《无线定位常用算法概述》由会员分享,可在线阅读,更多相关《无线定位常用算法概述(7页珍藏版)》请在装配图网上搜索。
1、无线定位算法综述一无线传感网络与节点定位1. 无线传感网络中的关键技术无线传感器网络作为当今信息领域新的究热点,涉及多学科交叉的研究领域 涉及到非常多的关键技,主要包括:拓扑控制;网络协议;网络安全;时间同步; 定位技术;数据融合;嵌入式操作系统;无线通信技术;跨层设计和应用层设计。2. 无线传感器网络节点定位机制无线传感器网络节点定位问题可表述为:依靠有限的位置己知节点即信标节 点(锚节点),确定布设区中其它未知节点的位置,在传感器节点间建立起一定的 空间关系的过程。无线定位机制一般由以下三个步骤组成:第一步,对无线电信号的一个或几个电参量(振幅、频率、相位、传播时间) 进行测量,根据电波的
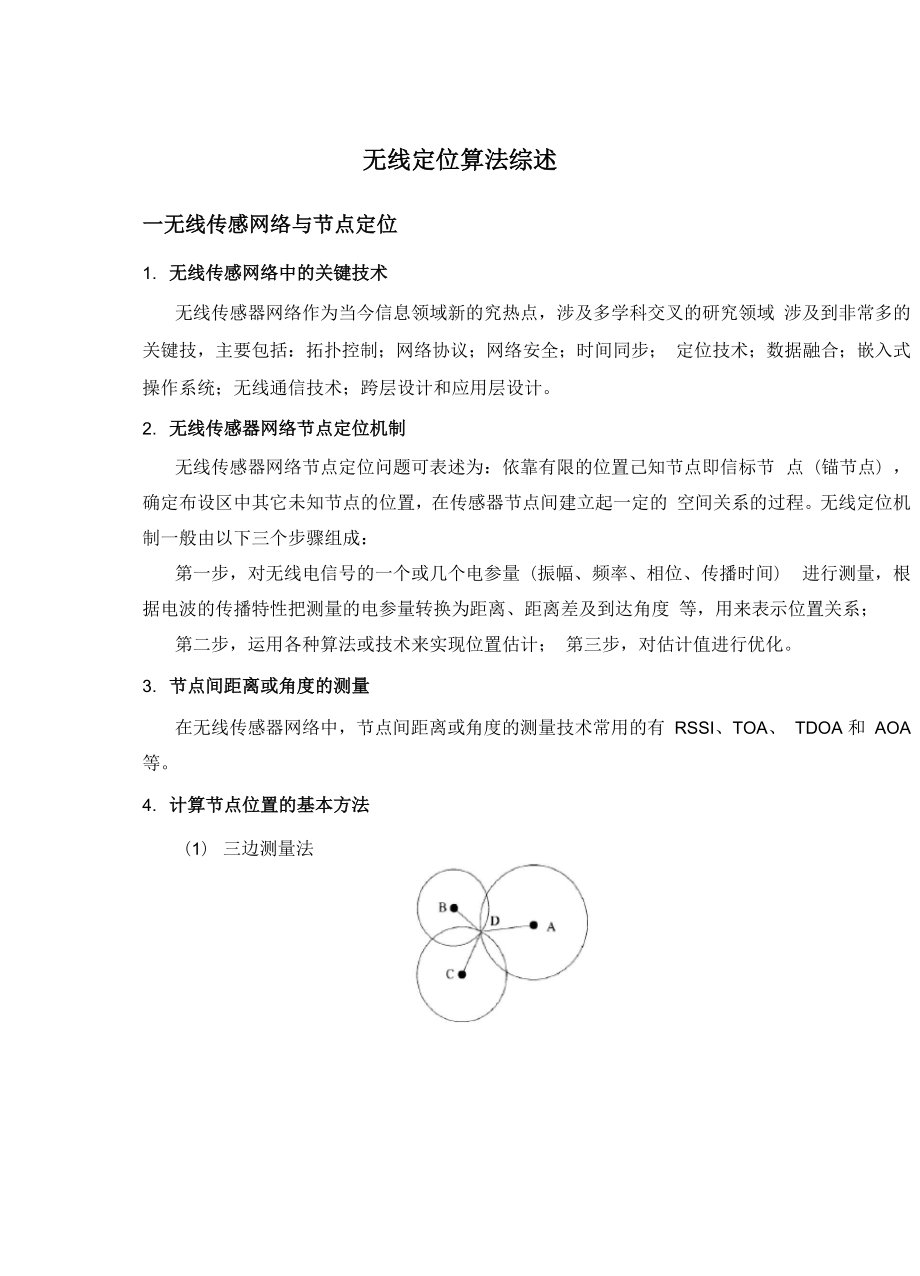
2、传播特性把测量的电参量转换为距离、距离差及到达角度 等,用来表示位置关系;第二步,运用各种算法或技术来实现位置估计; 第三步,对估计值进行优化。3. 节点间距离或角度的测量在无线传感器网络中,节点间距离或角度的测量技术常用的有 RSSI、TOA、 TDOA 和 AOA 等。4. 计算节点位置的基本方法(1) 三边测量法2(几Jl2(码T2(耳宀(2) 三角测量法;Jg-%只仏儿丫=rtUfl-耳F T儿 *J = 2扌 2r;(3) 极大似然估计法。y叮A =25. 无线传感器网络定位算法的性能评价使用标淮的最小均方差估计方法可以得到节点D的坐标为:2佃-) 2(乃-片)几个常用的评价标准:定
3、位精度;规模;锚节点密度;节点密度;覆盖率; 容错性和自适应性;功耗;代价。6. 无线传感器网络定位技术分类(1)物理定位与符号定位;(2)绝对定位与相对定位;(3)紧密耦合与松散耦合;(4)集中式计算与分布式计算;(5)基于测距技术的定位和无须测距技术的定位;(6)粗粒度与细粒度;(7)三角测量、场景分析和接近度定位。二典型的自身定位系统与算法到目前为止,WSN自身定位系统和算法的研究大致经过了两个阶段。第1 阶段主要偏重于紧密耦合型和基于基础设施的定位系统。对于松散耦合型和无须 基础设施的定位技术的关注和研究可以认为是自身定位系统和算法研究的第2 阶段。1. Cricket 定位系统未知节
4、点使用TDOA技术测量其与锚节点的距离,使用三边测量法提供物理 定位。2. RADAR 系统建立信号强度数据库,通过无线网络查询数据库,选择可能性最大的位置定位自身。在三边测量定位方式下,未知节点根据RSSI计算与多个基站的距离,然后 使用三边测量法定位,3. AHLos 系统AHLos 算法中定义了 3 种定位方式原子式、协作式和重复式最大似然 估计定位(atom,collaborative 和 iterative multilateral on)。atommultilateration 就是传统的最大似然估计定位。Collaborative multilateration 特点是同时定位跨
5、越多跳的一组节点。Iterative multilateration 是未知节点成功定位自身后,将其升级为锚节点,并 进入下一次循环。4. N-hop multilateration primitive 定位算法给出了判定节点是否可参与 collaborative multilateration 的充分条件,并使 用卡尔曼滤波技术循环定位求精。5. Generic Localized Algorithms详细指定了未知节点接受位置估算并升级为锚节点的条件。6. 凸规划定位算法把整个网络模型化为一个凸集,然后使用半定规划和线性规划方法得到一个 全局优化的解决方案。7. 质心算法确定自身位置为锚节
6、点所组成的多边形的质心。8. APIT 算法该算法的主要思想是:首先未知节点收集所有邻居锚节点的信息,并 测试未知节点是否位于不同的三个锚节点组成的三角形内,计算所有包 含该未知节点的三角形的重叠的区域,并用该区域的质心作为未知节点 的坐标。9. APS 算法APS 算法包括 6 种定位算法 :DV-Hop , DV-distance , Euclidean , DV-coordinate,DV-Bearing 和 DV-Radial。DV-Hop算法由3个阶段组成:首先所有节点获得距锚节点的跳数,然后计 算网络平均每跳距离;第三阶段使用三边测量法确定节点的位置。DV-distance算法与D
7、V- Hop类似,所不同的是相邻节点使用RSSI测量节 点间点到点距离。Euclidean 定位算法给出了计算与锚节点相隔两跳的未知节点位置的方法。 在DV-coordinate算法中,建立局部坐标系统(以自身位置作为原点)。随后, 相邻节点交换信息,从邻居那里接收锚节点的信息并将其转化为自身坐标系统中 的坐标后,可使用以下两种方法定位自身:(1) 在自身坐标系统中计算出距离,并使用这些距离进行三边测量定位;(2) 将自身坐标系统转换为全局坐标系统。这两种方法具有相同的性能。DV-Bearing和DV-Radial算法提出了以逐跳方式跨越两跳甚至三跳来计算 与锚节点的相对角度,最后使用三角测量
8、定位的方法。10. SPA(self-positioning algorithm)相对定位算法它选择网络中密度最大处的一组节点作为建立网络全局坐标系统的参考点 并在其中选择连通度最大的一个节点作为坐标系统的原点。首先根据节点间的测 距结果在各个节点建立局部坐标系统,通过节点间的信息交换与协调,以参考点 为基准通过坐标变换(旋转与平移)建立全局坐标系统。11 .Cooperative ranging 和 Two-Phase positioning 定位算法它们都分为启始和循环求精两个阶段。启始阶段着重于获得节点位置的粗略 估算。而在循环求精阶段,每一次循环开始时每个节点向其邻居节点广播它的位 置估算,并根据从邻居节点接收的位置信息和节点间测距结果,重新执行三边测 量。12. MDS-MAP 定位算法MDS-MAP 算法由 3 个步骤组成:(1) 首先从全局角度生成网络拓扑连通图,并为图中每条边赋予距离值。当节 点具有测距能力时,该值就是测距结。当仅拥有连通性信息时,所有边赋值为1。 然后使用最短路径算法,生成节点间距矩阵。(2) 对节点间距矩阵应用MDS技术,生成整个网络的2维或3维相对坐标 系统。(3) 当拥有足够的锚节点时(2 维最少3 个,3 维最少4 个),将相对坐标系统转化为绝对坐标系统。
 无线定位常用算法概述
无线定位常用算法概述