 模型参考自适应控制
模型参考自适应控制

《模型参考自适应控制》由会员分享,可在线阅读,更多相关《模型参考自适应控制(9页珍藏版)》请在装配图网上搜索。
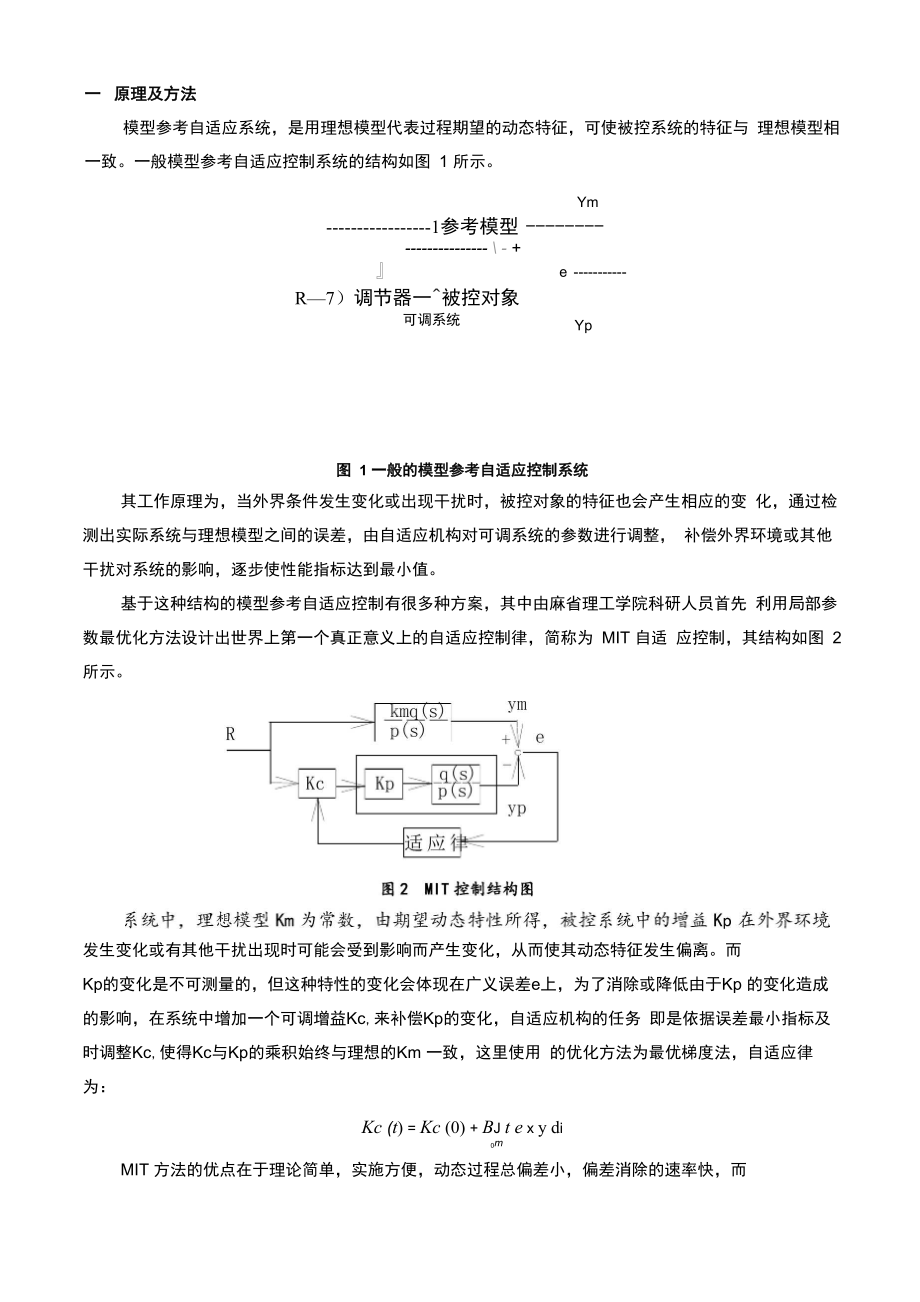
1、一 原理及方法模型参考自适应系统,是用理想模型代表过程期望的动态特征,可使被控系统的特征与 理想模型相一致。一般模型参考自适应控制系统的结构如图 1 所示。Ym1参考模型 - +e R7)调节器一被控对象可调系统Yp图 1 一般的模型参考自适应控制系统其工作原理为,当外界条件发生变化或出现干扰时,被控对象的特征也会产生相应的变 化,通过检测出实际系统与理想模型之间的误差,由自适应机构对可调系统的参数进行调整, 补偿外界环境或其他干扰对系统的影响,逐步使性能指标达到最小值。基于这种结构的模型参考自适应控制有很多种方案,其中由麻省理工学院科研人员首先 利用局部参数最优化方法设计出世界上第一个真正意
2、义上的自适应控制律,简称为 MIT 自适 应控制,其结构如图 2 所示。发生变化或有其他干扰出现时可能会受到影响而产生变化,从而使其动态特征发生偏离。而Kp的变化是不可测量的,但这种特性的变化会体现在广义误差e上,为了消除或降低由于Kp 的变化造成的影响,在系统中增加一个可调增益Kc,来补偿Kp的变化,自适应机构的任务 即是依据误差最小指标及时调整Kc,使得Kc与Kp的乘积始终与理想的Km 一致,这里使用 的优化方法为最优梯度法,自适应律为:Kc (t) = Kc (0) + BJ t e x y di0mMIT 方法的优点在于理论简单,实施方便,动态过程总偏差小,偏差消除的速率快,而且用模拟
3、元件就可以实现;缺点是不能保证过程的稳定性,换言之,被控对象可能会发散。二 对象及参考模型该实验中我们使用的对象为:参考模型为:G (s) = K 恥)=2pp p (s)s 2 + 2 s + 1G (s) = K 恥)=1mm p (s) s2 + 2s + 1用局部参数最优化方法设计一个模型参考自适应系统,设可调增益的初值 Kc(0)=0.2, 给定值r(t)为单位阶跃信号,即r(t)二AX1(t)。A取1。三 自适应过程将对象及参考模型离散化,采样时间取0.1s,进而可得对象及参考模型的差分方程分别 为:y (k) = 1.8079 y (k -1) - 0.8187 y (k - 2
4、) + 0.0047 r(k -1) + 0.0044 r(k - 2)my (k)二 1.8097 y (k -1) - 0.8187y (k - 2) + 0.0094u(k -1) + 0.0088u(k - 2) p p p其中 u 为经过可调增益控制器后的信号。编程进行仿真,经大量实验发现,取修正常数 B 为0.3,可得较好的动态过度过程,如下图 3 所示:图 3 仿真结果由图 3 中第一个图形可以看出,在阶跃扰动后,经过一段时间对象的输出完全跟踪上了 理想模型的值,系统最终趋于稳定;由第二个图可以看出,当系统稳定后,Kp*Kc等于Km, 说明补偿环节达到了期望的补偿效果,这与系统设
5、计的目标一致;由第三个图可以看出,在 控制的动态过程中,偏差的总和是比较小的,而且偏差的消除是很快的,这是由于所选用的 优化方法为最有梯度法的结果。在1中我们已经得到一个能使对象得到较好控制的参数B=0.3,在此情况下,我们将Kp 取为1,对应于实际中即指对象增益发生漂移,再做仿真,结果如图 4所示。图 4 对象增益变化后的仿真图由图4我们可以看出,在一个适当的修真参数B下,当对象的特性参数Kp发生漂移后, 控制器依然能很好的控制对象,这也证明了 MIT方法的自适应特性。而且我们发现,当Kp由 2 变为 1 后,控制器的控制效果更好了,具体表现为振荡减弱,过渡过程有所加快,关于导 致这一现象发
6、生的原因,我们会在第四部分中做详细的分析与说明。四 研究分析1 对于一个被控过程,系统能稳定运行是设计与控制的首要指标,然而如前所述,依据最优 控制的原则设计出来的MIT自适应控制器却可能会使得系统不稳定,输出发散,以下我们对 此做一研究,以期找出其中的相关信息。我们设某连续二阶对象为:K q(s)KpG (s) = p=p(s)b s2 + b s +121则有:b y + b y + y = K u = K K R2p1pppp cb y + b y + y = K R2m1mmme=y -ymp控制律为:Kc = BeymR为一阶跃信号,即R(t)=AX1(t),则偏差的动态方程为:b
7、e + b e + e + BK K A2e = 021p ms3s2s11BK K A 2pm0根据劳斯稳定判据,列出劳斯行列式:b2b1b - b BK K A 212pmb1得知,对于该连续系统,当BK K A2 b /b时会不稳定。p m 12试验中Kp=2, Km=1, A=1, b = 2, b = 1,因而对于连续系统,可求得当B=1时,系统12将会等幅振荡。现取B=1,得仿真曲线如图5所示。图5显示,当B为1的时候系统发散,另取原使系统稳定的B=0.3,计算出此时可使系 统振荡的阶跃幅值A二sqrt(1/0.3)做仿真,结果如图6所示:图6显示结果与图5 一样,系 统也发散。图
8、 5、6过程中所取参数均为由劳斯判据所得临界值,然而系统并未做等幅振荡,而是发 散,这似乎使得理论计算与仿真结果不符。但稍作分析我们就会发现,问题在于我们仿真时 用的是离散化的模型,而所用参数为由连续系统计算所得。我们知道用连续系统分析的结论 是不完全适用于离散系统的,这是因为随着采样时间取不同的值,同一对象的连续特性和离 散特性会不同。因而对于离散系统,我们对其做稳定性分析时还需考虑采样时间的影响。正 确的做法应是:将连续开环对象做 Z 变换,进而得到闭环的 Z 域特征方程,对此方程做双线 性变化,然后对所得w域方程列出其劳斯阵列,应用劳斯稳定判据即可得到使离散系统做等 幅振荡的相关参数。本
9、实验中广义偏差方程为三阶系统,在应用采样系统的劳斯稳定判据时 需要求解含有参变量的三解方程的解析解,运算量较大,因而这里未做相应的求解。只是对 其做一些定性的分析,指出对于同一对象,使得连续系统和离散系统做等幅振荡的参数B是 不一样的,因而仿真的结果并没有问题。在对离散系统进行大量的仿真实验后发现当 B 取 0.8367 左右的时候,离散系统会发生等 幅振荡。如图 7 所示:图 5 B=1 时的仿真结果图6 A=sqrt(1/0.3)时的仿真图 7 离散系统等幅振荡2 为了更进一步的了解该实验的相关特征,我们设计以下实验,来分别研究该仿真中 Kc 的初始值、阶跃信号的幅值对实验的影响。(1)
10、我们得知当 B=0.3 时原系统是稳定的,这里我们逐步改变阶跃信号的幅值,使 A 分别取1、1.3、1.6、1.9、2.3来观察其结果,如图 8 所示:图8 A 取不同值的过渡过程由图 8 可以看出,当 A 由小逐渐增大时,系统将由稳定转向发散,因为在设计实验或真 实过程中,该扰动的幅值不可太大,否则将使得系统发散。其原因已在 1中做过说明。(2) 在原系统稳定的情况下,我们改变修改常数 Kc 的初始值,分别取 Kc=-5、-0.5、 -0.2、 0、0.2、0.5、5 来进行观测,结果如图 9 所示:图 9 取不同 Kc 初始值的仿真由实验我们得到 Kc 的最终稳定值为 0.49921,有图
11、可以看出,当 Kc 的初始值取得离此 稳态值越远的话,过程的初始超调越大,但最终过程都能趋于稳定。因而在设计实验的时候 Kc 的初始值应根据先验知识或粗略计算去一个与其稳定值较为相近的值为宜。五 结论:由以上的推导及仿真结果可以看出,依据最优控制的方法设计出的 MIT 控制律并不能保 证控制器在任何情况下都能很好的工作,换言之,对于连续系统当 BK K A2 b / b 时系统 p m 1 2 会不稳定。对于离散系统随未给出准确的解析表达式,但从定性的角度来说,各参数的影响 是相似的。因而在实验设计中为避免系统发散,阶跃信号的幅值不可选择太大。同时由此式 可以看出,当Kp减小后,对应使系统振荡
12、的B将增大,这就说明了第三部分中我们在没有改 变B的情况下将Kp由2变为1后系统的性能为什么会得到提高。参考文献1韩曾晋自适应控制M.北京:清华大学出版社,1995: 148-151 厉玉鸣,等自动控制原理M.北京:化学工业出版社,2005: 279-280附程序clcclearts=0.1;B=0.8367;ei=0;% 临界值 B=0.836Kp=2;Km=1;Kc(1)=0.2;num1=Km;den1=1 2 1;% 参考模型sys1=tf(num1,den1);dsys1=c2d(sys1,ts,z)num11,den11=tfdata(dsys1,v);num2=Kp;den2=1
13、 2 1;% 对象模型sys2=tf(num2,den2);dsys2=c2d(sys2,ts,z)num22,den22=tfdata(dsys2,v);ym_1=0;ym_2=0;r_1=0;r_2=0;yp_1=0;yp_2=0;u_1=0;u_2=0;for i=1:1:500time(i)=i*ts;rin(i)=1;r(i)=rin(i);u(i)=Kc(i)*rin(i);ym(i)=-den11(2)*ym_1-den11(3)*ym_2+num11(2)*r_1+num11(3)*r_2;yp(i)=-den22(2)*yp_1-den22(3)*yp_2+num22(2)*
14、u_1+num22(3)*u_2;error(i)=ym(i)-yp(i);Err(i)二error(i)入2;gain(i)=Kc(i)*Kp;ei=ei+error(i)*ym(i)*ts;Kc(i+1)=Kc(1)+B*ei;ym_2=ym_1;ym_1=ym(i);r_2=r_1;r_1=r(i); yp_2=yp_1;yp_1=yp(i);u_2=u_1;u_1=u(i);endsubplot(1,3,1) plot(time,rin,r,time,ym,g,time,yp,b) legend(R,ym,yp,4) title(input and output) xlabel(time/second)subplot(1,3,2) plot(time,Km,r,time,gain,b) legend(Km,Kp*Kc) title(change of Kc) xlabel(time/second)subplot(1,3,3) plot(time,Err)title(change of error入2) xlabel(time/second)
- 温馨提示:
1: 本站所有资源如无特殊说明,都需要本地电脑安装OFFICE2007和PDF阅读器。图纸软件为CAD,CAXA,PROE,UG,SolidWorks等.压缩文件请下载最新的WinRAR软件解压。
2: 本站的文档不包含任何第三方提供的附件图纸等,如果需要附件,请联系上传者。文件的所有权益归上传用户所有。
3.本站RAR压缩包中若带图纸,网页内容里面会有图纸预览,若没有图纸预览就没有图纸。
4. 未经权益所有人同意不得将文件中的内容挪作商业或盈利用途。
5. 装配图网仅提供信息存储空间,仅对用户上传内容的表现方式做保护处理,对用户上传分享的文档内容本身不做任何修改或编辑,并不能对任何下载内容负责。
6. 下载文件中如有侵权或不适当内容,请与我们联系,我们立即纠正。
7. 本站不保证下载资源的准确性、安全性和完整性, 同时也不承担用户因使用这些下载资源对自己和他人造成任何形式的伤害或损失。
