 平面运动习题解答
平面运动习题解答

《平面运动习题解答》由会员分享,可在线阅读,更多相关《平面运动习题解答(21页珍藏版)》请在装配图网上搜索。
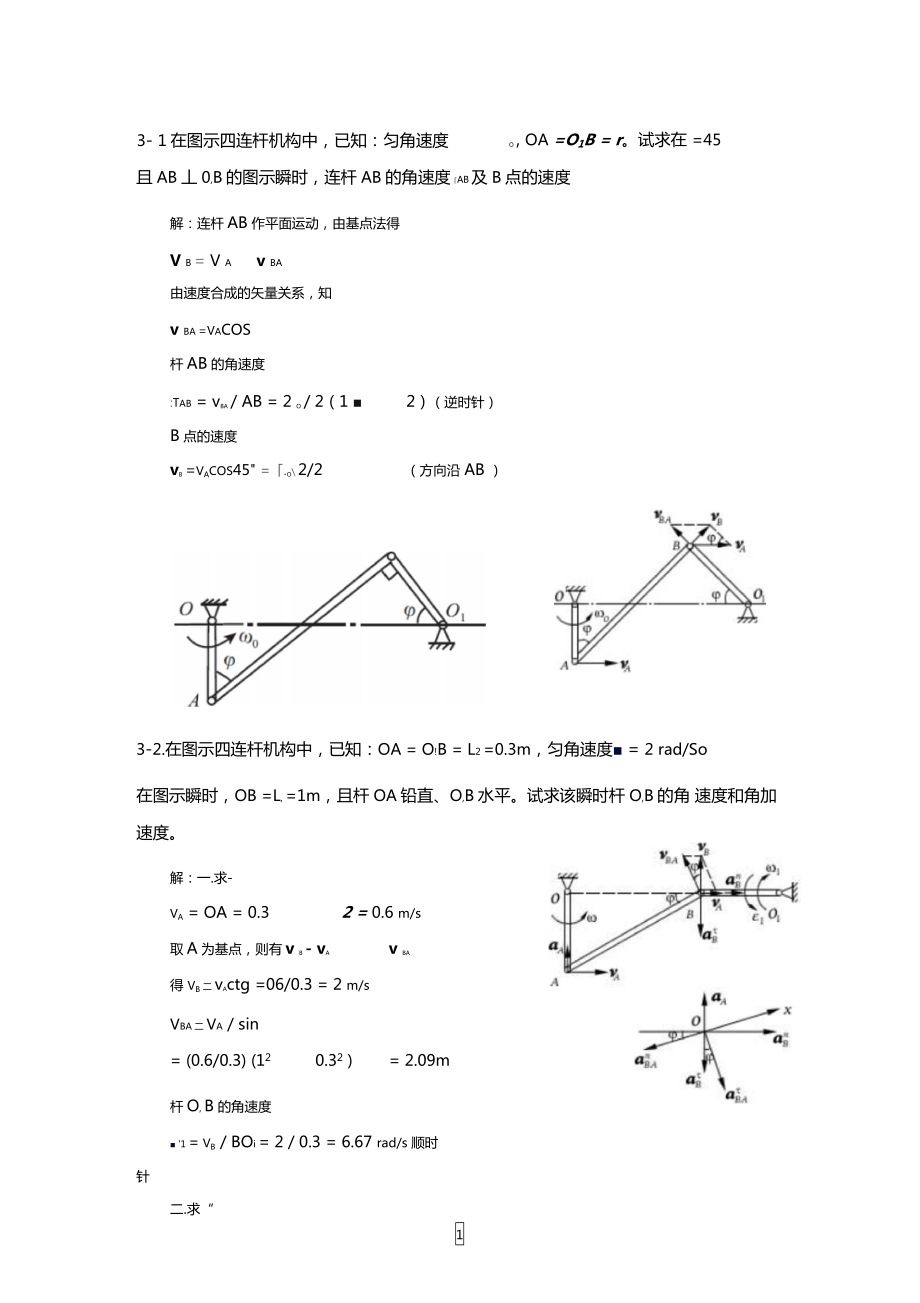
1、3- 1在图示四连杆机构中,已知:匀角速度O , OA =O1B = r。试求在 =4521且AB丄0,B的图示瞬时,连杆AB的角速度ab及B点的速度解:连杆AB作平面运动,由基点法得V B = V Av BA由速度合成的矢量关系,知v ba =VaCOS杆AB的角速度:Tab = vBA / AB = 2 O / 2(1 2)(逆时针)B点的速度vB =vacos45 =.O 2/2(方向沿 AB )3-2.在图示四连杆机构中,已知:OA = O!B = L2 =0.3m,匀角速度 = 2 rad/So在图示瞬时,OB =L, =1m,且杆OA铅直、O,B水平。试求该瞬时杆O,B的角 速度和
2、角加速度。解:一.求-va = OA = 0.32 = 0.6 m/s取A为基点,则有v B - vAv BA得 vb 二 vActg =06/0.3 = 2 m/sVba 二 Va / sin= (0.6/0.3) (120.32 )= 2.09m杆O, B的角速度 1 = vb / BOi = 2 / 0.3 = 6.67 rad/s 顺时针二.求“取点 A为基点,则有 aB aB = aA aBA aBA将上式向X轴投影-aB sin亠a;cos =aAsin :-aBA a -aA (a;A/ sin -:) a;ctg二 _OA,2 ( vBA / AB sin :) vB ctg
3、: / O1B2二 57.8m/ s杆 O1B 的角加速度匕1 = a / O1B = 57.8/ 0.3 = 192.7 rad/s?逆时针3-3.图示机构中,已知:OA=0.1m, DE=0.1m, EF=0.1.3m , D 距 OB 线为h=0.1m;oa = 4rad s。在图示位置时,曲柄 OA与水平线OB垂直;且B、D和F在同一铅直线上。又DE垂直于EF。求杆EF的角速度和点F的速度。解 滑块3 平移。1 Bvc 丄 DC,机构中,AB,月(7和亦作平曲运动,曲柄04和三角块作定轴转动,而F柞平移*此时杆上心均沿水平方向如图4铀所示,所以| 柞瞬时=t - OA +- 0.40
4、ini心丄DB DCOAHBC的速懂瞬心在点D.故DE vB = 0,40llVs方向沿杆F)01 9*8b)VE= DE、亠DC DB 由速度投崽定理得rF v由几何关系知砒DEF中,后.COS(P - * $111?=vF = = 0.462 Ul/S ( t co沖杆盯的速度瞬心在点尸=- -上=尸-1 33 rad/s (顺)齐 PF EF/sin EF3-4.在瓦特行星传动机构中,平衡杆 OiA绕Oi轴转动,并借连杆AB带动曲柄 0B;而曲柄OB活动地装置在O轴上,如图所示。在 O轴上装有齿轮I,齿轮II 与连杆 AB 固连于一体。已知:* 二 “ =0.3.3m,OiA=O.75m
5、, AB=1.5m;又平衡杆的角速度-O1 =6rads。求当 =60且- 90时,曲柄OB和齿轮I的角速度。解 连杆肿作平面运动,其它构件件:宦轴转动如图9-10b所示*丄O.A , vB丄OR, 故连杆仝月的速应瞬心在和延长线的交点尸。设轮I与轮I【的幡合点为U此时乩 为直角三角形./ = 60%由几何关系知:4Rr-PA = - = 3.00111 PB = ran60 = 1.505 m cos/PC = PB- r2 =1.2V3mwmi s(逆)故O.At)n=L5 radsPAr3 = PB 9朋=2.253 uvs , vc = PC * (0AB = 1 r8Vi Hl/s
6、曲柄DE的角速度齿轮i的角速度=6 rad/s3-5.使砂轮高速转动的装置如图所示。杆 O1O2绕Oi轴转动,转速为n4。O2 处用铰链连接一半径为r2的活动齿轮II,杆O1O2转动时,轮II在半径为3的固 定内齿轮III上滚动,并使半径为ri的轮I绕Oi轴转动。轮I上装有砂轮,随同轮I高速转动。已知 “=11,n4 =900rmin。求砂轮的转速。ri解 轮II作纯滚动,英速度瞬心在点只 如图头11b所示.Z =*冋=(斤+弓)rx + 片丫3 = OfP -仙=儿, * co2 =仙 亠 亠 亠 r2 轮II与轮I的切点(?的速匿壮=2七=2(八+尸皿 =土 =空口2包=心2戏严(+匀他2
7、斤斤斤勾尽二 12/j4 = 10 8001 nun (I)3-6.图示小型精压机的传动机构,OA=OiB=r =0.1m, EB=BD=AD=I = 0.4m。在图示瞬时,OAAD , 0占_ED , OiD在水平位置,OD和EF在铅直位置。已知曲柄OA的转速n =120r min,求此时压头F的速度。M 速度分折如图、杆ED及AD均作平面运动,点P是杆ED 的速度瞬心故 Ve - VD由速度投影定理,有卫D COSfi = VA解得% r2xn Vr+P 卯一心伏60I=1,295 m/s3-7.半径为R的轮子沿水平面滚动而不滑动,如图所示。在轮上有圆柱部分, 其半径为r。将线绕于圆柱上,
8、线的B端以速度v和加速度a沿水平方向运动。 求轮的轴心0的速度和加速度。cofC(b)解 因轮f沿水平面滚动而不滑动,所以轮上与地向接触点C的速度为0.且轮上C 点的加速度沿水平方向的投堀也为6以轮右O为基点分析轮卜点卫及点C的运动.设轮 心O的速度为,加速度为甘0,则口 = rfi) Tg = Rci) i由图b得U F+T 讥+怙 设轮子滚动的角速度为由角加速度为,则牡=0,v vo rcy0 = 7?改解式(1). (2)得RV = R- r +%+(7将二式向水平轴投影.得AO + a AO&七=5 F口 c =5-阳由=a . aCl=0,故町从式(3)t (4)解得 Rn% R-r
9、3 8.在图示平面机构中,已知:BC=5cm, AB=10cm , A点以匀速度UA=10m/s 沿水平运动,方向向右;在图示瞬时,*30 , BC杆处于铅垂位置。试求该瞬时:(1)B点的加速度;(2)AB杆的角加速度;(3)AB杆中点D的加速度。解:(1)求aB和ABVA =常量 ” a A = 0- V a |Vb,且AB不垂直于V a, AB杆作瞬时平动AB = 0 / BC =Vb / BC =10/5 =2rad/s选A为基点,则a Bn - aB a a aBAn a ba 由图中几何关系得ab = a ba ab / cost BC bc / cos30=5 22/( .3/2)
10、 =40.3/3cm/s2;ab 二 aBA /AB 二 40/.3 /10=4 3rad /s2逆时针(2)求 aD选A为基点则a d = aA a da a daaD 二 a da 二 DA ;ab = 5 4/3= 20.3/3cm/s2方向如图示3-9平面机构中在图示 =30位置时,杆AB及O2C分别处于水平及铅垂位 置,O1A 为铅垂线,O1A=O2C=L=1Ocm, UA=8cm/s,a=0。试求此瞬时:(1) 连杆BC的角速度BC; (2)杆O2C的角速度-2; (3)杆O1B的角加速度。得VB =Va/cos60 =8/cos60 =16cm/s取点C为基点,则得VB =Vc亠
11、Vbc故Vc =VBC =VB =16 cm/s.” cdbc =VBC/BC =16/20 = 0.8 rad/s 顺时针2 =VC /CO2 =16/10 =1.6 rad/s 顺时针AB杆的速度瞬心为点Oj,故:ab = Va / O1A = 8/10 = 0.8 rad/s有 aB“ =Vb2/O1B =162 /20 = 12.8cm/s2aBA* = BA AB2 = 6.4 3cm/s2取点A为基点A =0),则有aBaj二aBA aBAn将上式向水平轴投影tononaB cos60 - aB sin 60 =aBA得aB =2(AB ,AB2 -VB2 sin60 /O“B)
12、=0”= aB /O! B = 03- 10.半径为R的圆盘沿水平地面作纯滚动,细杆 AB长为L,杆端B可沿铅 垂墙滑动。在图示瞬时,已知圆盘的角速度-0,角加速度为;o,杆与水平面的夹 角为九试求该瞬时杆端B的速度和加速度。解:(1)求VBC1为圆盘速度瞬心,故 Va=Ro C2为杆AB速度速度瞬心,故ab =VA / AC? = R 0 / Lsin v.VB 二 BC2ab 二 Leos v R 0 / Ls in v=R 0ctgv铅直向下(2)求 aB aA = R;0,选A为基点,则naB - aA aBA aBA上式投影在BA方向有aB si nr - aA cost aBA*2
13、二aB = (R cosT + Leo AB )/sin 日=R ;0ctg v (R2 02/Lsinv)方向:铅直向下 311.如图所示,轮O在水平面上滚动而不滑动,轮心以匀速:。= 0.2m s运动 轮缘上固连销钉B,此销钉在摇杆O1A的槽内滑动,并带动摇杆绕 O1轴转动。 已知:轮的半径 R=0.5m,在图示位置时,AO1是轮的切线,摇杆与水平面间的 交角为60。求摇杆在该瞬时的角速度和角加速度。解(1)运动分析轮0上点为动点”动乘固结于0川 绝对运动为平面曲线(摆线h柑对运动沿。祖 直统,牵连运动为绕Q定轴转动9速度分析如图所示气=气+气方向 V V 大小 J ?CB =屁 0ttO
14、.A角速瞠叫=- = 0.2 rad/s y/3R 2R=y0 r = r 22R(3) 加速度分析.如I图9-24c所示轮O作平面运动,以O为基点,疚。二0,= 0 HaBOBOR2Q B = 0 o 方向 ? J 大小轮O上点B坷动点, 务=砒 沿 BO BOX Rg)2 OxB 动系固结于OiA:+ al + (-方向大小式(3)向方向投影,得m = 一桿;+ 5= 2Vr-T2.-.-44%_鬲一间?_6F也 匚 L2R _八岛046 2M312.已知图示机构中滑块 A的速度为常值,:A =02m. s , AB=0.4m。图示位置AB=BC, v -30。求该瞬时杆CD的速度和加速度
15、。F77TDnkwN DKX/1J解 选套筒C为动点,AB杆为动系;图(a)中,点P为AB杆 的瞬心,故AB杼的角速度S = T4 = yJA3 PC =磊 m/sT% = %十吟B V3加速度分析如图(b), AB杆作平面运动,以A为基点,有 + 。餉解得flB = flA + OfiA大小?0 AB -方向如图(b所示张jg =器=43 rad/2? AB 再选套筒C为动点,AB杆为动系f有aa = ae + ar + ac其中兔二叱二 cja + aA + oca这里C是AB杆上与C重合的点,所以% = 4 十 吒a + 晓aar + ac大小?0AC * gab AC cuab ? 2
16、a)vr方向皆如图所示向7轴投影解出 =考m/f313.平面机构的曲柄OA长为2a,以角速度0绕轴O转动。在图示位置时, AB = BO且.OAD = 90。求此时套筒 D相对于杆BC的速度。解:1 .分析滑块BVA = 2a 0 , VBe = a 0VBaVBecos302a 02 .杆AD作平面运动3分析滑块D4a 0Va 二VDaCOS30 ,VDa3 14.曲柄导杆机构的曲柄 OA长120mm,在图示位置.AOB=90时,曲柄的角 速度=4rad/s,角加速度:=2 rad/s2试求此时导杆AC的角加速度及导杆相对 于套筒B的加速度。设 OB=16Omm。解:1. V:分析滑块B (
17、动系)Va = 0AVa= Vb= Va cost = OAcost= vrVba= Vasinr = OAsin v2Vba OAAC =AB2. a:分析滑块 aA =OA OAB (动系),aA = OA 2aa - aB - aA aA a BA aBA二 a c a r将上式沿AC方向投影(喻J2。=3)一160 一4ta(a)BCar = aA cosv a a sin v aBA22 OA 将=OA : cost -OA “,sin j .AC - sin 02-交45.28 mm/s加速度的矢量方程沿垂直AC的方向投影:a;A -a;sin 日-aA co -aCna baOB
18、ta aara;A 二 aAsin j aAcosv - ac =574.08 mm/s2Cta ba,、ac一 =2.87 rad/sAB玄疣:0诱:国他于巒壮Vi二讥忌y 水殺场:LVpf =弘6毗何铝前向接那卅,山协=-恥 &尢施A爲気冈了*伶E .爲=氐卜OF仏碣十d磧般刚申佝彩昭! of吓二S沖/3- 16平面机构如图所示。 套筒在轮缘上B点铰接,并可绕B转动,DE杆穿过套筒。已知: r=h=20cm,OA=40cm。在图示位置时,直径AB水平,杆DE铅垂,0A杆的角速度,=2rad/s。 试求该瞬时杆DE的角速度以及角加速度。解:轮作平面运动以A为基点:Ua=OA =80cm/suc Ua Ucauc=uaCOs60 =40 cm/s以C为基点:Ub = UcUbcDE=Ue/DB=1rad/saet=7.57 m/s2a de=18.93动点:铰链B,动系:DE即 UcUbc =Ue Ur得Ue=Uc逆时针2rad/s 逆时针金卜厉遍二沈换 伺阮少归嗨条认)沁 4BC予向樹 ?加二力 =莎叮沖0无十轴二久p我也十亦角肚加可堀头轴帥打)闵:亦tv/r (f牛厂 7/e,广Q(X&=如
- 温馨提示:
1: 本站所有资源如无特殊说明,都需要本地电脑安装OFFICE2007和PDF阅读器。图纸软件为CAD,CAXA,PROE,UG,SolidWorks等.压缩文件请下载最新的WinRAR软件解压。
2: 本站的文档不包含任何第三方提供的附件图纸等,如果需要附件,请联系上传者。文件的所有权益归上传用户所有。
3.本站RAR压缩包中若带图纸,网页内容里面会有图纸预览,若没有图纸预览就没有图纸。
4. 未经权益所有人同意不得将文件中的内容挪作商业或盈利用途。
5. 装配图网仅提供信息存储空间,仅对用户上传内容的表现方式做保护处理,对用户上传分享的文档内容本身不做任何修改或编辑,并不能对任何下载内容负责。
6. 下载文件中如有侵权或不适当内容,请与我们联系,我们立即纠正。
7. 本站不保证下载资源的准确性、安全性和完整性, 同时也不承担用户因使用这些下载资源对自己和他人造成任何形式的伤害或损失。
