《天津理工学院考试试卷》由会员分享,可在线阅读,更多相关《天津理工学院考试试卷(3页珍藏版)》请在装配图网上搜索。
1、一、判断题一个系统的平衡状态可能有多个,因此系统的李亚普诺夫稳定性与系统受干扰前所处的平衡位置无关。(X)1. 等价的状态空间模型具有相同的传递函数。(V)对一个系统,只能选取一组状态变量。(X)互为对偶的状态空间模型具有相同的能控性。(X)传递函数和状态空间表达式均可用于多输入多输出系统的描述。(X)二、简答题为什么状态空间描述法是一种内部描述?传递函数是一种外部描述?答:状态空间描述是一种内部描述,其用状态方程和输出方程去表征一个动态系统状态空间描述完全地表征了系统的动态行为和结构特性。相当于系统的输入、输出描述,状态空间描述是一种完全描述。传递函数只是反映系统外部变量间即输入-输出间的因
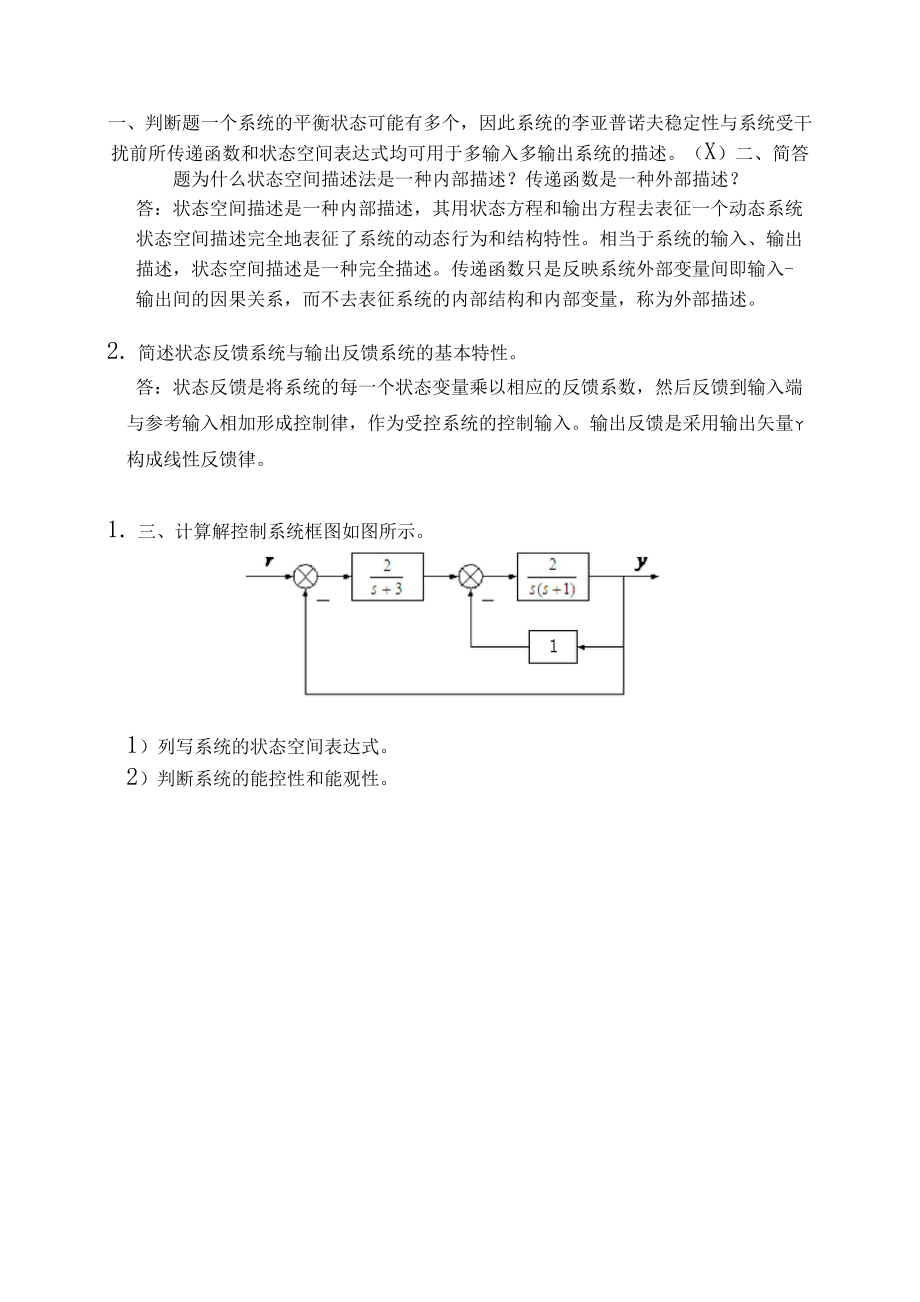
2、果关系,而不去表征系统的内部结构和内部变量,称为外部描述。2. 简述状态反馈系统与输出反馈系统的基本特性。答:状态反馈是将系统的每一个状态变量乘以相应的反馈系数,然后反馈到输入端与参考输入相加形成控制律,作为受控系统的控制输入。输出反馈是采用输出矢量丫构成线性反馈律。1. 三、计算解控制系统框图如图所示。1)列写系统的状态空间表达式。2)判断系统的能控性和能观性。2.设二阶线性齐次系统x=Ax,当x(0)二-1时,系统的解为兀(t)二e-2t-e-2t;当x(0)-1时,系统的解为x(t)=2e-t1)求系统的状态转移矩阵(t)。(2)求系统矩阵A。解:1)系统的解为x(t)二(t)x(0),
3、于是有x(t)=e-2t-e-2t=叫)-1,x(t)=2e-t-e-t二(t)-1于是有(t)=2-1e-2t-e-2t-1-22)2e-t+2e-2t2et+4e2t-02_2e2t+e-t4e2t+et13根据A=t=0A=t=0dt有四、综合题设系统的状态空间表达式为-21_Ox=x+u011y=1oh试设计全维状态观测器。具体要求为:1、验证状态观测器存在条件;2、使观测器的极点为-3、-3,设计反馈矩阵解:系统能观测性矩阵Q0=CCA10rankQ=2=n0系统能观测,故状态观测器存在期望状态观测器特征多项式为f*(s)二(s+3)2二s2+6s+9设G=gi,状态观测器特征多项式为g2f(s)=detb(AGC)=dets+2+g11gs+12=s2+(3+g)s+(2+g+g)112比较以上二式得g=3,g=4。即23
 天津理工学院考试试卷
天津理工学院考试试卷