《PID算法程序—位置式PID控制算法(共4页)》由会员分享,可在线阅读,更多相关《PID算法程序—位置式PID控制算法(共4页)(4页珍藏版)》请在装配图网上搜索。
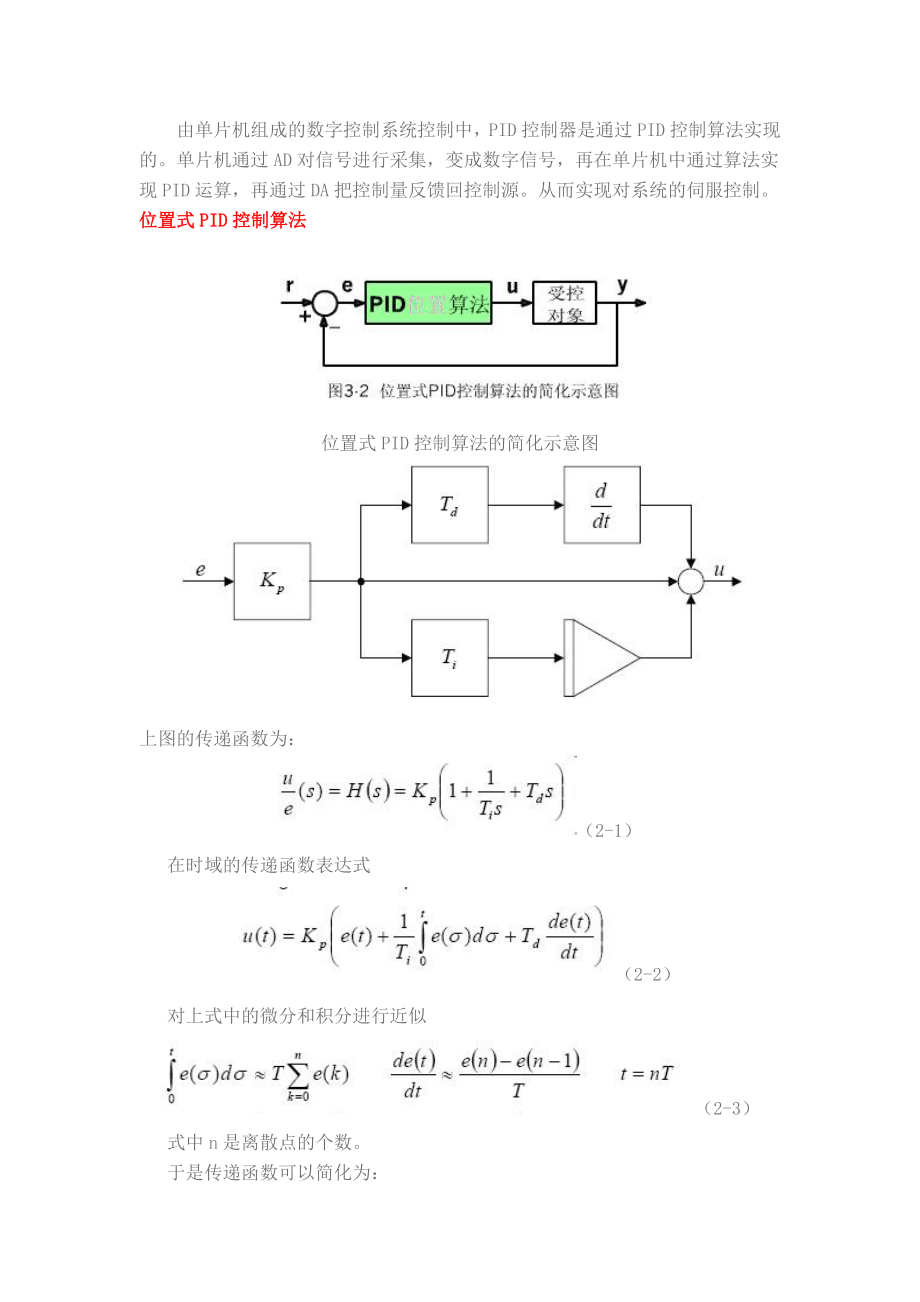
1、由单片机组成的数字控制系统控制中,PID控制器是通过PID控制算法实现的。单片机通过AD对信号进行采集,变成数字信号,再在单片机中通过算法实现PID运算,再通过DA把控制量反馈回控制源。从而实现对系统的伺服控制。位置式PID控制算法位置式PID控制算法的简化示意图上图的传递函数为:(2-1) 在时域的传递函数表达式(2-2) 对上式中的微分和积分进行近似(2-3) 式中n是离散点的个数。 于是传递函数可以简化为:(2-4)其中u(n)第k个采样时刻的控制; KP 比例放大系数;Ki 积分放大系数;Kd 微分放大系数;T 采样周期。如果采样周期足够小,则(2-4)的近似计算可以获得足够精确的结果
2、,离散控制过程与连续过程十分接近。(2-4)表示的控制算法直接按(2-1)所给出的PID控制规律定义进行计算的,所以它给出了全部控制量的大小,因此被称为全量式或位置式PID控制算法。缺点:1)由于全量输出,所以每次输出均与过去状态有关,计算时要对e(k)(k=0,1,n)进行累加,工作量大。2)因为计算机输出的u(n)对应的是执行机构的实际位置,如果计算机出现故障,输出u(n)将大幅度变化,会引起执行机构的大幅度变化,有可能因此造成严重的生产事故,这在实际生产中是不允许的。位置式PID控制算法程序具体的PID参数必须由具体对象通过实验确定。由于单片机的处理速度和ram资源的限制,一般不采用浮点
3、数运算,而将所有参数全部用整数,可大大提高运算速度。这个程序只是一般常用pid算法的基本架构,没有包含输入输出处理部分。 =/*= =*/ typedef struct PID double SetPoint; / 设定目标Desired value double Proportion; / 比例常数Proportional Const double Integral; / 积分常数Integral Const double Derivative; / 微分常数Derivative Const double LastError; / Error-1 double PrevError; / Er
4、ror-2 double SumError; / Sums of Errors PID; /*= PID计算部分 =*/ double PIDCalc( PID *pp, double NextPoint ) double dError, Error; Error = pp-SetPoint - NextPoint; / 偏差 pp-SumError += Error; / 积分 dError = Error - pp-LastError; / 当前微分 pp-PrevError = pp-LastError; pp-LastError = Error; return (pp-Proporti
5、on * Error / 比例项 + pp-Integral * pp-SumError / 积分项 + pp-Derivative * dError / 微分项 ); /*= Initialize PID Structure PID参数初始化=*/ void PIDInit (PID *pp) memset ( pp,0,sizeof(PID); /*= Main Program 主程序=* double sensor (void) / Dummy Sensor Function void actuator(double rDelta) / Dummy Actuator Function v
6、oid main(void) PID sPID; / PID Control Structure double rOut; / PID Response (Output) double rIn; / PID Feedback (Input) PIDInit ( &sPID ); / Initialize Structure sPID.Proportion = 0.5; / Set PID Coefficients sPID.Integral = 0.5; sPID.Derivative = 0.0; sPID.SetPoint = 100.0; / Set PID Setpoint for (;) / Mock Up of PID Processing rIn = sensor (); / Read Input rOut = PIDCalc ( &sPID,rIn ); / Perform PID Interation actuator ( rOut ); / Effect Needed Changes
 PID算法程序—位置式PID控制算法(共4页)
PID算法程序—位置式PID控制算法(共4页)