 监督分类和非监督分类
监督分类和非监督分类

《监督分类和非监督分类》由会员分享,可在线阅读,更多相关《监督分类和非监督分类(22页珍藏版)》请在装配图网上搜索。
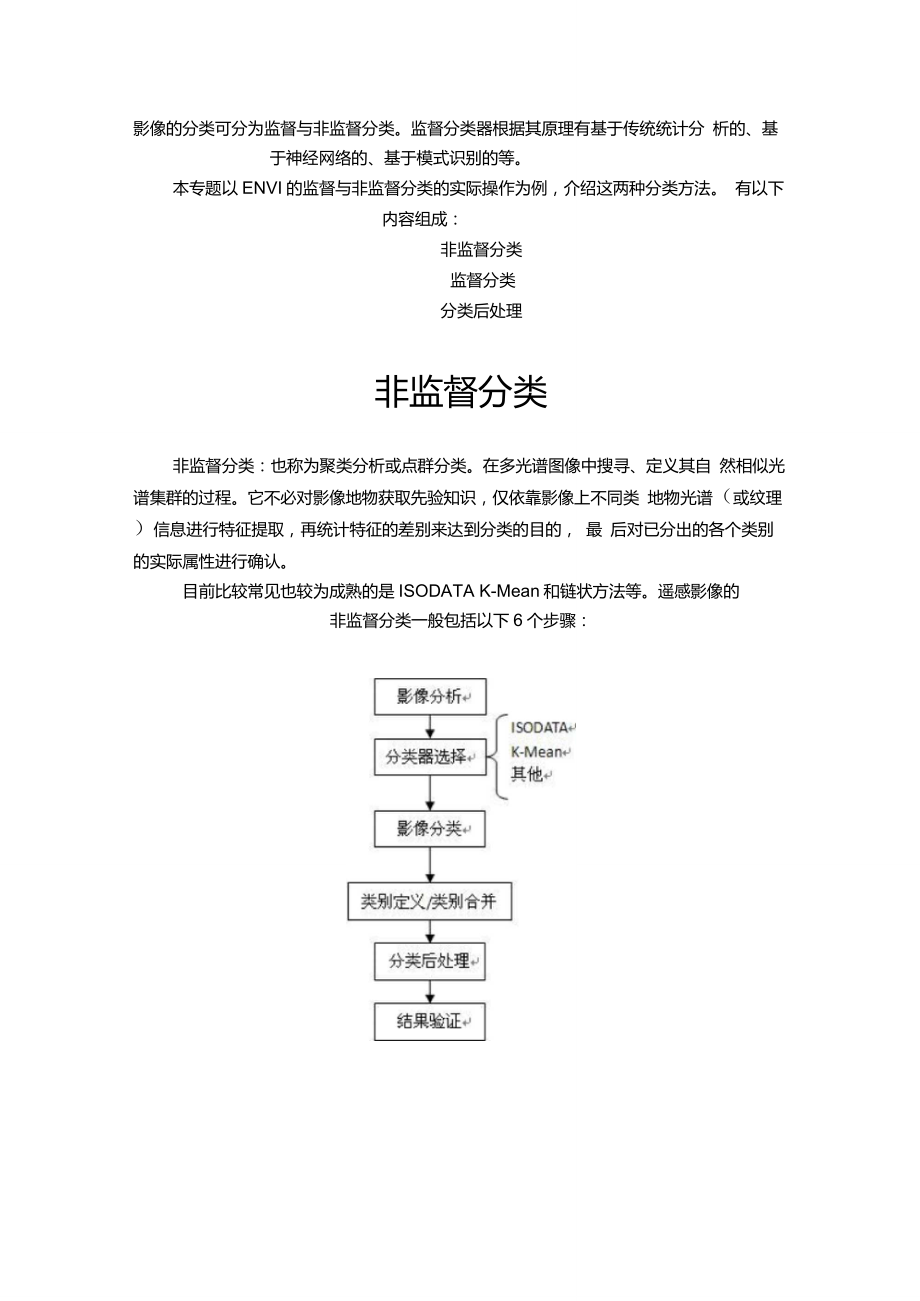
1、影像的分类可分为监督与非监督分类。监督分类器根据其原理有基于传统统计分 析的、基于神经网络的、基于模式识别的等。本专题以ENVI的监督与非监督分类的实际操作为例,介绍这两种分类方法。 有以下内容组成:非监督分类监督分类分类后处理非监督分类非监督分类:也称为聚类分析或点群分类。在多光谱图像中搜寻、定义其自 然相似光谱集群的过程。它不必对影像地物获取先验知识,仅依靠影像上不同类 地物光谱(或纹理)信息进行特征提取,再统计特征的差别来达到分类的目的, 最 后对已分出的各个类别的实际属性进行确认。目前比较常见也较为成熟的是ISODATA K-Mean和链状方法等。遥感影像的非监督分类一般包括以下6个步
2、骤:图1非监督分类操作流程1、影像分析大体上判断主要地物的类别数量。一般监督分类设置分类数目比最终分类数量要多 2-3 倍为宜,这样有助于提高分类精度。本案例的数据源为ENVI自带的Landsat tm5数据Can_tmr.img,类别分为:林地、 草地/灌木、耕地、裸地、沙地、其他六类。 确定在非监督分类中的类别数为 15。2、分类器选择目前非监督分类器比较常用的是ISODATA K-Mean和链状方法。ENVI包括了 ISODATA和 K-Mean方法。ISODATA(Iterative Self-Orgnizing Data Analysize Techniqu)e 重复自组织数据分析
3、技术,计算数据空间中均匀分布的类均值, 然后用最小距离技术将剩余像元进行 迭代聚合,每次迭代都重新计算均值, 且根据所得的新均值, 对像元进行再分类。 K-Mea ns使用了聚类分析方法,随机地查找聚类簇的聚类相似度相近, 即中心位 置,是利用各聚类中对象的均值所获得一个“中心对象” (引力中心) 来进行计 算的,然后迭代地重新配置他们,完成分类过程。3 、影像分类打开 ENVI,选择主菜单-Classification-Unsupervised-lsoDat或者 K-Means 这里选择IsoData,在选择文件时候,可以设置空间或者光谱裁剪区。这里选择软件自带的Can_tmr.img,按默
4、认设置,之后跳出参数设置,如图2。这里主要设置类别数目( Number of Classes )为 5-15、迭代次数( MaximumIteration )为 10。其他选项按照默认设置,输出文件豐 ISODATA Paraaeters图3 ISODATA分类结果4、类别定义/类别合并1)类别定义在 display 中显示原始影像,在 display-overlay-classification,选择ISODATA分类结果,如图4所示,在In teractive Class Tool 面板中,可以 选择各个分类结果的显示。rECl Alt粗比1匕齐 * 5 11 f I * 1图4影像与分类
5、结果的叠加In teractiveClass Tool 面板中,选择 Option-Edit class colors/names。通过目视或者其他方式识别分类结果,填写相应的类型名称和颜色图5类别定义如图6所示为最终的结果图6类别定义结果在类别定义时候,可以利用 Mode: Polygon Add to Class Edit-Mode: PolygonDelete from Class或者Set delete class value把很明显的错误分类结果并入或者删除。2)类别合并选择主菜单-Classification-Post Classification -Combine Classed
6、同一类的类别合并成一类,如图7所示。在点击ok后,需要选择输出文件和Remove Empty Class选择YES可以得到结果書 Coabine Classes ParaetersSelect irLput Cl ass术地血地地地 林草裸耕沙Select Output QassInput ClassOutput Clz”草地/灌木Add CombinationCombined Classes林地2 -林地HHK3 -秒岖OK Cancel图7类别的合并5、分类后处理分类后处理包括的很多的过程,都是些可选项,包括更改类别颜色、分类统计分析、小斑点处理(类后处理)、栅矢转换等操作。1)更改类别颜
7、色可以在 In teractive Class Tool面板中,选择 Opti on-Edit class colors/names 更 改,也可以在 Display-Color Mapping-Class Color Mapping 如下图 8 所示,直接 可以在对应的类别中修改颜色。也可以根据一个显示的RGB影像来自动分配类别颜色,打开主菜单-Classificati on-Post Classificatio n-Assig n Class Colorsfl Class Color lappjng口叵;区F ile OptionsColor Rec.Green订IBlue图8类别颜色的更
8、改图9类别颜色更改后的效果图10自动颜色更改的效果图2)分类统计分析主菜单-Classificatio n-Post Classificatio n-Class Statistics如图 11 所示,包 括基本统计:类别的像元数、最大最小值、平均值等,直方图,协方差等信息。VStats 7msi7 Covuri uiceCovari ance Tm电益色g Output to the ScreenV Output to a StaFileEnter Output Stats Bootnanne Choose1C: MEMFtm-uii-cOJftb_class2 Output to Text
9、Report File:EnUr Output Report filename . txt ChooseC: TEHFtin-un-cftb_class_rfipt. txtCoaput e St at xst ics Faraaet eraOKQueue CiancelReport Freci si oil 图11分类结果统计3)小斑点处理(类后处理)运用遥感影像分类结果中,不可避免地会产生一些面积很小的图斑。无论从专题制图的角度,还是从实际应用的角度,都有必要对这些小图斑进行剔除和重 新分类,目前常用的方法有 Majority/Minority分析、聚类(clump)和过滤(Sieve)
10、和。这些工具都可以在主菜单-Classification-Post Classification中找到。Majority/Minority分析和聚类(clump)是将周围的“小斑点”合并到大类当中,过滤(Sieve)是将不符合的“小斑点”直接剔除。如下图12为Majority分析的结果图12类后处理结果图4)栅矢转换打开主菜单-Classification-Post Classification-Classification to Vector可以将分类后得到的结果转化为矢量格式,或者主菜单-Vector-Raster to Vector在选择输出参数时候,可以选择特定的类别,也可以把类别单独
11、输出为矢量文件或者一个矢量文件。Rastei To ector PaiaetersSelect ClasgS to Vectcri le :类 底分H地地地地地 盂苴林車#耕沙Number o i t&nhE selected:占elect All Tt色血gClu- All ItemsOutput piiigl* LayerOutput Result to r+ File C MemoryEnt er Output Fileii&me . evf Choose |C: XTEIUpVlm-iinclaEE. ev7OK Cancel图13栅矢转换面板6、结果验证对分类结果进行评价,确定分类的
12、精度和可靠性。有两种方式用于精度验证: 是混淆矩阵,二是ROC曲线,比较常用的为混淆矩阵,ROC曲线可以用图形 的方式表达分类精度,比较形象。是标准的分类图,二是选择的感兴趣区(验证样本区)。两种方式的选择都可以通过主菜单-Classificatio n-PostClassification-Confusion Matrix或者 ROC Curves来选择。真实的感兴趣区参考源的选择可以是在高分辨率影像上选择,也可以是野外实地调查获取,原则是获取的类别参考源的真实性。由于没有更高分辨率的数据源, 本例中就把原分类的TM影像当作是高分辨率影像,在上面进行目视解译得到真 实参考源。直接利用ROI工
13、具,在TM图上均匀的选择6类真实参考源,如图13 所示。选择主菜单-Classification-Post Classification-Confusion Matrix-Using Ground Truth ROIs将分类结果和ROI输入,软件会根据区域自动匹配,如不正 确可以手动更改。点击ok后选择报表的表示方法(像素和百分比),就可以得 到精度报表。TiuIjhi 厂 L瞽厂 Scroll百2 AMrioliF*13T-3 2536.750.000.000.00 100.QQso0737020rio o B 9 6 0 5 0 ttoo-2140002 7 Q1操地0.000.0DG.D
14、O0.0052.620.007.381QD.DO供地0 00 o.oo0 . QU0 . 430 .00 9$ .350.22 100 00嶷勉也权也也也11沖也也机也也也 TI 韦 1J u a11- 分苴林谁暮沙otla耳林谨課袂沙 WE / T C / 伶井 也 也 口 5! 如Giound Truth 沙她 0.00 Q.QD 0.00 0.00 0.00 0.00 100.0Q 100.00CeunmLStiBftJo 3 0 9 0 3 t nu 3 fl 2 o n_ fl I -. 6045604(Percent)Total0.0012.151 -J As nJ -u8 2 5
15、 6 5 01 D 3 a? 2 o113 110U!l.lSlOn(Percent)5 5 7 8 5 03 7 0-360 o & B 7 D oudJkhiMtan(Pixels)D/2B512/277 15S4Q 286Z7B90Z4 624必94OjiilEEltJlL (F1KS1S) 1/266 15(/419 29W3 40ZS42 3/465 0/251他地木地地地X楙灌課報沙/I.草-)5 5 3 2 5 c t 2 9 6 3oJgffr Jtcc(Percent)100 . 00 $.67 35.00 63.711CD.Q085.37Prod Agc.(Pixsls)2
16、B5Z2B6 265415&4/333S02/5424G2Z4652S1Z251User Ace(PilfBls) 28E/285 26S/277 84/240 50276& 462/46? 251/294图16分类精度评价混淆矩阵这里说明一下混淆矩阵中的几项评价指标,如下:总体分类精度等于被正确分类的像元总和除以总像元数。被正确分类的像元数目沿着混淆 矩阵的对角线分布,总像元数等于所有真实参考源的像元总数,如本次精度分类精度表中的 Overall Accuracy = (1849/2346)78.8150%Kappa系数它是通过把所有真实参考的像元总数(N)乘以混淆矩阵对角线(XKK的和,再
17、减去某一类中真实参考像元数与该类中被分类像元总数之积之后,再除以像元总数的平方减去某一类中真实参考像元总数与该类中被分类像元总数之积对所有类别求和的结果。1Kappa计曽公式错分误差指被分为用户感兴趣的类,而实际属于另一类的像元,它显示在混淆矩阵里 面。本例中,林地有419个真实参考像元,其中正确分类265, 12个是其他类别 错分为林地(混淆矩阵中林地一行其他类的总和),那么其错分误差为 12/419=2.9%漏分误差指本身属于地表真实分类,当没有被分类器分到相应类别中的像元数。如在本例中的耕地类,有真实参考像元465个,其中462个正确分类,其余3个被错 分为其余类(混淆矩阵中耕地类中一列
18、里其他类的总和),漏分误差为3/465=0.6% 制图精度是指分类器将整个影像的像元正确分为 A类的像元数(对角线值)与 A类 真实参考总数(混淆矩阵中A类列的总和)的比率。如本例中林地有419个真实 参考像元,其中265个正确分类,因此林地的制图精度是 265/419=63.25%。用户精度是指正确分到A类的像元总数(对角线值)与分类器将整个影像的像元分为 A类的像元总数(混淆矩阵中 A类行的总和)比率。如本例中林地有 265个正确 分类,总共划分为林地的有277,所以林地的用户精度是265/277=95.67%。 监督分类监督分类监督分类:又称训练分类法,用被确认类别的样本像元去识别其他未
19、知类别像元的过程。 它就是在分类之前通过目视判读和野外调查,对遥感图像上某些样区中影像地物的类别属 性有了先验知识,对每一种类别选取一定数量的训练样本,计算机计算每种训练样区的统 计或其他信息,同时用这些种子类别对判决函数进行训练,使其符合于对各种子类别分类 的要求,随后用训练好的判决函数去对其他待分数据进行分类。使每个像元和训练样本作 比较,按不同的规则将其划分到和其最相似的样本类,以此完成对整个图像的分类。遥感影像的监督分类一般包括以下6个步骤,如图17所示:图17监督分类步骤1、类别定义/特征判别根据分类目的、影像数据自身的特征和分类区收集的信息确定分类系统;对影像进行特 征判断,评价图
20、像质量,决定是否需要进行影像增强等预处理。这个过程主要是一个目视 查看的过程,为后面样本的选择打下基础。本例是以ENVI自带Landsat tm5数据Can_tmr.img为数据源,类别分为:林地、草地/灌木、 耕地、裸地、沙地、其他六类。2、样本选择为了建立分类函数,需要对每一类别选取一定数目的样本,在ENVI中是通过感兴趣区(ROIs )来确定,也可以将矢量文件转化为ROIs文件来获得,或者利用终端像元收集器(En dmember Collect ion )获得。本例中使用 ROIs方法,打开分类图像,在 Display-Overlay-Region of Interest,默认ROIs
21、为多边形,按照默认设置在影像上定义训练样本。如图18所示,设置好颜色和类别名称 (支持中文名称)。在ROIs面板中,选择Option-Compute ROI Separability,计算样本的可分离性。 如图19所示, 表示各个样本类型之间的可分离性,用Jeffries-Matusita, Tran sformed Diverge nee 参数表示,这两个参数的值在 02.0之间,大于1.9说明样本之间可分离性好,属于合格样本;小于1.8,需要重新选择样本;小于 1,考虑将两类样本合成一类样本。Irfl*1 RM Tool miUM L 丘轉. 广Sft之1百Z*w 广也代MilGf cij
22、TJJMT2Ijf 应戦和戴fltiM, *+ti訝zgHn3K和班那WJTj附工Mm lh:lfel!E FftlvgOJllVrx斤忖W鈕A皆StiHPfrtru.i. I|Siltfl U1Ki 斯 SJIi |I图18训练样本的选择电1 KOI Separability ReportFilt也怛也怛也 1J LJ n 4 JttM 材楼葺沙X心也也fefcte 匸 1J_ 1 1J1J. .LTGreeH31 972 points : ost);林地【gfftti? 972 points住地/j#木Green2 92 points - 1.GSS24715GreeiiS 972 poi
23、nts 其他Black J 373 points - 1 87547731 Gr&enl 772 points Ad 華地产膽木Greh2 962 p&ints - 1 9O9&6.747 SiennA 2421 points And 淨地 White 365 points - 1.1630123 Greenl 772 pnibts 吉讹碟地iab.n&2 2421 poL&ts - l4%602&9S Groen3 972 points dud 枫迪Green 1 772 points - 1 77419351 抄壕 Vhxtdi 365 points - 1 9792&2&;Greei3
24、972 points- and 操地 rSxen.na2 2421 pokn.ts - 1 . 9S922&1 j:Sienufi? 2121 paints and 站施Black 373 points- 1 3361233;Greenl1772pointsand沙iftUhiteJpoints1 . 9 9B0170;Greeul 772paints占ndjt 他i H丄wc:li j373poinls-1 . 3 9$BS4S;GreaniS 972points-andUkite35points-1.99999899Oi te 365 points and JC他,Black 373 po
25、ints - 2 . 0000000篁地Green2 32 points and 揀庖Sie&nA2 2421 points - 1 S3292744 林地Wife 婷世林地十. 草也/灌 択 Gi*een2 9fc? points and P_ . *十 _ , _ _ . . ”章也广魁本 GreenS 9&? points and 葛地Black 373 points - 1 6732&53 林地裸地 哄地 秩地 林地 沙地图19样本可分离性计算报表3、分类器选择根据分类的复杂度、精度需求等确定哪一种分类器。目前监督分类可分为基于传统统计 分析学的,包括平行六面体、最小距离、马氏距离、最
26、大似然,基于神经网络的,基于模 式识别,包括支持向量机、模糊分类等,针对高光谱有波谱角(SAM),光谱信息散度,进制编码。下面是几种分类器的简单描述。I平行六面体根据训练样本的亮度值形成一个n维的平行六面体数据空间,其他像元的光谱值如果落在平行六面体任何一个训练样本所对应的区域,就被划分其对应的类别中。I最小距离利用训练样本数据计算出每一类的均值向量和标准差向量,然后以均值向量作为该类在 特征空间中的中心位置,计算输入图像中每个像元到各类中心的距离,到哪一类中心的距 离最小,该像元就归入到哪一类。I马氏距离计算输入图像到各训练样本的协方差距离(一种有效的计算两个未知样本集的相似度的 方法),最
27、终技术协方差距离最小的,即为此类别。I最大似然假设每一个波段的每一类统计都呈正态分布,计算给定像元属于某一训练样本的似然 度,像元最终被归并到似然度最大的一类当中。I神经网络指用计算机模拟人脑的结构,用许多小的处理单元模拟生物的神经元,用算法实现人脑 的识别、记忆、思考过程。I支持向量机支持向量机分类 (Support Vector Machine或SVM)是一种建立在统计学习理论(StatisticalLearning Theory或SLT)基础上的机器学习方法。SVM可以自动寻找那些对分类有较大区分能力的支持向量,由此构造出分类器,可以将类与类之间的间隔最大化,因而有较好的 推广性和较高的
28、分类准确率。I波谱角它是在N维空间将像元与参照波谱进行匹配,通过计算波谱间的相似度,之后对波谱之间相似度进行角度的对比,较小的角度表示更大的相似度。4、影像分类基于传统统计分析的分类方法参数设置比较简单,这里选择支持向量机分类方法。主菜单下选择 Classification Supervised Support V ector Machine。按照默认设置参数输出分类 结果,如图21所示。冒 Support Vrct nr Inchine Cl i f i Citt icn Prir 3ct ersLrteaSj 972 pmhU172 points di木Gr*tn2J 1 points (
29、Siannk2 2l points Whi I* 385 painti M*Rtdi tl Bern*npc Ul_tmr_rMl*Enttr Ontput Clts;i Filtnwt Chooi*uif t匚 dLi ntrFolynwniftli &Ftnilty FarkAtrPTMiid L4v1sClihssifica.tL&n Prabtbili iy ThreKold 00OKQuuCvictl|图20支持向量机分类器参数设置图21支持向量机分类结果5、分类后处理参照非监督分类。6、结果验证参照非监督分类。总结1、非监督分类的关键部分是类别定义。这个过程需要数据的支持,甚至需要组织野外实地 调查。2、监督分类中的样本选择和分类器的选择比较关键。在样本选择时,为了更加清楚的查 看地物类型,可以适当的对图像做一些增强处理,如主成分分析、最小噪声变换、波段组 合等操作,便于样本的选择;分类器的选择需要根据数据源和影像的质量来选择,比如支 持向量机对高分辨率、四个波段的影像效果比较好。
- 温馨提示:
1: 本站所有资源如无特殊说明,都需要本地电脑安装OFFICE2007和PDF阅读器。图纸软件为CAD,CAXA,PROE,UG,SolidWorks等.压缩文件请下载最新的WinRAR软件解压。
2: 本站的文档不包含任何第三方提供的附件图纸等,如果需要附件,请联系上传者。文件的所有权益归上传用户所有。
3.本站RAR压缩包中若带图纸,网页内容里面会有图纸预览,若没有图纸预览就没有图纸。
4. 未经权益所有人同意不得将文件中的内容挪作商业或盈利用途。
5. 装配图网仅提供信息存储空间,仅对用户上传内容的表现方式做保护处理,对用户上传分享的文档内容本身不做任何修改或编辑,并不能对任何下载内容负责。
6. 下载文件中如有侵权或不适当内容,请与我们联系,我们立即纠正。
7. 本站不保证下载资源的准确性、安全性和完整性, 同时也不承担用户因使用这些下载资源对自己和他人造成任何形式的伤害或损失。
