《扭秤法测引力常量-万有引力测量(共4页)》由会员分享,可在线阅读,更多相关《扭秤法测引力常量-万有引力测量(共4页)(4页珍藏版)》请在装配图网上搜索。
1、扭秤法测引力常量(本讲义材料主要来自清华基础物理实验讲义和中国科技大学的物理实验教材)1引言扭秤法测引力常量是著名的经典物理实验之一,为了确定引力常量G的数值,1798年,卡文迪许(Cavendish)用扭秤法测量了两个已知质量的球体之间的引力,成为精确测量引力常量的第一人。19世纪,玻印亭(Poynting)和玻伊斯(Boys) 又对卡文迪许实验做了重大改进。目前,引力常量公认为6.672 5910-11 Nm2/kg2。 测定引力常量G的意义是极大的。例如根据牛顿运动定律和万有引力定律可以推算出太阳系中天体的运动情况,如果能够定出G的大小,则根据上述计算和观测结果就可以确定地球的质量。从这
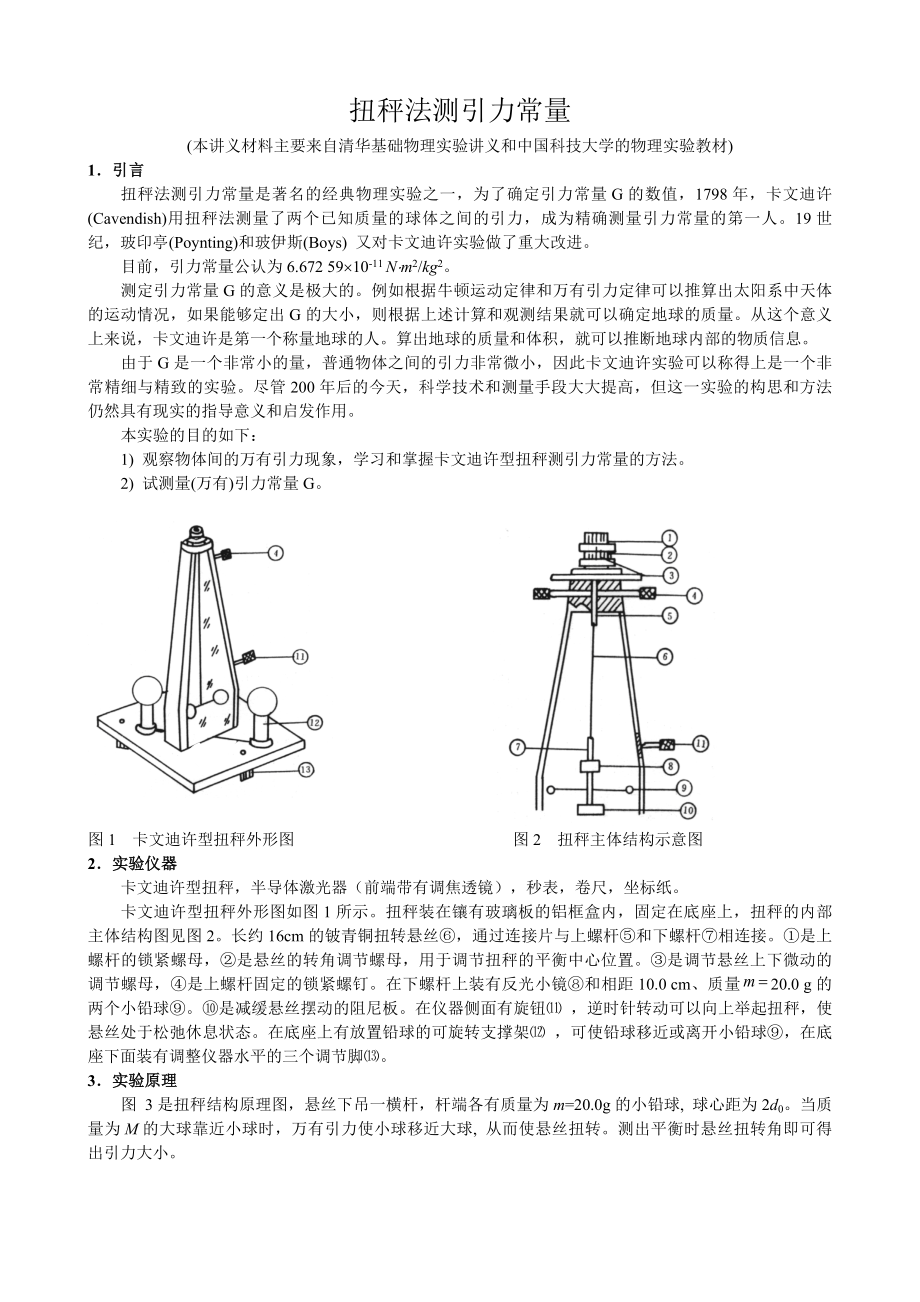
2、个意义上来说,卡文迪许是第一个称量地球的人。算出地球的质量和体积,就可以推断地球内部的物质信息。由于G是一个非常小的量,普通物体之间的引力非常微小,因此卡文迪许实验可以称得上是一个非常精细与精致的实验。尽管200年后的今天,科学技术和测量手段大大提高,但这一实验的构思和方法仍然具有现实的指导意义和启发作用。本实验的目的如下:1) 观察物体间的万有引力现象,学习和掌握卡文迪许型扭秤测引力常量的方法。2) 试测量(万有)引力常量G。 图1 卡文迪许型扭秤外形图图2 扭秤主体结构示意图2实验仪器卡文迪许型扭秤,半导体激光器(前端带有调焦透镜),秒表,卷尺,坐标纸。卡文迪许型扭秤外形图如图1所示。扭秤
3、装在镶有玻璃板的铝框盒内,固定在底座上,扭秤的内部主体结构图见图2。长约16cm的铍青铜扭转悬丝,通过连接片与上螺杆和下螺杆相连接。是上螺杆的锁紧螺母,是悬丝的转角调节螺母,用于调节扭秤的平衡中心位置。是调节悬丝上下微动的调节螺母,是上螺杆固定的锁紧螺钉。在下螺杆上装有反光小镜和相距10.0 cm、质量20.0 g的两个小铅球。是减缓悬丝摆动的阻尼板。在仪器侧面有旋钮 ,逆时针转动可以向上举起扭秤,使悬丝处于松弛休息状态。在底座上有放置铅球的可旋转支撑架 ,可使铅球移近或离开小铅球,在底座下面装有调整仪器水平的三个调节脚。3实验原理图 3是扭秤结构原理图,悬丝下吊一横杆,杆端各有质量为m=20
4、.0g的小铅球, 球心距为2d0。当质量为M的大球靠近小球时,万有引力使小球移近大球, 从而使悬丝扭转。测出平衡时悬丝扭转角即可得出引力大小。图 3 扭秤结构原理图图4所示的是扭秤俯视图, 若大球M紧贴着主体盒的玻璃板且对称于O点放置,大小球球心连线与主体盒中心线PP垂直(小球m的球心基本在PP上)。球心距为r时球间引力F为 (1)mFd0d0M1r激光器sM22sPP坐标纸CALFmO 图4扭秤俯视图(a位置)sM2M12sPP坐标纸CB激光器图5扭秤俯视图(b位置)平衡时引力力偶矩为Mc=2Fd0,悬丝扭转角为s,转镜反射的激光光束偏转角为2s,悬丝的弹性恢复力偶矩Mc正比于刚度系数k与扭
5、转角s之积,即Mc=ks,平衡时Mc=Mc,可得 (2) 再使大球由图4状态转到图5状态,两平衡态之间悬丝和转镜的转角为2s,激光反射光束在坐标纸屏上的光点由A移到B,移动距离为s。 若纸屏到转镜的距离为L,则 (3)根据扭秤运动方程的解,扭秤运动时做振幅衰减的阻尼振动,假设自由振荡周期为T0,可推出 (4)综合(2)、( 3)和(4)式,可得,代入(1)式后可得 (5) 实际上,扭秤实验中小球m除受到(1)式所示的相邻大球的引力作用外,还会受到相距的另一大球M的引力作用,此力垂直于中心线PP的分量将使合力偶矩减小,可以证明,(5)式右侧应乘以稍大于1的修正系数,即 (6) *阻尼振动过程中确
6、定平衡位置的方法 ta2a3a4a5a6a1x扭称的摆动可以视作一个阻尼振动,其振幅(由坐标纸上光点反映)随时间逐渐减小,光点位置随时间的变化过程可以由图6描述。依次记下光点摆动到两端的各个极值点位置坐标a1,a2,a6,则光点静止时的位置坐标A可以由如下平均的方法计算(计算过程假设振幅等差减小,更准确的计算可由等比假设得到,相关内容可参考理科的实验讲义) : 图6 光点振动位移随时间变化关系 (7)4实验步骤 请注意:仪器不得移动,禁止强力触碰,不能调教材未要求调的旋钮和部件。4.1 光路调整 (本步骤已经在实验前由实验教师调整好)扭秤的旋钮原来在逆时针极端, 悬丝处于松弛状态. 这时需调节
7、激光器光束方向:(1)先调水平方向,使光束经过转镜上方的玻璃板反射后,反射光点基本位于入射光线所在的垂直平面内;(2)调激光束垂直方向,使通过望远镜后的光束投射到转镜中心,并使经转镜反射的光束投射到坐标纸屏上,屏上光点位置水平偏离激光光轴(延长线)不大。(3) 调整半导体激光器前端的调焦透镜,使纸屏上光点直径最小。4.2 粗测扭秤偏转中点位置C0与不受力时的实际平衡位置C将两大球轻轻放到支撑架上,使支撑架旋转臂垂直于主体盒厚度中心线PP,并确认小托架应不接触转动部件(实验前已经调好),用磁铁给扭摆一个转动初速度。在扭摆作最大振幅的扭转振动(撞击玻璃板),记下纸上光点两最远端的坐标位置x1和x2
8、,那么C0应为x1和x2的平均值。当扭秤摆不再撞击玻璃板时(可同样用磁铁减缓扭摆的振动幅度),左右极端光点位于x1和x2之间,这时依次记下如图6所示的极端光点位置。由相邻的6个坐标位置,可运用 (7)式求出平衡位置C。 4.3 测扭秤固有振荡周期 T0 (通常大于8分钟) 在4.2中同时用秒表测光点第1次到第5次经过平衡位置C的时间间隔2T0。当小球撞玻板或振幅过小时不要进行测量. 也可以先测光点经相隔23个周期的同侧极值点的时间间隔,再求周期平均值(极值处转速为零,极值时刻判断误差可能稍大). 4.4 测万有引力作用下光点的位移量S慢转支撑架旋转臂,将大球置于图4所示位置(称为a位置)。当小
9、球已不撞击玻板后,依次记下3周期的6个极值光点位置ai,用(7)式求得平衡偏转光点坐标A。将大球轻移至图5所示位置(称b位置),测3个周期的极值点位置并算出平衡光点坐标B。再测一次大球在a位置时的平衡偏转位置A (时间不够可不测)。可以算出 (8) 注意:4.1、4.2 和4.3这几步是整个实验的关键,费时长。要特别注意不碰桌子及仪器,不干扰他人。为使测量准确,相邻两次的极值位置差要小于800mm,且最好大于80mm。如因阻尼而使振幅过小,需增大振幅:用磁铁的不同磁极交替“吸引”两小球而使其增幅,但此操作应当不碰到仪器表面,不出现撞击玻板的现象,并使相邻极值位置差仍不大于800mm。根据A、B
10、值也可以计算不受力时的实际平衡位置C=(A+B)/2 。实验结束后逆时针旋转旋钮使扭秤抬起 ( 已知A和A的平均值后,可以测光点两次单向通过该平均位置的时间间隔作为周期,此法较准确)4.5 测量转镜到纸屏的距离L 两人合作,用卷尺测,不要碰动扭秤。4.6 计算引力常量G. 对测量结果进行讨论,分析可能影响测量结果的主要因素;给出完整的测量结果表达式;并求出与国际推荐值(当作约定真值)之间的相对误差。5补充说明与参考资料5.1 注意事项预习时了解扭秤上主要旋钮的作用;了解在扭秤摆动过程中求其平衡位置的方法;了解影响测量结果的主要因素及如何减小其影响。实验步骤4.4测引力作用下光点的位移量时,应使大球与玻璃板表面轻轻相贴,切莫撞击玻璃板。实验各步骤要连续完成,整个实验中不许再抬、落扭秤。步骤4.4是取得主要数据的关键,空气阻尼下约需60分钟。测量时不要来回走动,不要碰动桌子,不要手摸大球,人远离扭秤, 测量前后各测一次室温 (没有条件可以不测,在实验室里,室温变化较小)。5.2 思考题(1)说明实验中看到的引力现象,基本对称的扭秤框架及周围其它物体对测量结果是否有影响。(2)对实验结果进行讨论,分析影响测量结果的主要因素。6仪器数据列表:m=0.02000.0005Kg, M=1.50000.0020Kgr=0.04630.0010m, d0=0.05000.0005m
 扭秤法测引力常量-万有引力测量(共4页)
扭秤法测引力常量-万有引力测量(共4页)