI能够融合任意概率密度函数,而 不只是高斯分布的。他还指出,尽管CI能极好的密度融合,如果需要度量融合的话,那么更为传统 的融合方法可能会适合。协方差相交通过联立的两个协方差的权重平均来工作。该权是一个单个值、,其按照如下的方 式用来联立协方差和:、:、TC
61、hen等191说明,当联立的两个 协方差是N维向量时,权将会是N维向量。而CI对于可能的值只搜索一维曲线。然而,192发现 CI可以找到最优值。这提供了协方差相交问题的形式化的的证明,对于联立的协方差寻找一个上界。 文章同时说明了,CI进行N维优化而只搜索一维空间,这是一个非常有效的算法。寻找权重值是CI中计算最复杂的过程。为了降低该算法的计算开销,193次优的非迭代算 法来寻找。CI解决相关性的输入这个问题,但是对不一致的输入却没有定义。为了解决这个问题,Uhlmann 提出了协方差并集(Covariance Union, CU) 194。通过计算马氏距离(MD)可以检测出不一致的输 入。如
62、果MD超过一个阈值,那么该并集而不是协方差的交集将会被使用Uhlmann194还说明了 这种方法也能排斥异常。CI是悲观的,椭圆比需要的要大;这恰好是EKF的反面。最大椭球算法195避免了这样一个 问题,其建立一个最大的椭圆来在协方差的交集范围内匹配(图4)。这通常比CI算法乐观。Input ellipses KF resultI I I f I 11 LE result图4最大椭球Kalman滤波器是最优的,假设数据是从独立源得到的。如果相关性信息丢失或不完整,那么结 果将会是一个不一致的估计。协方差交集避免了这样的尴尬,但是其保守的估计会降低性能。最大 椭球带来更紧的估计,因为它低估而不是
63、高估了协方差,尽管比KF低估的要低,所以过滤器分离 仍然可以避免。7结论本文概述了分布式数据融合的方法。该讨论是以著名的JDL数据融合框架为基础。多传感器数 据融合是一个活跃的研究领域,横跨了许多传统的研究领域:工业控制、自主机器人、军事跟踪。许多工作都集中在JDL框架的第1层“数据提炼”,包括了数据注册、数据关联、位置属性估计 和鉴定。其他三层在文献中覆盖的就比较少。可能是因为高层需要以第一层作为基础。既然坚实的 理论基础已经奠定,这方面的工作已经起步,但是还需要许多年才能赶上第1层的工作广度。本文除了概括了当前的方法,还讨论了有选择的数据融合的剩余挑战。大多数第1层的数据融 合研究(上一个十年已经解决了)已经把重心集中使用多分布式的传感器所带来的问题上。尽管许 多人已经写了关于这方面的文章,但是许多问题仍然完全被解决。举例来说,对于无序度量(OOSM) 的问题存在很多解决方法,但是只集中在经过很少扫描次数的无序度量上。精确的利用任意时期的 度量仍然是难以理解的。协方差交交集经常被看成是数据融合中的跨协方差问题的万能药。然而, 在粒子滤波器中或者在目标识别中仍然没有解决这个问题,而且对联立数据提供了悲观的结果。我 们期待未来的研究将会提出一些挑
- 温馨提示:
1: 本站所有资源如无特殊说明,都需要本地电脑安装OFFICE2007和PDF阅读器。图纸软件为CAD,CAXA,PROE,UG,SolidWorks等.压缩文件请下载最新的WinRAR软件解压。
2: 本站的文档不包含任何第三方提供的附件图纸等,如果需要附件,请联系上传者。文件的所有权益归上传用户所有。
3.本站RAR压缩包中若带图纸,网页内容里面会有图纸预览,若没有图纸预览就没有图纸。
4. 未经权益所有人同意不得将文件中的内容挪作商业或盈利用途。
5. 装配图网仅提供信息存储空间,仅对用户上传内容的表现方式做保护处理,对用户上传分享的文档内容本身不做任何修改或编辑,并不能对任何下载内容负责。
6. 下载文件中如有侵权或不适当内容,请与我们联系,我们立即纠正。
7. 本站不保证下载资源的准确性、安全性和完整性, 同时也不承担用户因使用这些下载资源对自己和他人造成任何形式的伤害或损失。
最新文档
- 高中物理-第3章-专题-弹力摩擦力综合问题及物体的受力分析ppt课件-新人教版必修1
- 高中英语外研版选修六ppt课件:Module+2+Section+Ⅰ+Introduction+&+Reading+—+Pre-reading
- 高中英语外研版必修三ppt课件:Module+4+Section+Ⅴ+Writing—+环保类作文
- 高中英语必修4-Unit-2-Working-the-landppt课件
- 《高等石油地质》复习资料--课件
- 高中英语人教选修6ppt课件:Unit-3-Section-Ⅱ
- 高中信息技术基础《初识冒泡排序》优质课教学ppt课件
- 高中议论文语段训练修改ppt课件
- 高中英语必修五人教版ppt课件:Unit-3-Period-Three
- 党课ppt课件信仰的力量精编版
- 蔬果变变变课件
- 中央空调系统构成和设备配置课件
- 促进身心健康课件-人教课标版
- 传出神经系统药理---课件
- 一年级数学10的分与合课件
