 台达20PM追剪应用总结A
台达20PM追剪应用总结A

《台达20PM追剪应用总结A》由会员分享,可在线阅读,更多相关《台达20PM追剪应用总结A(12页珍藏版)》请在装配图网上搜索。
1、台达20PM追剪应用总结 作者:(PLC产品处 余强) 【摘要】 简介台达DVP-20PM00D运动控制器电子凸轮(CAM)功能,总结追剪曲线的生成几种措施,论述通用高速追剪工作原理,以及有关工艺规定及有关控制程式概要。以使读者根据文章即可实现不同追剪系统的控制【關鍵字】运动控制器,电子凸轮,CAM Table,追剪 【前言】 本文简介的追剪系统,是同步式剪切系统中的一种,其她尚有飞剪,旋切。它们之间最大的区别是:追剪是来回运动,而飞剪是为同向运动。对台达20PM运动控制器来说重要是电子凸轮的CAM曲线不同。下文简介的重要是台达20PM运动控制器电子凸轮功能在高速追剪系统的应用总结。【正文】一
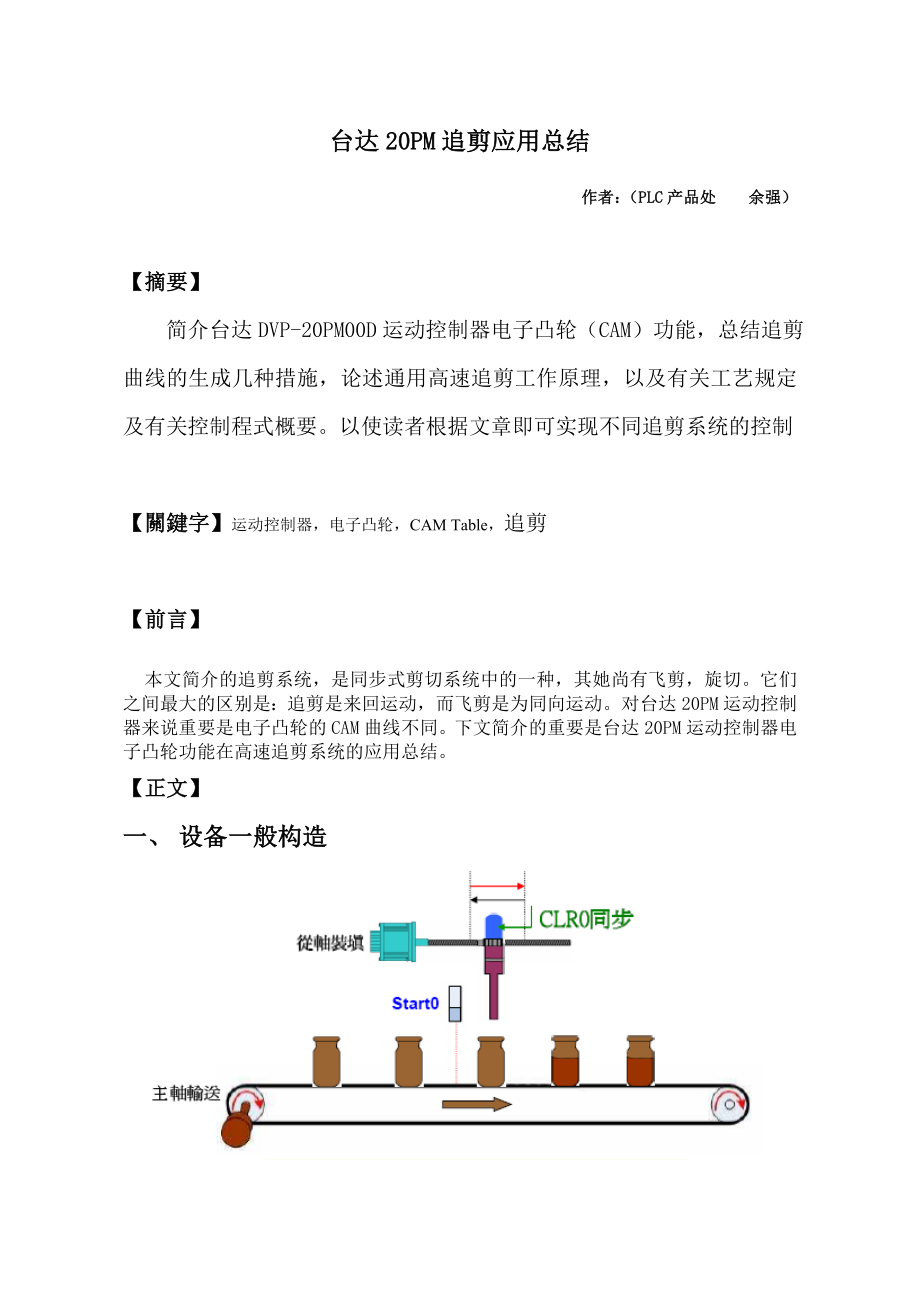
2、、 设备一般构造图2如上两个图示意,通用追剪机构一般涉及如下部分机构,分述如下:(1) 执行机构在裁切系统,执行机构是切刀,切刀是由液压推动,重要由一种进刀电磁阀和一退刀电磁阀控制切刀的上下。在饮料罐装系统执行机构为填充装置。(2) 測量機構安装于出來部分,如圖所示,同軸聯接一2500線的A/B相的差分編碼器,測量进料的速度,及長度。是电子凸轮运动中的主轴。(3) 追踪机构重要由台达伺服传动机构构成(功率大的可选VE系列变频器),由20PM00D的X轴输出控制,是电子凸轮运动中的从轴。(4) 进料傳動进料傳動是由变频电机、传动机构构成。二 追剪控制及20PM运动控制器电子凸轮功能应用简介1、
3、追剪曲线构成状态待机反向回车同步结速开始减速追速状态达到同步(1) 追速状态(Ramp up to Tracking):送料持续进行,20PM运动控制器在侦测输入材料之长度及当时送料速度的同步,并指挥伺服电机根据S曲线加速至与进料速度同步;在进入同步速度的瞬间,锯/切台与材料的动态相对位置已经整定完毕。接着便进入同步状态。(2)同步状态(Syncronized Zone): 一旦进入同步状态,20PM运动控制器立即送出同步信号(CLEAR)给执行控制机构,规定执行切断或罐装动作。同步,运动控制器仍然持续侦测进料长度及进料速度,随时保持锯/机台与材料之间的动态相对位置不变;如此才干保证裁切断面的
4、平整或罐装的精确。当执行完毕之后,机构返回自动退出,并发出完毕信号(CUTend)。(3)减速状态(Ramp down Stop):20PM运动控制器 指挥伺服电机根据S曲线减速直到完全停止。同步,仍然持续侦测并合计进料长度。一旦伺服电机完全停止,接着立即进入回车状态。(4 )回车状态(Return Home): 回车过程中,20PM运动控制器仍持续侦测并合计进料长度。(5)待机状态: 回车完毕之后20PM运动控制器系统自动进入待机状态,等待下一循环的开始。上面的从轴速度与主轴位置关系的几种环节,是一般常规追剪系统的关系。2、 如何根据主轴长度与从轴速度的关系生成电子凸轮我们熟知的凸轮关系是主
5、轴和从轴一一相应位置关系,如何从主轴位置和从轴的速度关系产生是主轴和从轴一一相应位置关系,是我们解决的重点。目前解决措施重要有两种,分别论述如下一, 通过20PM的编程软件,生成图形环节一,PMSOFT软件有个CAM CHART,使我们可以清晰地运用图形方式设定、修改电子凸轮曲线。提示人们注意的是必须建立两个CAM,分别为CAM0,CAM1。两个CAM表解析度设为同样,例如300点之因此要设两个CAM表,重要是为了在动态切换长度时,PM底层需要缓存。环节二,双击CAM 0进入资料表单会弹出下面的区段设立表。在左边一列设主轴长度,右边设相应的同步倍率,也可以理解成齿轮比。同步倍率的计算,假设本测
6、量系统编码器为2500线,测量轮为51MM,伺服转一周需10000 PULSE,伺服与导轨联结为2:1的减速带轮,导轨牙距为30MM,通过以上参数,我们可以计算出要达到线速度同步,输入脉冲与输出脉冲的频率比例关系。V1=F1*3.14*51/(2500)V2=F2*30/(2*10000)由于V1=V2,因此F2:F1=3.14*0*51/30*2500=21.35因此考虑到PLC发出频率,与伺服接受频率的合理性,我们把伺服齿轮比设为10,填 表设为2.2,如下图所示。分别为在测量轴600 PULSE达到速度同步,始终同步到5000PULSE, 然后是,降速到零,再高速返回。(这里的同步长度设
7、的比较长是由于考虑顾客执行机构切刀或罐装时间延迟,必须有足够长的同步区满足 )这里的参数可根据实际机械负载,机台长度,机器速度等灵活设立,例如说,切刀或罐装速度比较快,不需要在600PULE同步,完全可缩小同步区,以便使伺服加减速时间更长等。区段编号號区段起始位置 区段结束位置区段所需行程曲线型式 储存表单资料调用表单资料资料设定完毕取消设定清除表单资料 环节三,点DRAW,按钮,生成主轴位置与从轴速度的曲线图,生成的图形是按照主轴位置和从轴的速度关系,并不是主轴和从轴一一相应位置关系,比较上图与下图正式追剪曲线的区别可发现,需把几种图形依次下移。主轴长度从轴行程要生成主轴和从轴一一相应位置关
8、系必须按下export按钮,将数据导出,然后把数据再作为速度信号导入,即再按下import speed DATA 按钮,就自动生成了上图主轴与从轴的位置关系,速度关系,加速度关系图,然后将程序下载启动,就会每个循环都按此图执行。畫圖時,PMSOFT提供了幾種曲綫平滑功能,如圖中所示,可以減少機械震動。 可以看出本图追剪机构最大行程为10766 pULSE,切割的长度为8200 PULSE,换算成长度分别为700MM,与480MM,左右,也就是伺服驅動的機械来回行程是700MM,切割材料最短長度是480MM,如果需要在线修改切割长度只需用DTO指令动态修改追后一种CAM表的长度即可。 二,通过2
9、0PM的指令,生成图形。上述通过软件生成曲线,是过去20PM的通用过程,随着客户的规定,开发了更易使用的方式通过指令生成追剪曲线方式。DTO K100 D0 D100 K7D0=k10000 _ 建立飛剪CAM dataD101.D100 _ 整數格式主軸長度,(可为负数) D103.D102 _ 整數格式從軸長度D105.D104 _ 整數格式從軸同步長度D107.D106 _ 浮點格式從軸同步倍率D109.D108 _ 浮點格式從軸最高倍率限制D110 _ 曲線選擇(0 const speed,1 const Acc,2 SingleHypot,3 Cycloid)+0x8000 接續前次
10、資料, +0x4000 不動態變更, +0x 產生同步區頭D103.102尾D105.104)D111 結果(0 ok, 1 條件無法滿足, 2 CAM長度局限性)曲线暂不刷新曲线选择最大同步倍率同步倍率建立飞剪曲线控制正向行程从轴行程同步区长度生成反向曲线,仅需把主轴长度变为负值,并接续正向曲线生成完整追剪曲线生成正向曲线通过简朴几行程序,填入必要的参数就可以生成追剪应用。这样应用更有灵活性。生成图形如下图3、通过变化D110,把3赋值给D110,可以选择加减速更柔和的曲线,变化D104可以增长或减少同步区长度,同步倍率为浮点数,在正向追踪同步时倍率一定要按本文前面描述的措施计算的得出,反向
11、返回时倍率可大可小,不一定非要是同步倍率。下图为变化D110及返回倍率的图型及程序图中绿色方框内为正向追到同步时的从轴倍率曲线,蓝色部分为反向高速返回的从轴倍率曲线。从图中可看到正向倍率是2.2,是根据前文所述计算的成果,是必须的,反向倍率是3.2,是可以根据根据所需的长度任意设立的。大些则返回速度更快。小些则返回速度慢某些。正向追与反向返回,倍率与主轴之间的面积是从轴来回的行程。通过D110选择曲线形式,生成的柔和加减速曲线3 实际应用问题解决问题1:通过上述措施可以生成追剪图型,从轴伺服可以完全按照编码器位置启动同步返回,在程序中如何判断从轴达到同步,控制切刀或罐装开始执行呢,目前有两种措
12、施,措施一,运用凸輪資料狀態讀取指令,应用如下LD M10DFROM K100 D0 D100 K7D0=k10005 _ 讀回主軸資訊D101.D100 從軸位置(dog時Capture)D103.D102 從軸位置(CAM週期結束時Capture)D105.D104 主軸位置(dog時Capture)D107.D106 主軸位置(CAM週期結束時Capture)D109.D108 主軸位置(Start0m1746OFF or PG0M1746ON 時Capture)由于主轴编码器位置D1862是不断累加的,用凸輪資料狀態讀取指令读取的D106,是每个周期结束点的值,D1862减去D106,
13、就是主轴在一种周期的实时位置,在程序里用这个值与达到同步区的值(主轴与从轴同步时的值规划好曲线时就可拟定,例如本案例用软件规划时,同步开始是600PULSE,同步结束是5000PULE,用指令生成是可自动产生同步起始点与结束点,, 在程序中执行产生飞剪曲线时把D110 赋值+0x 產生同步區頭D103.102尾D105.104))比较,等于实时控制输出执行机构动作。措施二,直接运用20PM底层已规划好的方式。把进犹如步区的主轴数值赋值给D1838, 把离开同步区的主轴数值赋值给D1842,CLR0信号会在主轴到同步位置时输出,在离开同步区时断开。问题2:如果在同步过程中执行机构如切刀执行有故障
14、,没在规定的时间内完毕,如何保证,同步装置暂不减速,以免损坏装置。 追剪應用時有時需在将返回時檢查切刀与否到位, 如不到位保持目前速度往前至遇極限, 否则在返回時切刀如不到位也许會損傷機械結構. 此功能可與目前凸輪週期中的主軸位置. 在程式中比較与否啟動M1757。目前凸輪週期中的主軸位置可由D1863.D1862 目前主軸累積位置及运用FROM讀出”凸輪資料狀態2 讀取”中的”主軸位置(CAM 週期結束時Capture)”的差值获得。问题3:如果生成的图形是固定的,生产中如何变化需切割或罐装的距离。我们前文简介了两种生成曲线的措施,如果是第一种通过20PM的编程软件,生成图形,修改长度的措施是通过动态长度修改指令修改最后一笔主从轴的值在通过刷新指令即可。DTO K100 D5000 D200 K2D5000=K800,由于是200笔数据,每笔主从轴数据为占用4个数据寄存器,最后一笔主从轴数据地址为CR800,CR802,D200设立为需修改的长度,写入CAM表再执行DTO K100 D0 K0 K1D0=k10002 动态刷新CAM data就可在线刷新,实时修改长度如果是通过指令生成追剪曲线方式直接修改一种正向主轴长度,一种负向主轴长度即可系统应用状况目前,应用追剪的系统越来越多,遍及各行业,有包装行业的护角,建筑行业的钢管钢筋追锯等。20PM均有了大量成功案例。
- 温馨提示:
1: 本站所有资源如无特殊说明,都需要本地电脑安装OFFICE2007和PDF阅读器。图纸软件为CAD,CAXA,PROE,UG,SolidWorks等.压缩文件请下载最新的WinRAR软件解压。
2: 本站的文档不包含任何第三方提供的附件图纸等,如果需要附件,请联系上传者。文件的所有权益归上传用户所有。
3.本站RAR压缩包中若带图纸,网页内容里面会有图纸预览,若没有图纸预览就没有图纸。
4. 未经权益所有人同意不得将文件中的内容挪作商业或盈利用途。
5. 装配图网仅提供信息存储空间,仅对用户上传内容的表现方式做保护处理,对用户上传分享的文档内容本身不做任何修改或编辑,并不能对任何下载内容负责。
6. 下载文件中如有侵权或不适当内容,请与我们联系,我们立即纠正。
7. 本站不保证下载资源的准确性、安全性和完整性, 同时也不承担用户因使用这些下载资源对自己和他人造成任何形式的伤害或损失。
