 滑块传送带模型分析带答案
滑块传送带模型分析带答案

《滑块传送带模型分析带答案》由会员分享,可在线阅读,更多相关《滑块传送带模型分析带答案(13页珍藏版)》请在装配图网上搜索。
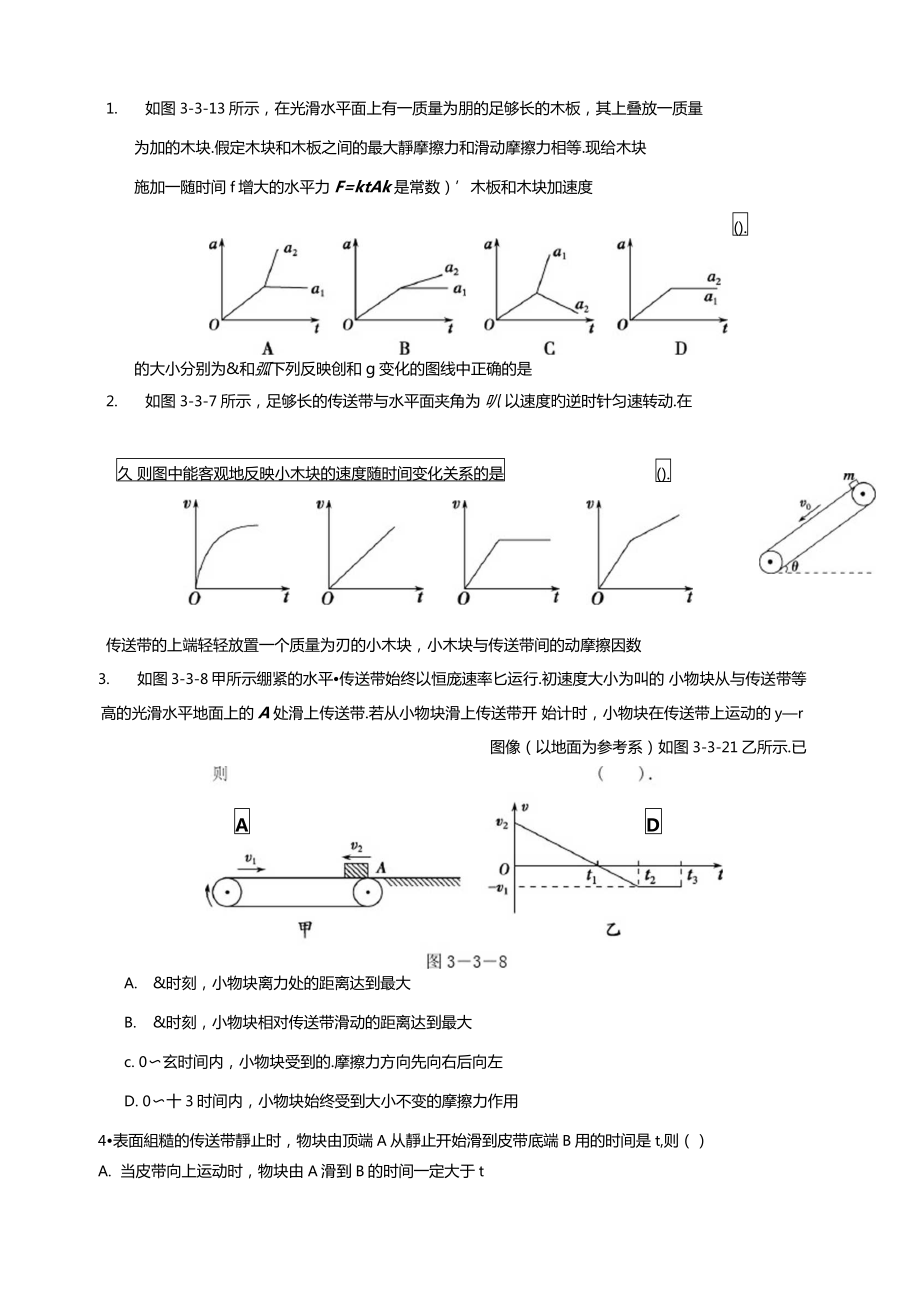
1、1. 如图3-3-13所示,在光滑水平面上有一质量为朋的足够长的木板,其上叠放一质量为加的木块.假定木块和木板之间的最大靜摩擦力和滑动摩擦力相等.现给木块施加一随时间f增大的水平力F=ktAk是常数)木板和木块加速度().的大小分别为&和弧下列反映创和g变化的图线中正确的是2. 如图3-3-7所示,足够长的传送带与水平面夹角为 叭 以速度旳逆时针匀速转动.在传送带的上端轻轻放置一个质量为刃的小木块,小木块与传送带间的动摩擦因数久 则图中能客观地反映小木块的速度随时间变化关系的是().AD3. 如图3-3-8甲所示绷紧的水平传送带始终以恒庞速率匕运行.初速度大小为叫的 小物块从与传送带等高的光滑
2、水平地面上的A处滑上传送带.若从小物块滑上传送带开 始计时,小物块在传送带上运动的yr图像(以地面为参考系)如图3-3-21乙所示.已A. &时刻,小物块离力处的距离达到最大B. &时刻,小物块相对传送带滑动的距离达到最大c. 0玄时间内,小物块受到的.摩擦力方向先向右后向左D. 0十3时间内,小物块始终受到大小不变的摩擦力作用4表面組糙的传送带靜止时,物块由顶端A从靜止开始滑到皮带底端B用的时间是t,则()A. 当皮带向上运动时,物块由A滑到B的时间一定大于tB. 当皮带向上运动时,物块由A滑到B的时间一定等于tC. 当皮带向下运动时,物块由A滑到B的时间一定等于tD. 当皮带向下运动时,物
3、块由A滑到B的时间一定小于t5. 如图是一条足够长的浅色水平传送带在自左向右匀速运行。现将一个木炭包无初速地放 在传送带的最左端,木炭包在传送带上将会留下一段黑色的径迹。下列说法中正确的是()A. 黑色的径迹将出现在木炭包的左侧虫食、B. 木炭包的质量越大,径迹的长度越短卞倉邊C. 传送带运动的速度越大,径迹的长度越短 D. 木炭包与传送带间动摩擦因数越大,径迹的长度越短6. 、如图所示,水平传送带上M、两端点相距x=4 m,传送带以内=2m/s的速度(始终保 持不变)顺时针运转.今将一小煤块(可视为质点)无初速度地轻放至M点 n处,已知小煤块与传送带间的动縻擦因数为,g取lOm/s2.由于小
4、煤块与(J严传送带之间有相对滑动,会在传送带上留下划痕.在小煤块从力运动到的过程中()A.所用时间是、Q s B.所用时间是sC. 划痕长度是4 m D.划痕长度是m7如图所示,一粗糙的水平传送带以恒定的速度力沿顺时针方向运动,传送带的左、右两 端皆有一与传送带等高的光滑水平面,一物体以恒定的速率内沿水平面分别从左、右两端 滑上传送带,下列说法正确的是A. 物体从右端滑到左端所需的时间一定大于物体从左端滑到右端的时间B. 若v2ru物体从左端滑上传送带必然先做加速运动,再做匀速运动C. 若物体从右端滑上传送带,则物体可能到达左端D. 若r2时,长木板便会开始运动D.无论怎样改变尸的大小,长木板
5、都不可能运动解析:木块受到的滑动摩擦力大小为“从由牛顿第三定律,长木板受到刃对它的摩擦 力大小也是“g,对长木板使用平衡条件得地面对长木板的静摩擦力为2飓,A正确改 变厂的大小,木块刃受到的滑动摩擦力不会发生变化,长木板受力不变,D正确.答案:AD2.如图18所示,某工厂用水平传送带传送零件,设两轮子圆心的距离为S,传送带 与零件间的动摩擦因数为”,传送带的速度恒为V,在P点轻放一质量为m的零件,并使被 传送到右边的Q处。设零件运动的后一段与传送带之间无滑动, 为,摩擦力对零件做功为.分析与解:刚放在传送带上的零件,起初有个舞滑动摩擦力加逮的过程, 増加到与传送带速度相同时,物体与传送带问无相
6、对运动,摩擦力大小由 突变为零,此后以速度V走完余下距离。则传送所需时间由于 f= P mg二ma 所以 a= M g.加速时问加速位移通过余下距高所用时问r _s-s.V2 v V 2 您共用时问亠”縻擦力对零件做功 =Ci 于 4 =十 v 2附=丄卍23如图7所示,一质量为777=2 kg的滑块从半径为e m的光滑四分之一圆弧轨道的顶端M处由靜止滑下M点和圆弧对应的圆心0点等高,圆弧的底端与水平传送带平滑相接已知传送带匀速运行的速度为r0=4m/St 点到传送带右端C点的距离为Z=2m.当滑块2滑到传送带的右端C时,其速度恰好与传送带的速度相同.(尸10 m/sJ),求:(1) 滑块到达
7、底端时对轨道的压力;(2)滑块与传送带间的动.摩擦因数“;(3) 此过程中,由于滑块与传送带之间的摩擦而产生的热量Q.答案(1)60 N,方向竖直向下(2)(3)4 J解析 滑块由M到的过程中,由机械能守恒定律得:刃0?=如彳2物体在点,由牛顿第二定律得:Fl眾 由两式得:用=60 N由牛顿第三定律得滑块到达底端时对轨道的压力大小为60 N,方向竖直向下.(2) 解法一:滑块在从到C运动过程中,由牛顿第二定律得:mng=ma 由运动学公式得:汗一/=2泣由三式得:“=解法二:滑块在从力到C整个运动过程中,由动能定理得:ihrR+ PmgL=*ivF_Q 解得:=(3) 滑块在从到C运动过程中,
8、设运动时间为七由运动学公式得:ro= vat 产生的热量:Q= umggt-E) 由得:Q=4 J.4如图9所示,绷紧的传送带与水平面的夹角=30 ,皮带在电动机的带动1 持处=2 m/s的速率运行,现把一质量为刃=10 kg的工件(可看做质点)轻轻放术 端,经过时间t= s,工件被传送到力=m的高处,取尸10 m/s求:(1) 工件与传送带间的动摩擦因数;(2)电动机由于传送工件多消耗的电能解析(1)由題图可知,皮带长%=3 m.工件速度达到处前,做匀加速运动的 sin ”TA,位移羽=V t=t匀速运动的位移为XXi=Vo(t ti)解得加速运动的时间b= S加速运动的位移山=m,所以加速
9、度8=?= m/s2ti由牛顿第二定律有:“吩OSOmgsin 0 =ma,解得=亨.(2)根据能量守恒的观点,显然电动机多消耗的电能用于增加工件的动能、势能以及克服传送带与工件之间发生相对位移时摩擦力做功产生的热量.在时间&内,皮带运动的位移x*=k06= m,工件相对皮带的位移=x,= m摩擦产生的热量Q= Pmgcos &i=60 J,工件获得的动能$=如宀20 J工件增加的势能劣=刃劝=150 J,电动机多消耗的电能0-0+g.+E=23O J.(答案(1)爭(2)230 J5. 如图io所示,质量为刃的物体在水平传送带上由静止释放,n传送带由电动机带动,始终保持以速度y匀速运动,物体
10、与传送带间的G)一 0动摩擦因数为“,物体在滑下传送带之前能保持与传送带相对靜止,图10对于物体从靜止释放到与传送带相对靜止这一过程,下列说法中正确的是()A. 电动机多做的功为L*B.物体在传送带上的划痕长丄一2“gC.传送带克服摩擦力做的功为扌血讪.电动机增加的功率为Pmgv答案D解析 小物块与传送带相对静止之前,物体做匀加速运动,由运动学公式知/初传送带做匀速运动,由运动学公式知对物块根据动能定理 财8=切化 靡擦产生的热量片“ mgx电=u mg(x * x前,四式联立得摩擦产生的热 Q=mvt根据能量守恒定律,电动机多做的功一部分转化为物块的动能,一部分转化为热量,故电动机2多做的功
11、等于仍几A项错误;物体在传送带上的划痕长等于I 1=宀=夕一,B项 z u g错误;传送带克服摩擦力做的功为pmg“ = 2pmgx%=nid、C项错误;电动机增加的功率也就是电动机克服摩擦力做功的功率为“飓,D项正确.6. 如图14所示,倾斜的传送带始终以恒定速率血运动.一小物块以旳的初速度冲上传送带,旳险小物块从/!到的过程中一直做减速运动,则()A.小物块到达端的速度可能等于4 B.小物块到达端的速度不可能等于零C.小物块的机械能一直在减少D.小物块所受合力一直在做负功答案AD解析 小物块一克做减速运动,到点时速度为小于匕的任何值,故A正确,B错误.当小物块与传送 带共速后,如果继续向上
12、运动,摩擦力将对小物块做正功,机械能将増加,故C错误.朕=50, D 正硝.7. 一个平板小车置于光滑水平面上,其右端恰好和一个扌光滑圆弧轨道初的底端等 如图9所示.已知小车质量J=2kg,小车足够长,圆弧轨道半径Cm.现将-(态 kg的小滑块,由轨道顶端M点无初速度释放,滑块滑到端后冲上小车.滑块与小车上表 面间的动摩擦因数(取0=10 m/s2)试求:(1) 滑块到达端时,对轨道的压力大小;(2)小车运动2 s时,小车右端距轨道端的距离; (3)滑块与车面间由于摩擦而产生的内能.)答案(1)15 N (2) m (3) J解析(1)滑块从力端下滑到端时速度大小为呱 由动能定理得mgR=mv
13、 r.= 4 m/s2在点对滑块由牛顿第二定律得人一恥=吟解得轨道对滑块的支持力尺=3恋=15 N由牛顿第三定律得,滑块对轨道的压力大小人 =15 N(2) 滑块滑上小车后,由牛顿第二定律对滑块:mg=ma 得 a=2 m/s 对小车:pmg=Ma 得型=m/sJ设经时问f后两者达到共同速度,则有vaa=aa 解得t= s?由于f= s2 s.故S后小车和滑块一起匀速运动,速度V=azt= m/s因此,2 s时小车右端距轨道端的距离为x=|f+r(2-f)= m% + V V(3) 滑块相对小车滑动的距离为 Ax=厂十一尹=m所以产生的内能Q= gg&x= J14. 如图54一9折示,传送帶与
14、水平面 之间的夹角为0=3,其上4、占两点间的建 离为/= m传送带在电动机的帶动下以& =1 m/s的速度匀速运动现将一庾呈为皿= 图451 10 kg的小物休(可视为灰点脛敢在传送帯的力点,已知小物休 与传送带之间的动摩撩因数超=,在传送芾将小物体心点 传送到点的过程中,求:倉取lOm/s2)(1)传送带对小物体做的功;(2)电动机做的功。(2)电动机做功使小物体机械能增加,同时小物体与传送带 间因摩擦产生热量0由vat得f=/=04s 相对位移 0 =p/-|ar=0.2 m由功能摩擦热Q=/inigr cos0= 15 J故电动机做的功为H=W+Q = 270J.解析(1)小物体轻放在
15、传送带上时,受力分析如图5 4 一10所示根撇牛顿第二定律得 沿語面方向,“7”gcos0igsin&=“m 可知.小物体上升的加速度为 = 2.5 m/s22当小物体的速度为0=1 m/s时,位移x = =().2m然后小物体将以e=l m/s的速度完成J8 m的路程,关系得:Wr = AEP4- AEu=mglsind + ym= 255 J15.电机带动水平传送带以速度卩匀速转动,一质量为刃的小木块由静止轻放在传送带上,若小木块与传送带之间的动摩擦因数为如图所示,当小木块与传送带相对静止时,求:(1)小木块的位移;(2)传送带转过的路程;(3)小木块荻得的动能;(4).摩擦过程产生的摩擦
16、热;(5)电机带动传送带匀速转动输出的总能量.解析木块刚放上,速度为零,必然受到传送带的滑动摩擦力作用,做匀加速直线运动,达到与传送帶相同速度后不再相对滑动,整个过程中木块获得一定的动能,系统要产生摩擦热. 对小木块,相对滑动时, 由ma= umg得加速度&= g,由卩=/得, 达到相对錚止所用时问 戶子(1)小木块的位移彳=舟/=”一Pg22 Pg(2)传送带始终匀速运动,路程S2=M= g(3)小木块获得的动能氏=切*.这一问也可用动能定理解:umgSx=Ei.故=如/产生的廖撩热Q= umg(sz s) =5血.注意,这里凑巧0=&、但不是所有的问题都这样.(5)0能的转化与守恒得,电机
17、输出的总能呈转化为小木块的动能与摩擦热,所以鸟=区+。=亦/rIi答案 丁一(2)尹话(4)-w(5) mv2 PgUg22总结:利用Q=fs进行热量0的计算时,关镀是对相对路程S”的理解.例如:如果两物体同向运动,s 为两物体对地位移大小之差:如果两物体戾向运动,s创为两物体对地位移大小之和;如果一个物体相 对另一个物体往复运动,则s叭为两物体相对滑行路径的总长度.如图5所示,足够长的传送带以恒定速率顺时针运行.将一个物体轻轻放() j ()在传送带底端,第一阶段物体被加速到与传送带具有相同的速度,第二阶段与传送带相对静止,匀速运动到达传送带顶端.下列说法中正确的是 ()A. 第一阶段摩擦力
18、对物体做正功,第二阶段摩擦力对物体不做功B. 第一阶段摩擦力对物体做的功等于第一阶段物体动能的增加C 第一阶段物体和传送带间的摩擦生热等于第一阶段物体机械能的增加量D.物体从底端到顶端全过程机械能的增加量等于全过程物体与传送带间的摩擦生热答案C解析 第一阶段縻擦力对物体做正功,第二阶段縻撩力对物体仍做正功,选项A错误;第一 阶段摩榛力对物体做的功等于第一阶段仙体动能的増加量和重力势能的增加量,选项B错误:笫一阶段物 体和传送带问的摩擦生热等于第一阶段物体机械能的增加量,选项C正确:物体从底端到顶端全过程机械 能的増加量大于全过程物体与传送带问的摩擦生热,选项D错误.例3如图6所示,质量为刃的物
19、体在水平传送带上由靜止释放,传送带由电动机带动,始 终保持以速度卩匀速运动,物体与传送带间的动摩擦因数为“,物体在滑下传送带之 前能保持与传送带相对静止,对于物体从靜止释放到与传送带相对静止这一过程,下列 说法中正确的是 ()A.电动机多做的功为7?/B.物体在传送带上的划痕长一2PgC. 传送带克服摩擦力做的功为*加/D.电动机增加的功率为Pmgv解析 物体与传送带相对挣止之前,物体做匀加速运动,由运动学公式知X林=#,传送带做匀速运 动,由运动学公式知1=口,对物体根据动能定理“昭務=如卩摩擦产生的热量Q= UmgX = 砒(x.xQ,四式联立得摩擦产生的热量戶如此 根据能量守恒定律,电动
20、机多做的功一部分转 化为物体的动能,一部分苓化为热量,故电动机多做的功等于屈几A项错误:物体在传送带上的划痕2长等于1一“=1=亠一,B项错误;传送带克服.摩擦力做的功为umgx$=2 umgx*=m化C项错 2 g误:电动机増加的功率也就是电动机克服摩擦力做功的功率为Umgv, D项正确.答案D25.如图10所示,水平传送带由电动机带动,并始终保持以速度y匀速运动,现将质 量为刃的某物块由靜止释放在传送带上的左端,过一会儿物块能保持与传送带相对静止,设 物块与传送带间的动摩擦因数为“,对于这一过程,下列说法错误的是()A.摩擦力对物块做的功为.物块对传送带做功为C.系统摩擦生热为.电动机多做
21、的功为刃/解析:对物块运用动能定理,摩擦力做的功等于物块动能的増加,即,故A正确;传送 带的位移是物块位移的两倍,所以物块对传送带做功是摩擦力对物块做功的两倍,物块对传 送带做负功,即一刃认故B错;电动机多做的功就是克服传送带的摩擦力做的功,也为血人 故D正确;系统摩擦生热等于摩擦力与相对位移的乘积,故C正确。答案:B例1、一质呈为的长木板靜止在光滑水平桌面上.一质量为刃的小滑块以水平速度从长木 板的一端开始在木板上滑动,直到离开木板.滑块刚离开木板时的速度为旳/3.若把该 木板固定在水平桌面上,其它条件相同,求滑块离开木板时的速度代例2、一块质量为长为的长木板,靜止在光滑水平桌面上,一个质量
22、为田的小滑块以水 平速度处从长木板的一端开始在木板上滑动,直到离开木板,滑块刚离开木板时的速 度为#.若把此木板固定在水平桌面上,其他条件相 m同.求:IHI(1)求滑块离开木板时的速度V;(2)若已知滑块和木板之间的动摩擦因数为求木板的长度例3、如图所示,光滑的曲面轨道的水平出口跟停在光滑水平面上的平板小车的上表面相平, 质量为刃的小滑块从光滑轨道上某处由静止开始滑下并滑下平板小车,使得小车在光滑水平面上滑动.已知小滑块从光滑轨道上高度为的位置 由静止开始滑下,最终停到板面上的0点.若平板小车的 质量为3皿用g表示本地的重力加速度大小,求:(1)小滑块到达轨道底端时的速度大小瞅(2)小滑块滑
23、上小车后,平板小车可达到的最大速度卩;(3)该过程系统产生的总热量Q.例4、如图所示,一质量为、长为/的长方形木板放在光滑的水平地面上,在其右端放 一质量为加的小木块儿 冰.现以地面为参照系,给和以大小相等、方向相反的 初速度(如图),使/开始向左运动、开始向右运动,但最后才刚好没有滑离木板.以 地面为参考系.(1)若已知力和的初速度大小为旳,求它们最后 的速度的大小和方向;(2)若初速度的大小未知,求小木块A向左运动到 达的最远处(从地面上看)离出发点的距离.例5、如图所示,长木板动的方端固定一档板,木板连同档板的质量为虧,a、b间距离s三木 板位于光滑水平面上.在木板。端有一小物块,其质量
24、沪,小物块与木板间的动摩擦因 数它们都处于靜止状态.现令小物块以初速妒srj沿木板向前滑动,直到和挡板相碰.碰撞后,小物块恰 Q b好回到日端而不脱离木板求碰撞过程中损失的机核能.严例1:【答案】例 3:【答案】(1); (2) *2gH ; (3) *Hs , 从心八、M 一2、亠亠 “ c、Mf例4.【答案】(1) vQt万向冋右;(2) /M+m 4M例5.【答案】解析:设木块和物块最后共同的速度为匕由动量守恒定律得设全过程损失的机械能为代则E = mvl (/n + M)v22 2用s表示从物块开始运动到碰撞前瞬间木板的位移,曲表示在这段时间内摩擦力对木板 所做的功.用假表示同样时间內摩擦力对物块所做的功.用亠表示从碰撞后瞬间到物 块回到&端时木板的位移,隐表示在这段时间内摩擦力对木板所做的功.用佛表示同样 时间内摩擦力对物块所做的功.用伊表示在全过程中摩擦力做的总功,则济二WlgS的=_ pmg(S +s)够=一“农$2;= prng(s2 -s)护=;+廉+矶+妮用石表示在碰撞过程中损失的机械能,则E=ET由式解得尸 1 mM 亠E= vo 一 2gs2 in + M代入数据得=
- 温馨提示:
1: 本站所有资源如无特殊说明,都需要本地电脑安装OFFICE2007和PDF阅读器。图纸软件为CAD,CAXA,PROE,UG,SolidWorks等.压缩文件请下载最新的WinRAR软件解压。
2: 本站的文档不包含任何第三方提供的附件图纸等,如果需要附件,请联系上传者。文件的所有权益归上传用户所有。
3.本站RAR压缩包中若带图纸,网页内容里面会有图纸预览,若没有图纸预览就没有图纸。
4. 未经权益所有人同意不得将文件中的内容挪作商业或盈利用途。
5. 装配图网仅提供信息存储空间,仅对用户上传内容的表现方式做保护处理,对用户上传分享的文档内容本身不做任何修改或编辑,并不能对任何下载内容负责。
6. 下载文件中如有侵权或不适当内容,请与我们联系,我们立即纠正。
7. 本站不保证下载资源的准确性、安全性和完整性, 同时也不承担用户因使用这些下载资源对自己和他人造成任何形式的伤害或损失。
