《现代传感技术传感器选型实例FSR压力传感器》由会员分享,可在线阅读,更多相关《现代传感技术传感器选型实例FSR压力传感器(5页珍藏版)》请在装配图网上搜索。
1、现代传感技术1.传感器的现场选型,以及例子说明需求分析:用于二足机器人的脚底,主要研究行走或受外力干扰时,通过动态平衡控制使行走更趋于稳 定,并增强站立时稳定性。二足机器人站立高为320mm,宽为230mm,重量约为1.5kg 。选型:FSR共有四种类型传感器分别为400、402、406、408。他们的区别在于接触面积,和厚度不同。400有效面积为0.2,层最厚部分为0.012。402有效面积为0.5,层最厚部分为0.018。406有效面积为1.5 X1.5,层最厚部分为0.018。408有效面积为24 0.25,层最厚部分为 0.135 。由于二足机器人重量较轻,需要在脚底安置多个进行精密测
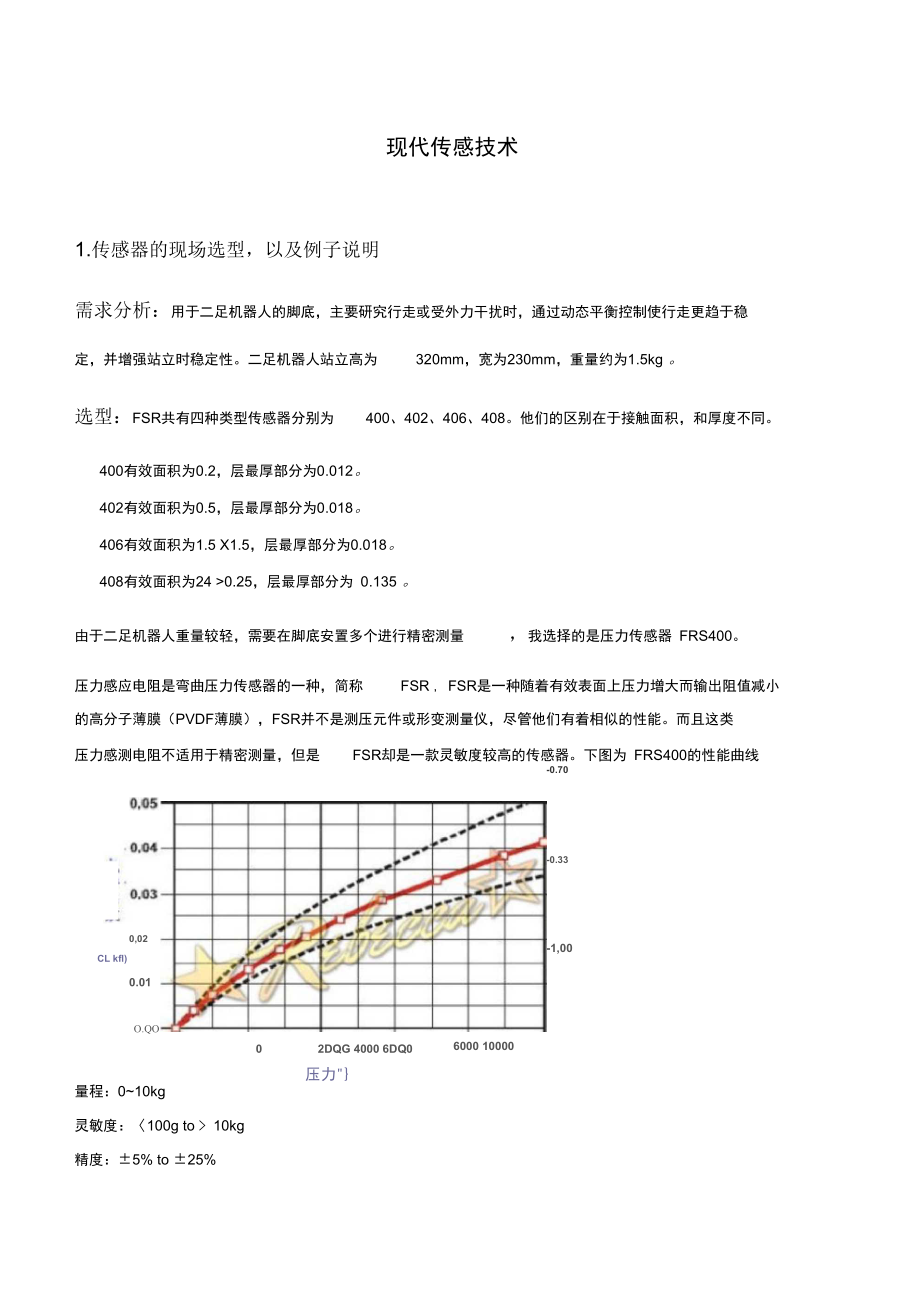
2、量,我选择的是压力传感器 FRS400。压力感应电阻是弯曲压力传感器的一种,简称FSR , FSR是一种随着有效表面上压力增大而输出阻值减小的高分子薄膜(PVDF薄膜),FSR并不是测压元件或形变测量仪,尽管他们有着相似的性能。而且这类压力感测电阻不适用于精密测量,但是FSR却是一款灵敏度较高的传感器。下图为 FRS400的性能曲线0,02CL kfl)0.01O.QO-0.70-0.33-1,0002DQG 4000 6DQ0压力6000 10000量程:010kg灵敏度:100g to 10kg精度:5% to 25%力分辨率:充分利用力的0.5%延时时间:12ms温度范围:-30 C t
3、o +70 C价格:76/个根据以上参数,FRS400适用于二足机器人的动态平衡控制,可进行实验。用法:FSR400的接法:应用在二足机器人上的主要四个方面:目的:当机器人运行时,经传感器取值并通过控制器补偿机器人重心稳定位置,分析比较不同控制器的性 能差异,让机器人不论在静态、动态都具有抗干扰性,使机器人在姿态及运作效能上得以改善。硬件架构:该二足机器人是由双足十个自由度、头部一个自由度、伺服机驱动模块、无线模块、超生波传感器、电子罗盘、加速度计以及8颗压力传感器构成。脚底是 A/D转换电路及8颗压力传感器组成,大小为6cm X9cm。主要是借由脚底压力传感器的取值并运算出实际重心位置之后,
4、并控制伺服机以达到行走平衡的目的。由于压力传感器输出的是模拟信号,为了使实验板取得压力值、节省空间,故在脚底板设计 A/D转换电路。F图为传感器位置软件构架:为了能够方便测试与监控机器人状态,适用VC6.0开发环境,并用 MFC构建监视画面。平衡架构:机器人步行时,平衡重心的便宜分为单脚与双脚两种情况,下图为脚底坐标系统。L3R4;-1 RiF(左)一 k(Tt)-前)平衡架构分为:压力传感器初始化、压力传感器取得压力值、压力值滤波、重心误差、平衡控制及伺服 机补偿等6个构架。下图为控制流程图结论:透过二足传感器取得压力值,并计算机器人实际重心位置,再将实际重心位置以模糊控制器运算,计算机器人
5、步行时各伺服机的补偿角度,并与PID控制器运算做比较,透过各伺服机角度补偿可明显看出补偿前后的差异。名词解释:伺服机:伺服机是遥控模型控制动作的动力来源,主要是由外壳、电路板、无核心马达、齿轮与位置检测器所构成。其工作原理是由接收机发出讯号给伺服机,经由电路板上的IC判断转动方向,再驱动无核心马达开始转动,透过减速齿轮将动力传至摆臂,同时由位置检测器送回讯号,判断是否已经到达定位。PVDF :是有机压电材料,又称压电聚合物。这类材料及其材质柔韧、低密度、低阻抗和高压电电压常数(g)等优点为世人瞩目,且发展十分迅速,现在水声超声测量,压力传感,引燃引爆等方面获得应用。不足 之处是压电应变常数(d)偏低,使之作为有源发射换能器受到很大的限制。自由度:机构具有确定运动时,为了使机构得以确定,必须给定独立广义坐标的数目。数目常以F表示,如F0就可以成为一个机构,表明有相对运动。I I r*ir=0卜Et -I)H. I盧雋器FK力值IHfc rci?=fiErmrfiHlft单观支拎 1rfe 左持O N应补吃左押喷耶生制川朗匮补性就脚啊郡殳卿醮角度陡盖角度补愷凰廉疳呈甫匱Welcome ToDownload !欢迎您的下载,资料仅供参考!
 现代传感技术传感器选型实例FSR压力传感器
现代传感技术传感器选型实例FSR压力传感器