 全站仪测高程新方法
全站仪测高程新方法

《全站仪测高程新方法》由会员分享,可在线阅读,更多相关《全站仪测高程新方法(8页珍藏版)》请在装配图网上搜索。
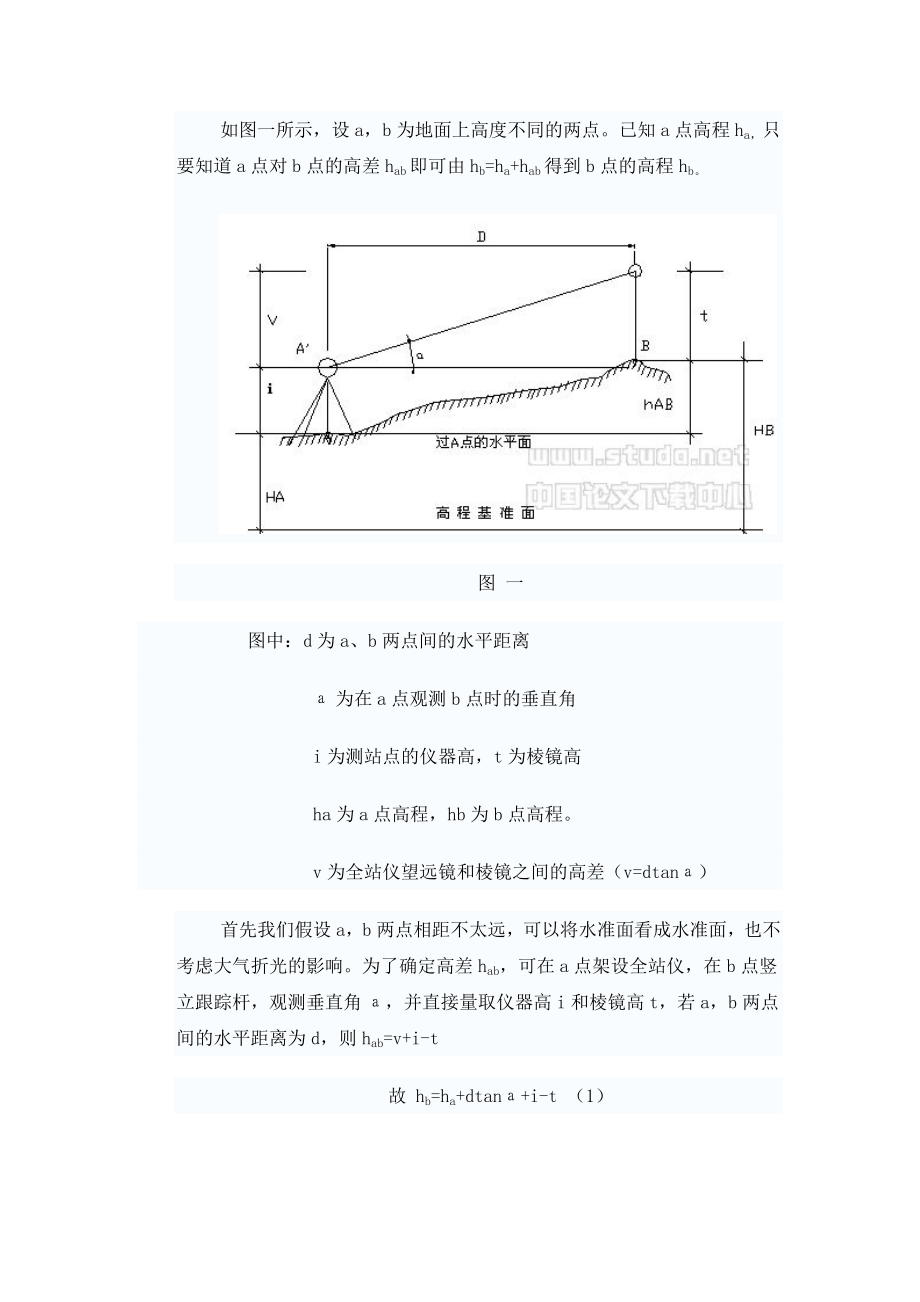
1、如图一所示,设a,b为地面上高度不同的两点。已知a点高程ha,只要知道a点对b点的高差hab即可由hb=ha+hab得到b点的高程hb。图 一图中:d为a、b两点间的水平距离为在a点观测b点时的垂直角i为测站点的仪器高,t为棱镜高ha为a点高程,hb为b点高程。v为全站仪望远镜和棱镜之间的高差(v=dtan)首先我们假设a,b两点相距不太远,可以将水准面看成水准面,也不考虑大气折光的影响。为了确定高差hab,可在a点架设全站仪,在b点竖立跟踪杆,观测垂直角,并直接量取仪器高i和棱镜高t,若a,b两点间的水平距离为d,则hab=v+i-t故 hb=ha+dtan+i-t (1)这就是三角高程测量
2、的基本公式,但它是以水平面为基准面和视线成直线为前提的。因此,只有当a,b两点间的距离很短时,才比较准确。当a,b两点距离较远时,就必须考虑地球弯曲和大气折光的影响了。这里不叙述如何进行球差和气差的改正,只就三角高程测量新法的一般原理进行阐述。我们从传统的三角高程测量方法中我们可以看出,它具备以下两个特点:1、 全站仪必须架设在已知高程点上2、 要测出待测点的高程,必须量取仪器高和棱镜高。二、三角高程测量的新方法 如图一所示,设a,b为地面上高度不同的两点。已知a点高程ha,只要知道a点对b点的高差hab即可由hb=ha+hab得到b点的高程hb。图 一图中:d为a、b两点间的水平距离为在a点
3、观测b点时的垂直角i为测站点的仪器高,t为棱镜高ha为a点高程,hb为b点高程。v为全站仪望远镜和棱镜之间的高差(v=dtan)首先我们假设a,b两点相距不太远,可以将水准面看成水准面,也不考虑大气折光的影响。为了确定高差hab,可在a点架设全站仪,在b点竖立跟踪杆,观测垂直角,并直接量取仪器高i和棱镜高t,若a,b两点间的水平距离为d,则hab=v+i-t故 hb=ha+dtan+i-t (1)这就是三角高程测量的基本公式,但它是以水平面为基准面和视线成直线为前提的。因此,只有当a,b两点间的距离很短时,才比较准确。当a,b两点距离较远时,就必须考虑地球弯曲和大气折光的影响了。这里不叙述如何
4、进行球差和气差的改正,只就三角高程测量新法的一般原理进行阐述。我们从传统的三角高程测量方法中我们可以看出,它具备以下两个特点:1、 全站仪必须架设在已知高程点上2、 要测出待测点的高程,必须量取仪器高和棱镜高。: 1 二、三角高程测量的新方法 为测站中设定的测站点高程d为测站点到待测点的水平距离为测站点到待测点的观测垂直角从(4)可知,不同待测点的高程随着测站点到其的水平距离或观测垂直角的变化而改变。将(3)代入(4)可知:hb=ha+i-t+dtan (5)按三角高程测量原理可知hb=w+dtan+i-t (6)将(3)代入(6)可知:hb=ha+i-t+dtan+i-t (7)这里i,t为
5、0,所以:hb=ha+i-t+dtan (8)由(5),(8)可知,两种方法测出的待测点高程在理论上是一致的。也就是说我们采取这种方法进行三角高程测量是正确的。综上所述:将全站仪任一置点,同时不量取仪器高,棱镜高。仍然可以测出待测点的高程。测出的结果从理论上分析比传统的三角高程测量精度更高,因为它减少了误差来源。整个过程不必用钢尺量取仪器高,棱镜高,也就减少了这方面造成的误差。同时需要指出的是,在实际测量中,棱镜高还可以根据实际情况改变,只要记录下相对于初值t增大或减小的数值,就可在测量的基础上计算出待测点的实际高程。在建筑施工中,高程测量的传统方法有水准测量、三角高程测量等。两种方法各有利弊
6、,水准测量是一种直接测量高程的方法,测量高差的精度较高,但受地地形起伏的影响大,转站多,且施测速度慢。传统三角高程测量是一种间接测量高程法,它不受地形起伏的限制,施测速度较快,但精度较低,且每次测量都得量取仪器高,棱镜高,测量工序繁琐,且相应增加了误差来源。随着全站仪的广泛使用,使用棱镜跟踪杆配合全站仪测量高程的方法越来越受到广大测量人员青睐,经过在我公司F2大厦工程中实践与检验,全站仪三角高程测量法既结合了水准测量的任一置站的特点,又减少了传统三角高程的误差来源,同时每次测量时还不必量取仪器高、棱镜高。使三角高程测量精度进一步提高,施测速度更快。 一、传统三角高程测量 1、传统三角高程测量方
7、法,如图1-1 图1-1 传统三角高程测量示意图 2、传统的三角高程测量计算式 如图1-1中:D为A、B两点间的水平距离(高斯投影平面上两点的距离) 为在A点观测B点时的垂直角 i为测站点的仪器高,t为棱镜高 HA为A点高程,HB为B点高程。 V为全站仪望远镜和棱镜之间的高差(V=Dtan) 设A,B两点相距300m时,图1-1中的大地水准面就不能用水平面来代替了,只能被看作曲面,所计算结果必须考虑地球曲率改正和大气折光改正。同时传统的三角高程测量方法必须满足以下条件: a全站仪必须架设在已知高程点上 b要测出待测点的高程,必须量取仪器高和棱镜高。 二、无量高全站仪三角高程测量法 1、求测点高
8、程H0 测高法 1)如图1-1,假设B点的高程HB已知,A点的高程HA未知,这里要通过全站仪测定其它待测点的高程。由式(1-1)可知: HA= HB- Dtan-i+ t (1-2) 上式Dtan即V值可以用仪器直接测出,i,t都是未知的。但有一点可以确定即仪器一旦置好,i值也将随之不变,同时选取棱镜跟踪杆作为反射棱镜, t值也不变。从式(1-2)可知:待测点的高程为: HA+i-t=HB-Dtan=H0 (1-3) 由式(1-3)可知, HA+i-t在任一测站上也是固定不变的.而且可以计算出它的值H0(H0为测站点高程)。故有 H求= H0+Dtan +i-t (1-4) 当i=0、t=0时
9、 H求= H0+Dtan 注:H求为待测点的高程,H0为测站中设定的测站点高程,D为测站点到待测点的水平距离,为测站点到待测点的观测垂直角 2)求测点高程H0三角高程测量法的操作过程 a将仪器任一置点,所选点位要求与已知高程点通视。 b 将仪器照准已知高程点,测出V的值,并算出H0 的值。(此时与三角高程测定有关的常数:测站点高程,仪器高,棱镜高均为任意值,施测前不必作任何设定。) c将仪器测站点高程重新设定为H0 ,仪器高和棱镜高设置为0即可。 d 照准待测点测出其高程。 2、 借高三维Z坐标测高法 1)借高三维Z坐标测高法原理及公式推导 图2-1 借高三维Z坐标值测高法测量示意图 如图2-
10、1,假设B点的高程HB已知,C点的高程Hc未知,A点为任意置站点,这里要通过全站仪测定C点的高程Hc。由Z坐标测量原理可知: ZB= ZA+Dtan+i- t (2-1) 上式Dtan即V值可以用仪器直接测出,测出V值后将仪器中仪高值i改设为(t-Dtga)值、将测站点ZA坐标设置为基准点高点HB。测量中仪器一旦置好,仪器中的i值也将随之不变,同时选取棱镜跟踪杆作为反射棱镜,其棱镜高 t值任何站都将不变。则有 ZB= ZB+ Dtan+i-t= ZA+Dtan+i-t+ Dtan+ (t-Dtga)-t=ZB (2-2) Zc= ZA+Dtan+i-t=ZB+Dtga+i-t=ZB+Dtga+
11、 (t-Dtga)-t= ZB+Dtga-Dtga (2-3) 2、借高三维Z坐标值测高法的操作过程: a将仪器任一置点,所选点位要求与已知高程点通视。 b 将仪器照准已知基准高程点,测出V值,测出V值后将仪器中仪高值改设为(t-Dtga)值。棱镜高在搬站前始终保持不变 c将测站点Z坐标设置为所视基准点高程值。 d进入坐标测量功能界面,照准待测点测出其Z坐标(高程)。 三、工程验证 现以金融街F2大厦项目水准点复测的一部分数据,来对比水准仪和全站仪两种方法测量结果与过程。如图2-2 图2-2 F2大厦工程全站仪三角高程测量示意图 GPS3基准点到GPS4基准点的直线距离1777.159m,高差
12、 0.562m。 1、利用全站仪测量5站闭和到GPS4点,利用水准仪则转12次转站。 点号 V1(Dtga) V2(Dtga) D(m) H(m) 备注 GPS3 -0.312 334.123 49.485 Z1 0.125 0.532 318.59 50.329 Z2 0.103 0.536 359.886 50.74 Z3 0.325 -1 358.698 49.637 Z4 0.186 -0.325 289.875 48.987 GPS4 0.123 315.987 48.924 闭和差: f=48.924-48.921=0.003 m 满足四等水准测量要求. 2、用水准仪测量 点号 后
13、视D(m) 后视 (中丝) 前视 (中丝) 前视D(m) 高程(m) GPS3 58.863 1.252 49.485 Z1 60.112 0.19 1.409 60.123 49.328 Z2 70.005 0.192 1.445 69.158 48.073 Z3 60.157 0.127 1.395 68.999 46.87 Z4 68.985 1.022 0.912 65.1 46.085 Z5 69.990 1.029 0.23 60.1 46.877 Z6 60.331 1.111 0.121 60.002 47.785 Z7 65.900 1.245 1.02 60 47.876
14、Z8 69.95 0.863 1.035 60.23 48.086 Z9 65.123 1.395 1.08 60.185 47.869 Z10 60.003 1.353 1.152 66.125 48.112 Z11 60.155 1.415 1.14 65.55 48.325 GPS4 0.813 70.005 48.927 闭和差: f=48.927-48.921=0.006m 满足四等水准测量要求. 在施工测量中,常常涉及到高程测量,传统的测量方法是水准测量与三角高程测量。两种测量方法各具特色,但都存在不足。水准测量是一种直接测高法,测定高差的精度高,但其受地形起伏的限制,外业工作量大
15、,施测速度慢;三角高程测量是一种间接测高法,它不受地形起伏的限制,且施测速度较快,在大比例地形图测绘、线型工程、管网工程等工程测量中应用广泛。但传统的三角高程测量也有其不足之处,即在每一站都需要量取仪器高和读取棱镜高,不但麻烦,而且增加了误差来源,降低了高差测定的精度。笔者在日常工作实践当中经过不断推导论证,总结出一种比传统的三角高程测量更为简易的方法。这种方法既结合了水准测量的任意置站的优点,又不必量取仪器高和读取棱镜高,大大减少了三角高程测量的误差来源,使三角高程测量精度进一步提高,施测起来更加快速简便。下面通过对传统的三角高程测量和简易的三角高程测量进行的对比分析,说明三角高程测量简易方
16、法的优越性。 三角高程测量的传统方法A与为地面上高度不同的两点,已知A点高程A,只要知道A点对点的高差A,即可由A,得到点的高程。首先,我们假设,两点相距不太远,可以将水准面看成水平面,也不考虑大气折光的影响和地球曲率的影响。为了确定,两点的高差,可在点架设全站仪,在点竖立棱镜,直接量取仪器高,读取棱镜高,观测垂直角,水平距离,则,故, 式中,为点的高程;为点的高程;为仪器高;为棱镜高;为全站仪望远镜和棱镜之间的高差(),这就是三角高程测量的基本公式。但它是以水平面为基准面和视线成直线为前提的。因此,只有当,两点间的距离较短时,才比较准确。当,两点间距离较远时,就须考虑地球曲率影响和大气折光的
17、影响了。这里只就三角高程测量的简易方法进行阐述论证。我们从传统的三角高程测量方法中可以看出,它具备以下两个特点:一是全站仪须架设在已知高程点上;二是要测出待测点的高程,必须量取仪器高和读取棱镜高。 三角高程测量的简易方法如果我们能将全站仪像水准仪一样任意置点,而不是将它安置在已知高程点上,同时在不量取仪器高和读取棱镜高的情况下,利用三角高程原理测出待测点的高程,那么施测的速度将更快。下面来介绍一下它的操作过程并分析论证它的正确性。如图所示:为,两点的水平距离;为在点观测点时的垂直角;为测站点的仪器高;为棱镜高;为点高程;为点高程;为全站仪望远镜和棱镜之间的高差()。由图可知: ()上式除了()
18、的值可以用仪器直接测出,是未知的,仪器一旦置好,值也将随之不变,值可由反射棱镜杆读取,但我们不必读取,假定值也固定不变,从()式可得: ()由()式可知,基于上面的假设,在任一测站上也是固定不变的,而且可以计算出它的值。下面介绍一下操作过程:首先,将仪器置任一点,但要求能和已知高程点通视。其次,用仪器照准已知高程点,测出的值,并算出的值(此时与仪器高程测定有关的常数如测站点高程、仪器高、棱镜高均为任一值,施测前不必设定)。第三,将仪器测站点高程重新设定为,仪器高和棱镜高设为。第四,照准待测点测出其高程。下面分析一下这种方法的正确性。结合()式与()式,可得: ()式中:为待测点的高程;为测站中
19、设定的测站点高程;为测站点到待测点的水平距离;为测站点到待测点的观测垂直角。从()式可知,不同待测点的高程随测站点到其的水平距离和观测垂直角的变化而变化。将()代入()可得: ()按三角高程测量原理可知: ()将()代入()可得: ()这里与为,所以 ()由()式与()式可知,两种方法测出的待测点高程在理论上是一致的,这就说明我们用这种方法进行三角高程测量是正确的。这里须说明一下,当与,与两点之间距离较远时,必须考虑地球弯曲和大气折光的影响,同时仪器的垂直角不能太大(一般不超过),否则也会影响三角高程测量的精度。还有一点需要特别指出的是,在实际测量中,棱镜高还可以根据实际情况改变,只要记录下相对于初值增大或减小的数值,就可在测量的基础上计算出待测点的实际高程。
- 温馨提示:
1: 本站所有资源如无特殊说明,都需要本地电脑安装OFFICE2007和PDF阅读器。图纸软件为CAD,CAXA,PROE,UG,SolidWorks等.压缩文件请下载最新的WinRAR软件解压。
2: 本站的文档不包含任何第三方提供的附件图纸等,如果需要附件,请联系上传者。文件的所有权益归上传用户所有。
3.本站RAR压缩包中若带图纸,网页内容里面会有图纸预览,若没有图纸预览就没有图纸。
4. 未经权益所有人同意不得将文件中的内容挪作商业或盈利用途。
5. 装配图网仅提供信息存储空间,仅对用户上传内容的表现方式做保护处理,对用户上传分享的文档内容本身不做任何修改或编辑,并不能对任何下载内容负责。
6. 下载文件中如有侵权或不适当内容,请与我们联系,我们立即纠正。
7. 本站不保证下载资源的准确性、安全性和完整性, 同时也不承担用户因使用这些下载资源对自己和他人造成任何形式的伤害或损失。
