 松下伺服选型经典计算伺服电机选型实例
松下伺服选型经典计算伺服电机选型实例

《松下伺服选型经典计算伺服电机选型实例》由会员分享,可在线阅读,更多相关《松下伺服选型经典计算伺服电机选型实例(24页珍藏版)》请在装配图网上搜索。
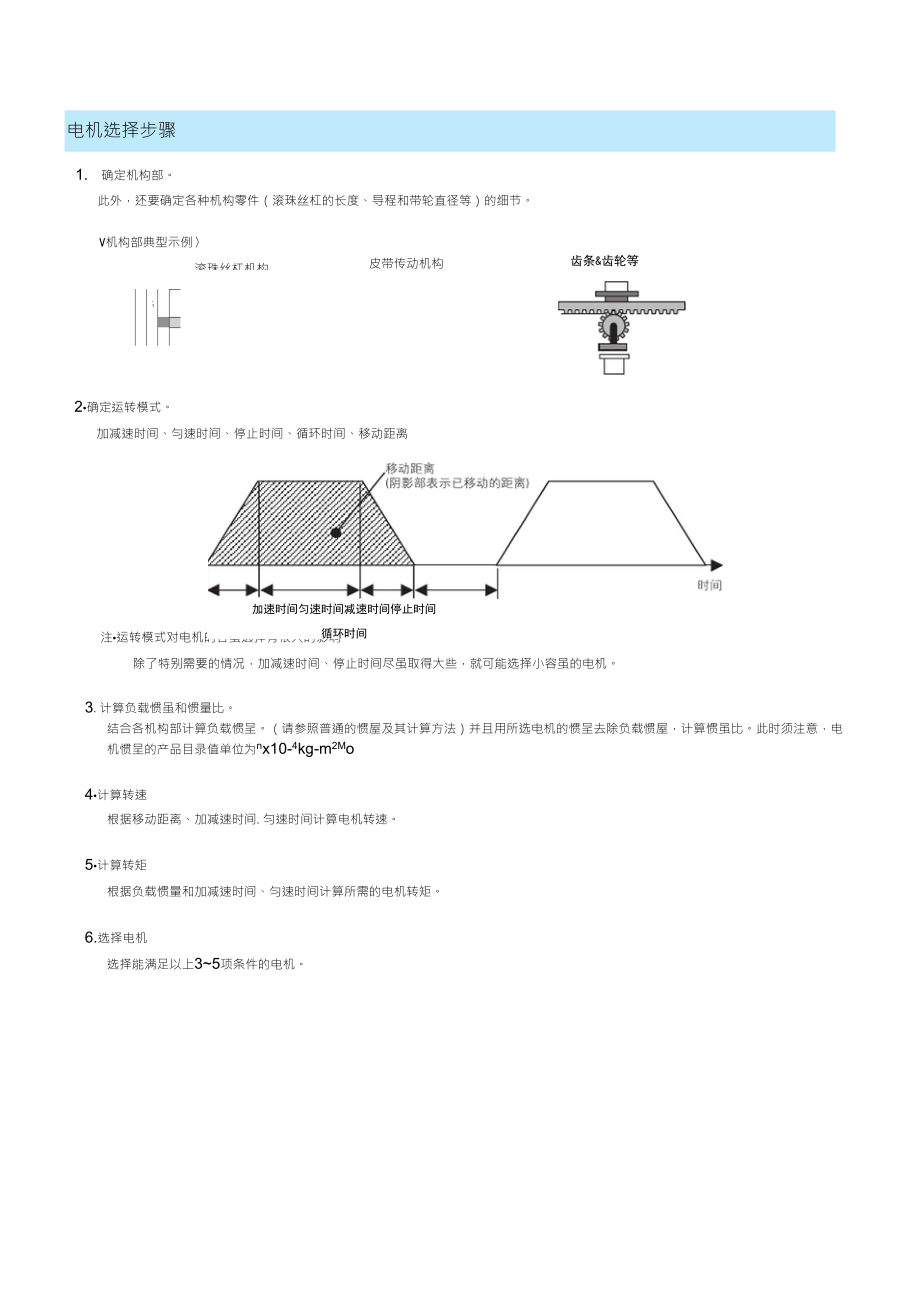
1、电机选择步骤1. 确定机构部。此外,还要确定各种机构零件(滚珠丝杠的长度、导程和带轮直径等)的细节。V机构部典型示例滚珠丝杠机构皮带传动机构-1一1齿条&齿轮等2确定运转模式。加减速时间、匀速时间、停止时间、循环时间、移动距离加速时间匀速时间减速时间停止时间循环时间注运转模式对电机的容虽选择有很大的影响。除了特别需要的情况,加减速时间、停止时间尽虽取得大些,就可能选择小容虽的电机。3.计算负载惯虽和惯量比。结合各机构部计算负载惯呈。(请参照普通的惯屋及其计算方法)并且用所选电机的惯呈去除负载惯屋,计算惯虽比。此时须注意,电机惯呈的产品目录值单位为nx10-4kg-m2Mo4计算转速根据移动距离
2、、加减速时间.匀速时间计算电机转速。5计算转矩根据负载惯量和加减速时间、匀速时间计算所需的电机转矩。6.选择电机选择能满足以上35项条件的电机。与选择相关的项目说明1转矩(1)峰值转矩运转过程中(主要是加减速时)电机所需的最大转矩。大致为电机最大转矩的80%以下。转矩为负值时可能需要再生电阻。移动转矩、停止时的保持转矩电机长时间运转所需的转矩。大致为电机额定转矩的80%以下。转矩为负值时可能需要再生电阻。各机构移动转矩的计算公式滚珠丝杠机构移动转矩Tf=P2n-(ugW+F)nW:质量kgln:机械部分的效率P:导程mlM:摩擦系数F:外力Nlg:重力加速度9.8m/s2皮带传动机构移动转矩T
3、f=吕(ugW+F)FrwiW:质量kgD:导程mF:外力N1T:机械部分的效率M:摩擦系数g:重力加速度9.8m/s2丿(3)有效转矩运转、停止全过程所需转矩的平方平均值的单位时间数值。大致为电机额定转矩的80%以下。/Ta2Xta+Tf2Xtb+Td2XtdTrms=JVtcTa加速时转矩Nmta:加速时间stc:循环时间STf移动转矩【Nmtb:匀速时间(s)(运转时间+停止时间)Td减速时转矩Nmtd:减速时间S2. 转速最高转速运转时电机的最高转速:大致为额定转速以下。需使用至电机的最高转速时,应注意转矩和温度上升。实际的计算请参照选择示例。3AJ=LJ=LLk視至、侦虫IX惯虽相当
4、于保持某种状态所需的力。惯量比是用电机的转动惯虽去除负载惯虽的数值。按照通常标准,750W以下的电机为20倍以下、1000W以上的电机为10倍以下。若要求快速响应,则需更小的惯量比。反之,如果加速时间允许数秒钟,就可采用更大的惯屋比。普通惯量及其计算方法J的计算公式J的计算公式圆盘=-g-WD2(kgm2W:质虽kgD:外径m空心圆柱J=冷一W(D2+d2)kgm2W:质虽kgD:外径md:内径mJ=-W(a2+b2)kgm2W:质量kga,b,c:3条边长mJ=-WL2kgrrAW:质虽kgL:长度m均质圆棒离开旋转中心的圆棒J=-W(3D2+4L2)kgm2W:质虽kgD:外倒m)L:长度
5、mJ=-WD2+WS2kgm2W:质虽kgD:外倒m)s:距离mj-jJ2J1aniIn3换算至a轴的惯虽减速机ni:a轴转速r/minlr)2:b轴转速r/min2J2(kgm2输送机HaF|J二帀一WD2kgm2lW:输送机上的质量kgD:输送轮直径m不含输送轮的J滚珠丝杠WP?J=Jb+仆2kgm2)w:质量kgP:导程Jb:滚珠丝杠的J质量Wlkgl不明时,按下述方法计算。质虽Wkg=密度pkg/m3lx体积V(m3I各种材料的密度铁p=7.9x103kg/m3铝p=2.8x103kg/m3黄铜p=8.5x103kg/m3l电机的容量选择使用滚珠丝杠机构时/选择示例使用滚珠丝杠机构时工
6、件部分的质呈Wa=10Ikgl滚珠幺幺杠的长度Bl=0.5m滚珠幺幺杠的直径Bd=0.02【m滚珠幺幺杠的螺距Bp=0.02【m1使用滚珠丝杠机构时的选择示例滚珠幺幺杠效率移动距离联轴器的惯虽Bn=0.90.3ml2.运转模式:加速时间匀速时间tb=0.8si减速时间td=0.1si循环时间tc=2s加速时间匀速时间减速时间停止时间/循环时间时间Jc=10x10-6kg-m2(可用生产厂家产品目录的数值或计算)电机的容量选择使用滚珠丝杠机构时/选择示例电机的容量选择使用滚珠丝杠机构时/选择示例3. 滚珠丝杠的质量Bw=pxttxj-1BL=7.9x103xit。f?jx0.5=1.24kg4负
7、载部分的惯最Jl=Jc+Jb=Jc+BwxBd2+Wyp284TT2=0.00001+(1.24x0.022)/8+10x0.022/4tt2=1.73x10-4kgm?5.预选电机若选200W,贝IJJM=0.14X10-4kg-m26惯量比Jl/Jm=1.73x10-4/0.14x10-4=12.3倍30.0倍(若选100W,贝IJJM=0.051X10-4,为33.9倍)7.最高速度Vmax-x加速时间xVmax+匀速时间xVmax+x减速时间xVmax=移动距离-|-x0.1xVmax+0.8xVmax+x0.1xVmax=0.30.9xVmax=0.3Vmax=0.3/0.9=0.3
8、34(m/s8.转速要换算成Nr/minh滚珠丝杠转1圈的导程为BP=0.02mN=0.334/0.02=16.7r/s=16.7x60=1002r/min3000r/min(200W电机的额定转速)9计算转矩移动转矩Tf=Bp2ttBt(mgWA+F)=0.022kx0.9(0.1x9.8x10+0)电机的容量选择使用滚珠丝杠机构时/选择示例电机的容量选择使用滚珠丝杠机构时/选择示例=0.035Nm加速时转矩Ta=(Jl+Jm)x2KNr/s加速时间【s+移动转矩电机的容量选择使用滚珠丝杠机构时/选择示例电机的容量选择使用滚珠丝杠机构时/选择示例(73.0+0伫心y6.7+0.0350.19
9、6+0.035=0.231Nm减速时转矩(Jl+Jm)x2itN“引减速时间s-移动转矩CI73x10r+014x10-4)x2Trx167OJ一0.035=0.196-0.035=0.161Nm10.确认最大转矩门确认有效转矩加速时转矩=Ta=0.231NmJ1.91Nm(200W电机的最大转矩)ITa2xta+Tf2xtb+Td2xtdTrms=JVtc0.2312x0.1+0.0352x0.8+0.1612x0.1=0.067Nm0.64Nml(200W电机的额定转矩)12根据以上计算可知转矩虽有较大的余最,但根据惯屋比选择200W电机选择示例使用皮带传动机构时的选择示例1.机构:工件部
10、分的质虽带轮直径带轮质虽机构部分的效率联轴器的惯量Wa=2kg(含皮带)PD=0.05mWp=0.5kg(可用生产厂家产品目录的数值或计算)Bn=0.8Jc=0(电机轴直接连接)2.运转模式加速时间匀速时间减速时间循环时间移动距离ta=0.1stb=0.8sitd=0.1Stc=2si1m速度加速时间匀速时间减速时间停止时间循环时间时间3.负载部分的惯量Jl=Jc(联轴器)+Jb(皮带传动机构)+Jp(带轮)=Jc+4-WaxPd2+4WpxPdS2=0+4-x2x0.052+4x0.5x0.052x2=0.00156=15.6x10-4(kg-m24.预选电机若选750W,则Jm=0.87x
11、10kgm2电机的容量选择使用滚珠丝杠机构时/选择示例电机的容量选择使用滚珠丝杠机构时/选择示例5惯量比Jl/Jm=15.6x10-4/0.87x10417.9倍20倍以下电机选择委托单客户技术咨询窗口收Emailpanasonic-motor电机选择委托单客户技术咨询窗口收Emailpanasonic-motor6.最高速度Vmax冷-x加速时间xVmax+匀速时间xVmax+x减速时间xVmax=移动距离x0.1xVmax+0.8xVmax+x0.1xVmax=10.9xVmax=1Vmax=1/0.9=1.111m/s7转速要换算成Nr/minL带轮转1圈nxPd=0.157mN=1.1
12、11/0.157=7.08r/s=7.08x60=424.8(r/min)3000r/min(750W电机的额定转速)8.计算转矩移动转矩TfPd(pgWA+F)=0.052x0.8(0.1x9.8x2+0)加速时转矩减速时转矩Td=0.061Nml(Jl+JM)x2irN(r/s加速时间s+移动转矩(15.6x10+0.87x10)x2nx7080?i=0.751+0.061=0.812Nml(Jl+Jm)x2TrNr/s减速时间s-移动转矩(15.6x10-4+0.87x104)x2ttx7080J0.751-0.061=0.69Nml+0.061-0.0619.确认最大转矩加遠时转矩Ta
13、=0.812Nm7.1Nm(750W电机的最大转速)10.确认有效转矩ITa2xta2+Tf2xtb2+Td2xtdTrms=JVtcI0.8122x0.1+0.0612x0.8+0.692x0.1=V2=0.241Nmc抬令脉冲输入二c指令代号输入45PULSH246SIGNH147SIGNH2线络歩动器专用脉冲串鏤口COM-A5S?T5(X)kpps-4Mppsffl内便用脉冲招令频率时,诂低用线埒歩动務专用的脉冲申接口。嫁点附近传感器M时针限忖传感爲逆时针限忖传感爲GND+24VDC24V电連控制器FP2-PP2AFP2430(松下电工制造)与MINASA5系列的连接FP2-PP2AFP
14、2430(松下电工制造)血时针脉冲拾令输岀逆时针脉冲措令输岀轧点綸入偵差计数器涵竽输岀原点接近输入1.60外部电運输入AlBlA2B2A5B5A6B6A7B7A19B19A20B20FGFG+24VDCGND驱动器MINASA5系列糸理厳线的处理因设备而异。X乂X乂X乂PLCV0綸出PLCV0綸入19点附近传感器M时针限付传感器逆时针限付传感器PLCI/OGND+24VDC24V电逗控制器FPG-C32T(松下电工制造)顺时针脉冲拾令输岀逆时针脉冲拾令输岀尿点接近输入逆时针超限綸入他时针超限綸入50FG3PULS122gO辛g4PULS25SIGN122gO6SIGN223OZ+舟240Z13
15、,25GND7COM+-Mb30CL29SRV-ON27GAIN31A-CLR9POT8NOT35S-RDY+34S-RDY-37ALM+36ALM-39INP+38INP-41COM-佶令脉冲输入2扌齢代号输入2Z相綸岀计数辭潸竽输入伺般ON输入増益切换输入警报僻除输入正向欤动荼止綸入反向欤动荼止綸入伺服准备就绪綸岀伺服發报输出定位完成输出44PULSH1扌罚脉冲输入1扌罚代号输入145PULSH246SIGNH147SIGNH2线络寥动器专用脉冲申接口A5S?T5(X)kpps-4Mppsffl内便用脉冲招令频率时,诜低用线路票动務左用的脉冲宙按口。FPG-C32T(松下电工制造)MINA
16、SA5系列的连接驱动器MINASA5系列XXXXXCAZ.306.QPLCV0綸岀PLCV0綸入50T5T30292731T堤嚴拔的卿再囚设备而异。2k0I6.6k0Y0Y1X2COMY2COMX3X5X6卒5卿CD-FG0CP1PULS2OCP2SIGN2CZGNDGNDCOM+CLSRV-ON4.70扌齢代号输入2Z相綸出3736GAINA-CLRPOTNOTS-RDY-*-S-RDY-ALM+ALM-INP+INP-COM-计数辭潸竽输入伺般ON输入増益切换输入警报僻除输入正向欤动荼止綸入反向欤动荼止綸入伺服衣备就绪编岀15JUR*报输出定位完成输出19点附近传感器M时针限付传感器逆时针
17、限付传感器GNDDC24V电渥控制器与驱动器的连接F3YP14-ON/F3YP18-0N(横河电机制造)与MINASA5系列的连接19点附近传感器M时针限忖传感為逆时针限忖传感爲GND+24VDC24V电運控制器与驱动器的连接F3YP14-ON/F3YP18-0N(横河电机制造)与MINASA5系列的连接F3YP14-ON/F3YP18-0N(横河电机制造)驱动器MINASA5系列F3NC32-ON/F3NC34-ON(横河电机制造)与MINASA5系列的连接F3NC32-ON/F3NC34-ON(横河电机制造)脉冲綸出A脉冲綸出B馆差脉冲港除输出外部电憑2dV綸入外部电24V綸入(GNDI接
18、点綸入COM反向限忖输入尿点綸入驱动器MINASA5系列FGPULS1屛蔽线的处理囚设笳而异。XXXXXXPLCg输岀PLCV0输入3a4a5a6a19a20a14a1b13a8a9a7aAY7-4H)7.4kO730292731TT35岂37元39PULS2SIGN1SIGN2OZ+OZ-GNDCOM+CLSRV-ON=177T4.70抬令脉冲输入2抬令代号输入2Z相输岀GAJNA-CLRPOTNOTS-RDY4-S-RDY-ALM+ALM-INP+INP-COM-4.7Q4.7Q线於麥动器专用脉冲串鏤口44PULSH145PULSH246SIGNH147SIGNH2二抬令脉冲输入1抬令代号
19、输入1计数器溝竽綸入伺朕ON输入増益切换输入警报解除输入正向歩动荼止输入反向歩动苗止输入伺服冶备就绪输出伺朕警按输岀定位完成输岀A5乗列亦58kpps7b1pps范图内便用脉冲招令频卑时,诂低用线埒歩动務左用的脉冲申接口。19点附近传感器M时针限忖传感為逆时针限忖传感爲GND+24VDC24V电運CJ1W-NC113(欧姆龙制造)与MINASA5系列的连接CJ1W-NC113(欧姆龙制造)与MINASA5系列的连接控制器驱动器CJ1W-NC113(欧姆龙制造)MINASA5系列探區厳线的处却因设备而异。XXrxxyxxPLCV0綸出5056232413,25730292798*嫁点附近传感器M
20、时针限付传感器逆时针限付传感器PLCV0编入GND+24VDC24V电逗343736FGPULS1PULS2SIGN1SIGN20Z+0Z-GNDC0M+CLSRV-ONGAINA-CLRPOTNOTS-RDY+S-RDY-ALM+ALM-INP+INP-COM-扌罚脉冲输入2扌肉代号输入27TTZ相编岀控制器4.7Q4.704.704.70计数器涵竽输入伺朕ON输入増益切换输入警报僻除输入正向躺动茉止綸入反向躺动茉止綸入伺服准备就绪綸出伺般發报输出定位完成输出CJ1W-NC133(欧姆龙制造)与MINASA5系列的连接驱动器CJ1W-NC133(欧姆龙制造)MINASA5系列4DC5V电涯G
21、ND+24VDC24V电海50FG3PULS14PULS222O辛gX-*5SIGN16SIGN223OZ+24OZ-13,25GND7COM+77730CL29SRV-ON27GAINH31A-CLR9POT8NOTCO35S-RDY+34S-RDY-37ALM+36ALM-39INP+38INP-41COM-佶令脉冲输入2扌齢代号输入2Z相编岀计数器涵竽輪入伺朕ON输入増益切换输入警报僻除输入正向躺动茉止綸入反向躺动茉止綸入伺服准备就绪綸岀伺服發报输出定位完成输出控制器与驱动器的连接QD75D1(H菱电机制造)MINASA5系列的连接19点附近传感器M时针限忖传感爲逆时针限忖传感爲控制器与
22、驱动器的连接QD75D1(H菱电机制造)MINASA5系列的连接控制器QD75DKZ菱电机制造)驱动器MINASA5系列他时针脉冲佶令输岀逆时针脉冲拾令转岀字点信号篇差计数器涵竽畀动器单元冶备就绪公共第近点DOG信号上限极限下限扱限A74.7kQ151617189101314121167312冷屛蔽线的处毋囚设伽而异。X乂X乂XXPLCVO输出/V立4暦19点附近传感器默时针限忖传感爲逆时针限忖传感為PLCV0输入A5系列ffSOOkpps-4Mpps苑也内仗用脉冲招令频率时,満便用线路第初器专用的脉冲宙接口。GND+24VDC24V电連44PULSH1抬令脉冲输入1抬令代号输入145PULS
23、H246SIGNH147SIGNH2红总夕动器专用协冲邱後口KV-5000/3000(KEYENCE制造)与MINASA5系列的连接示例控制器KV-5000/3000(KEYENCE制造)总点传感辭綸入X紬限忖开关CWX轴限忖开关CCWX轴CWX轴CCW色堤蔽线的处理囚设希而异。XXXXXX线路郭动器专用脉冲申接。PLCg输出PLCI/O输入GND+24VDC24V电澤INP-COM-43kO-O-43k0FGPULS1PULS2SIGN1SIGN20Z+0Z-GNDCOM+CLSRV-ONGAJNA-CLRPOTNOTS-RDY+S-RDY-ALM+ALM-INP+1341415161926
24、3640畔.m7亦292731TT35岂37元39驱动器MINASA5系列抬令脉冲输入2IS令代号输入2=1Z相输岀7774.704.704.704.704.704.70计数器溝竽编入伺服ON输入増益切换输入警报解除输入正向歩动荼止输入反向歩动苗止输入伺服准备就绪输出伺服警採输岀定位完成输岀44PULSH145PULSH246SIGNH147SIGNH2揺令代号输入1A5系列ffSOOkpps-4Mpps苑也内仗用脉冲招令频率时,満便用线路第动器专用的脉冲用接口。19点附近传感器M时针限忖传感爲逆时针限忖传感爲售后服务(修理)关于修理方面的问题请向销售商提出。当被设置在机械、装置等时请首先与机
25、械、装置厂家联系、咨询。马达公司网上技术信息可下载使用说明书、CAD数据等资料。松下电器产业株式会社马达公司网页问讯处PanasonicCorporation(松下电器产业株式会社)马达公司邮编574-0044电话+81-72-871-1312(总机)PanasonicCorporation松下马达(中国事业部)总公司邮编200235电话+86-021-51087196(总机)企业标准编号交流伺服马达Q/PMRZ7交流伺服驱动器Q/PMRZ6销售及技术服务信息如果有选型及技术服务的问题,请联系:上海太鑫电子科技有限公司电话:021-51087196021-60909716传真:021-5862990邮编:200235电由0:panasonic-motorfoxmailcom地址:上海市龙漕路13蒔另凯诚商务大厦11卷IME09A1009-0PanasonicCorporation2009
- 温馨提示:
1: 本站所有资源如无特殊说明,都需要本地电脑安装OFFICE2007和PDF阅读器。图纸软件为CAD,CAXA,PROE,UG,SolidWorks等.压缩文件请下载最新的WinRAR软件解压。
2: 本站的文档不包含任何第三方提供的附件图纸等,如果需要附件,请联系上传者。文件的所有权益归上传用户所有。
3.本站RAR压缩包中若带图纸,网页内容里面会有图纸预览,若没有图纸预览就没有图纸。
4. 未经权益所有人同意不得将文件中的内容挪作商业或盈利用途。
5. 装配图网仅提供信息存储空间,仅对用户上传内容的表现方式做保护处理,对用户上传分享的文档内容本身不做任何修改或编辑,并不能对任何下载内容负责。
6. 下载文件中如有侵权或不适当内容,请与我们联系,我们立即纠正。
7. 本站不保证下载资源的准确性、安全性和完整性, 同时也不承担用户因使用这些下载资源对自己和他人造成任何形式的伤害或损失。
