《电液位置伺服控制系统》由会员分享,可在线阅读,更多相关《电液位置伺服控制系统(5页珍藏版)》请在装配图网上搜索。
1、_电液位置伺服控制系统摘要:采用电液比例方向阀,设计了电液位置伺服控制系统,以LABVIEW和MATLAB混合编程实现系统的实时控制功能,以个人计算机为数字控制器,采用NI公司的USB-6008数据采集卡完成数据采集、数据输出控制等多项功能。针对电液比例位置控制系统的特点,建立数学模型。对于系统的不稳定性,采用PID控制算法对其进行校正,提高了系统的精度及响应速度。关键词:LABVIEW,MATLAB,位置控制,PID算法0前言电液位置伺服系统是最基本和最常用的一种液压伺服系统,如机床工作台的位置、板带轧机的板厚、带材跑偏控制、飞机和船舶的舵机控制、雷达和火炮控制系统以及振动试验台等。在其它物
2、理量的控制系统中,如速度控制和力控制等系统中,也常有位置控制小回路作为大回路中的一个环节电液位置伺服系统主要是用于解决位置跟随的控制问题,其根本任务就是通过执行机构实现被控量对给定量的及时和准确跟踪,并要具有足够的控制精度。电液伺服系统的动态特性是衡量一套电液伺服系统设计及调试水平的重要指标。它由电信号处理装置和若干液压元件组成,元件的动态性能相互影响,相互制约及系统本身所包含的非线性,致使其动态性能复杂。因此,电液伺服控制系统的设计及仿真受到越来越多的重视1。本文以比例方向阀实现对伺服油缸的位置控制,加入位移传感器构成位置闭环控制系统。采用NI公司的USB-6008数据采集卡完成数据采集、数
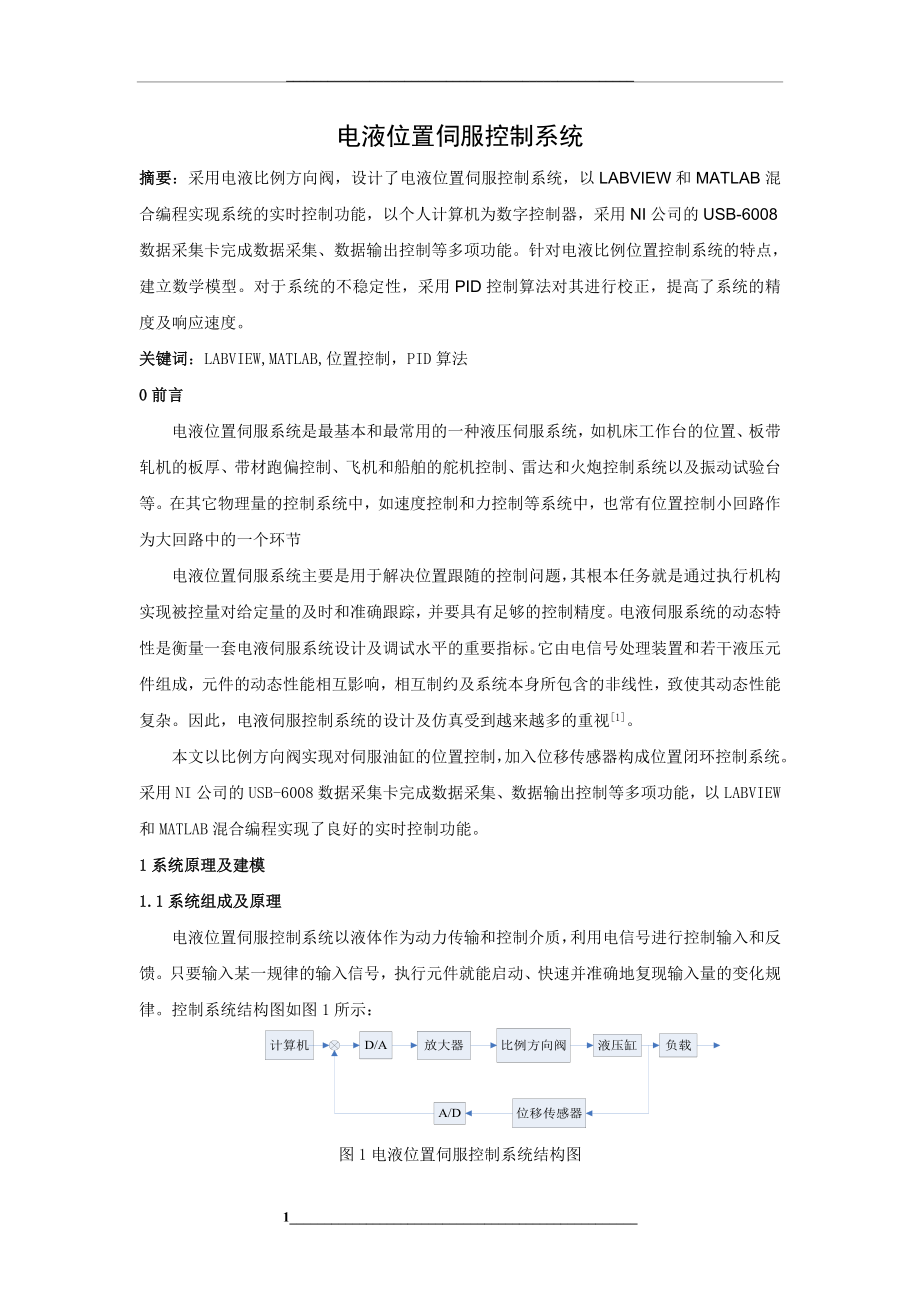
3、据输出控制等多项功能,以LABVIEW和MATLAB混合编程实现了良好的实时控制功能。1系统原理及建模1.1系统组成及原理电液位置伺服控制系统以液体作为动力传输和控制介质,利用电信号进行控制输入和反馈。只要输入某一规律的输入信号,执行元件就能启动、快速并准确地复现输入量的变化规律。控制系统结构图如图1所示: 图1电液位置伺服控制系统结构图1.2电液位置伺服系统建模本系统的电液比例方向阀为BFW-03-3C2-95-50,通径为10mm,最高工作压力31.5MPa,最大流量50l/ min。液压缸活塞的行程为20mm,根据国家标准GB2349-80活塞杆活塞系列,知内径D 为 63mm,有效工作
4、面积3.010-3m2。位移传感器选择为WDL200的直滑式导电塑料电位器,其性能参数为:05V输出,测量范围O-200mm;分辨率0.Olmm;线性度0.2。1.2.1 阀控伺服缸建模(1) 比例阀线性化流量方程2Q L = K q xv K c p L (1)式中K q比例阀流量增益;K c 比例阀流量压力系数;p L负载压力;xv比例阀阀芯位移。(2) 伺服油缸流量连续性方程 (2)Ap 液压缸活塞的有效面积;x p 活塞的位移;Ctp-总泄漏系数;Vt液压缸进油腔的容积;e系统的有效体积弹性模量。(3) 液压缸和负载力平衡方程 (3)Mt 活塞以及与活塞相联的负载折算到活塞上的总质量;
5、B p 活塞和负载的粘性阻尼系数;K L 负载的弹簧刚度;F L 作用在活塞上的外负载力。综上所述,阀控缸的数学模型为:对上式的数学模型进行简化,不考虑干扰油缸负载传递函数为 (4)1.2.2 伺服比例阀建模 (5)1.2.3 传感器传递函数(视为比例环节) (6)1.2.4 比例放大器增益 (7)综上,不考虑负载干扰情况下系统方块图为:图2 位置系统方框图系统的开环传递函数:=2 基于PID控制的MATLAB仿真 常规PID控制器的调节性能取决于参数Kp,Ki,Kd的整定情况,参数整定的好,则控制效果就好,否则相反。参数的整定通常有两种可用的方法:理论设计法和实验确定法。通过大量的实验,选择
6、PID参数分别为:Kp=1.1,Ki=0.2,Kd=0.01。在Simulink下的仿真图如图所示:图3 PID控制的仿真图3 基于LABVIEW的实时控制软件LABVIEW在线控制过程:首先进行数据采集,采集的数据是位移传感器的位移,转换为电压,送入数据采集卡的模拟量输入端AI0,程序中对模拟输入通道进行配置,主要包括配置采样通道号、最大最小值以及采样方式(差分、单端),并输出采样波形。接着是PID算法,要设定P、I、D的参数和输出的上下限,然后是模拟量的输出,程序中对模拟量输出通道配置,输出口配置为AO0口,并配置输出的最大最小值。经过程序运算后得到的数值送给伺服放大器的输入端,驱动伺服阀
7、,使液压缸前进或后退,完成对电液伺服系统的位置控制3。数据采集系统流程图如图4所示。图4 采集系统流程图数据采集时,前面板上配置有物理通道、模拟量输入的最大、最小值,配置方式为单端,并画出数据采集的实时波形曲线。本实验中实时数据采集的对象是位移传感器的反馈值,这个值送入N1-6008数据采集卡的模拟量输入端。采集系统子程序如图5所示。图5数据采集子程序框图4 结论(1)建模过程与仿真结果表明,对系统建立正确的数学模型并进行分析仿真,分析系统的动态特性,可以有效地预见系统的输出,达到对系统工作状态的了解,提高了设计和分析系统的效率,为进一步控制系统,提高响应速度和控制精度奠定了一定的基础。(2)从上面可以看出利用MATLAB/Simulink仿真提供的系统的可靠性验证,准确的模拟了实际系统的工作状态,必将在电液伺服控制领域得到广泛应用。LABVIEW可视化编程使得系统更加简单操作方便。参考文献:1 孙衍石,靳宝全,熊晓燕.电液伺服比例阀控缸位置控制系统仿真研究J.流体传动与控制,2009(7):32-352王春行.液压伺服控制系统M北京:机械工业出版社,19893金志强一种基于LABVIEW的PID控制器设计的方法J控制系统,2005,6,1-25_
 电液位置伺服控制系统
电液位置伺服控制系统