 机械振动学复习试题
机械振动学复习试题

《机械振动学复习试题》由会员分享,可在线阅读,更多相关《机械振动学复习试题(17页珍藏版)》请在装配图网上搜索。
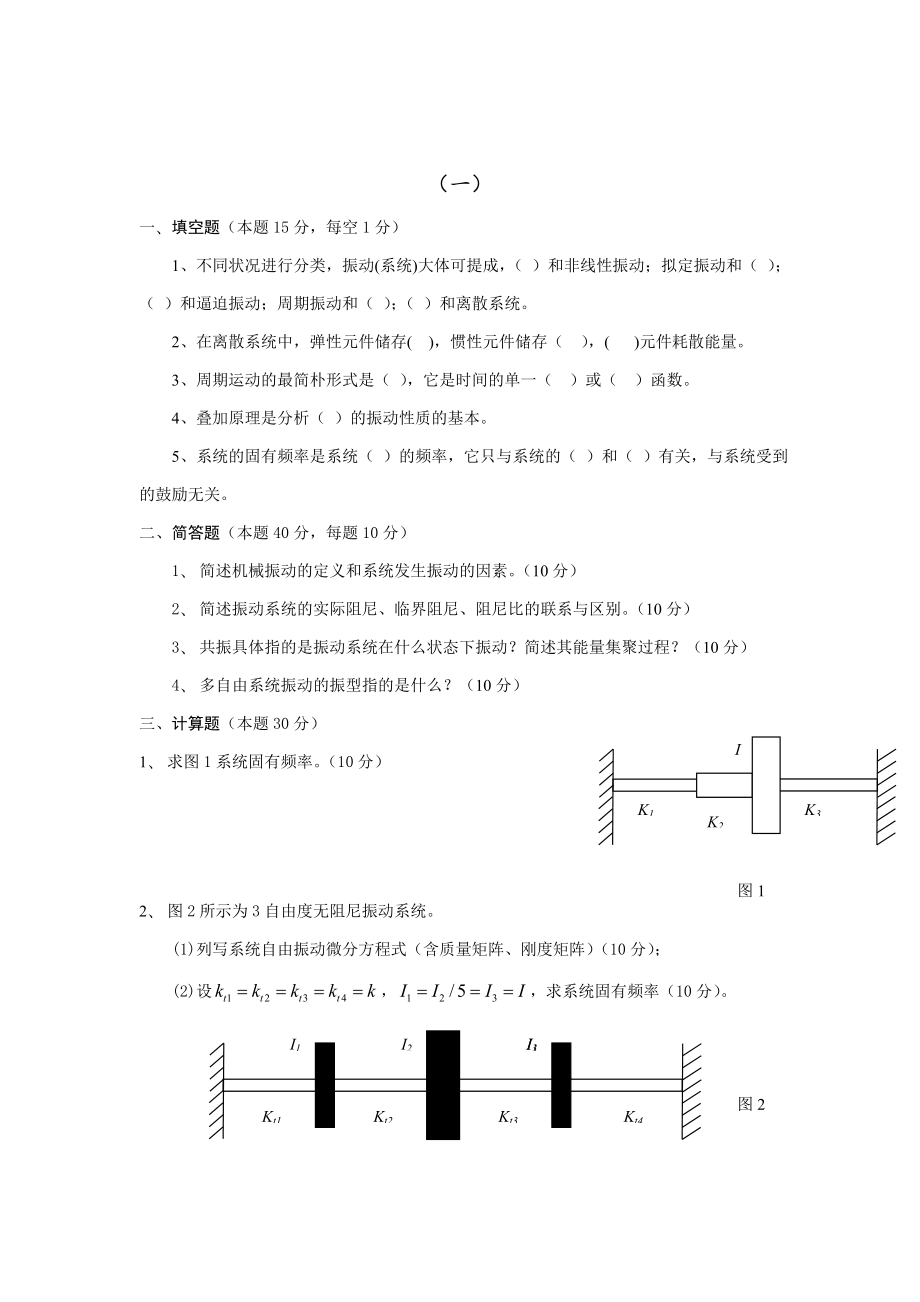
1、(一)一、 填空题(本题15分,每空1分)1、不同状况进行分类,振动(系统)大体可提成,( )和非线性振动;拟定振动和( );( )和逼迫振动;周期振动和( );( )和离散系统。2、在离散系统中,弹性元件储存( ),惯性元件储存( ),( )元件耗散能量。3、周期运动的最简朴形式是( ),它是时间的单一( )或( )函数。4、叠加原理是分析( )的振动性质的基本。5、系统的固有频率是系统( )的频率,它只与系统的( )和( )有关,与系统受到的鼓励无关。二、简答题(本题40分,每题10分)1、 简述机械振动的定义和系统发生振动的因素。(10分)2、 简述振动系统的实际阻尼、临界阻尼、阻尼比的
2、联系与区别。(10分)3、 共振具体指的是振动系统在什么状态下振动?简述其能量集聚过程?(10分)4、 多自由系统振动的振型指的是什么?(10分)K2IK1K3三、计算题(本题30分)1、 求图1系统固有频率。(10分)图12、 图2所示为3自由度无阻尼振动系统。(1)列写系统自由振动微分方程式(含质量矩阵、刚度矩阵)(10分);(2)设,求系统固有频率(10分)。Kt1Kt2I1Kt3I2I3I1Kt4图2 解:1)以静平衡位置为原点,设的位移为广义坐标,画出隔离体,根据牛顿第二定律得到运动微分方程:因此:系统运动微分方程可写为: (a)或者采用能量法:系统的动能和势能分别为 求偏导也可以得
3、到。2)设系统固有振动的解为:,代入(a)可得: (b)得到频率方程:即:解得:和因此: (c)将(c)代入(b)可得:10-1-0.22111.8211和解得:; ; 令,得到系统的三阶振型如图:四、证明题(本题15分)对振动系统的任一位移,证明Rayleigh商满足。这里,和分别是系统的刚度矩阵和质量矩阵,和分别是系统的最低和最高固有频率。(提示:用展开定理) 证明:对系统的任一位移x,Rayleigh商满足这里,K和M分别是系统的刚度矩阵和质量矩阵,和分别为系统的最低和最高固有频率。证明:对振动系统的任意位移x,由展开定理,x可按n个彼此正交的正规化固有振型展开:其中:u为振型矩阵,c为
4、展开系数构成的列向量:因此:由于:因此:由于:因此:即:证毕。(二)一、 填空题(本题15分,1空1分)1、机械振动是指机械或构造在(静平衡)附近的(弹性往复)运动。2、按不同状况进行分类,振动系统大体可提成,线性振动和(非线性振动);拟定性振动和随机振动;自由振动和和(逼迫振动);周期振动和(非周期振动);(持续系统)和离散系统。3、(惯性 )元件、(弹性 )元件、(阻尼 )元件是离散振动系统的三个最基本元素。4、叠加原理是分析(线性振动系统 )的振动性质的基本。5、研究随机振动的措施是(记录措施),工程上常用的随机过程的数字特性有:(均值),(方差),(自有关)和互有关函数。6、系统的无阻
5、尼固有频率只与系统的(质量)和(刚度)有关,与系统受到的鼓励无关。二、简答题(本题40分,每题5分)1、简述拟定性振动和随机振动的区别,并举例阐明。答:拟定性振动的物理描述量可以预测;随机振动的物理描述量不能预测。例如:单摆振动是拟定性振动,汽车在路面行驶时的上下振动是随机振动。2、简述简谐振动周期、频率和角频率(圆频率)之间的关系。答:,其中T是周期、是角频率(圆频率),f是频率。3、简述无阻尼固有频率和阻尼固有频率的联系,最佳用关系式阐明。答:,其中是阻尼固有频率,是无阻尼固有频率,是阻尼比。4、简述非周期逼迫振动的解决措施。答:1)先求系统的脉冲响应函数,然后采用卷积积分措施,求得系统在
6、外加鼓励下的响应;2)如果系统的鼓励满足傅里叶变换条件,且初始条件为0,可以采用傅里叶变换的措施,求得系统的频响函数,求得系统在频域的响应,然后再做傅里叶逆变换,求得系统的时域响应;3)如果系统的鼓励满足拉普拉斯变换条件,且初始条件不为0,可以采用拉普拉斯变换的措施,求得系统的频响函数,求得系统在频域的响应,然后再做拉普拉斯逆变换,求得系统的时域响应;5、什么是共振,并从能量角度简述共振的形成过程。答:当系统的外加鼓励与系统的固有频率接近时候,系统发生共振;共振过程中,外加鼓励的能量被系统吸取,系统的振幅逐渐加大。6、简述刚度矩阵K的元素的意义。答:如果系统的第j个自由度沿其坐标正方向有一种单
7、位位移,其他各个自由度的位移保持为零,为保持系统这种变形状态需要在各个自由度施加外力,其中在第i个自由度上施加的外力就是kij。7、简述线性变换U矩阵的意义,并阐明振型和U的关系。答:线性变换U矩阵是系统解藕的变换矩阵;U矩阵的每列是相应阶的振型。8、简述线性系统在振动过程中动能和势能之间的关系。答:线性系统在振动过程中动能和势能互相转换,如果没有阻尼,系统的动能和势能之和为常数。三、计算题(本题45分)1、设有两个刚度分别为,的线性弹簧如图1,计算它们并联时和串联时的总刚度。(5分) 图1图2图32、一质量为、转动惯量为的圆柱体作自由纯滚动,圆心受到一弹簧约束,如图2所示,求系统的固有频率。
8、(15分)3、求如图3所示的三自由度弹簧质量系统的固有频率和振型。(25分)(设 )1.解:1)对系统施加力P,则两个弹簧的变形相似为,但受力不同,分别为:由力的平衡有:故等效刚度为:2)对系统施加力P,则两个弹簧的变形为:,弹簧的总变形为:故等效刚度为:2. 解:取圆柱体的转角为坐标,逆时针为正,静平衡位置时,则当有转角时,系统有:由可知:即: (rad/s)3解:以静平衡位置为原点,设的位移为广义坐标,系统的动能和势能分别为求偏导得到:得到系统的广义特性值问题方程:和频率方程: 即:解得:和因此: 将频率代入广义特性值问题方程解得:; ; (三)一、 填空题(本题15分,每空1分)1、机械
9、振动大体可提成为:()和非线性振动;拟定性振动和();()和逼迫振动。2、在离散系统中,弹性元件储存( ),惯性元件储存(),()元件耗散能量。3、周期运动的最简朴形式是(),它是时间的单一()或()函数。4、叠加原理是分析( )系统的基本。5、系统固有频率重要与系统的()和()有关,与系统受到的鼓励无关。6、系统的脉冲响应函数和()函数是一对傅里叶变换对,和()函数是一对拉普拉斯变换对。7、机械振动是指机械或构造在平衡位置附近的( )运动。答案:1、线性振动;随机振动;自由振动; 2、势能;动能;阻尼3、简谐运动;正弦;余弦4、线性5、刚度;质量6、频响函数;传递函数7、往复弹性二、简答题(
10、本题40分,每题10分)1、 简述振动系统的实际阻尼、临界阻尼、阻尼比的联系与区别。(10分)答:实际阻尼是度量系统消耗能量的能力的物理量,阻尼系数是度量阻尼的量; 临界阻尼是;阻尼比是2、 共振具体指的是振动系统在什么状态下振动?简述其能量集聚过程?(10分)答:共振是指系统的外加鼓励与系统的固有频率接近时发生的振动;共振过程中,外加鼓励的能量被系统吸取,系统的振幅逐渐加大。3、 简述刚度矩阵K中元素kij的意义。(10分)答:如果系统的第j个自由度沿其坐标正方向有一种单位位移,其他各个自由度的位移保持为零,为保持系统这种变形状态需要在各个自由度施加外力,其中在第i个自由度上施加的外力就是k
11、ij。4、 简述随机振动问题的求解措施,以及与周期振动问题求解的区别。(10分)答:随机振动的振动规律只能用概率记录措施描述,因此,只能通过记录的措施理解鼓励和响应记录值之间的关系。而周期振动可以通过方程的求解,由初始条件拟定将来任意时刻系统的状态。三、计算题(45分)3.1、(14分)如图所示中,两个摩擦轮可分别绕水平轴O1,O2转动,无相对滑动;摩擦轮的半径、质量、转动惯量分别为r1、m1、I1和r2、m2、I2。轮2的轮缘上连接一刚度为k的弹簧,轮1的轮缘上有软绳悬挂质量为m的物体,求: 1)系统微振的固有频率;(10分)图12)系统微振的周期;(4分)。3.2、(16分)如图所示扭转系
12、统。设转动惯量I1I2,扭转刚度Kr1Kr2。1)写出系统的动能函数和势能函数; (4分)2)求出系统的刚度矩阵和质量矩阵; (4分)3)求出系统的固有频率; (4分)4)求出系统振型矩阵,画出振型图。 (4分)图23.3、(15分)根据如图所示微振系统,1)求系统的质量矩阵和刚度矩阵和频率方程; (5分)2)求出固有频率; (5分)3)求系统的振型,并做图。 (5分)图3计算题答案:3.1 ( 1)系统微振的固有频率;(10分);(2)系统微振的周期;(4分)。选用广义坐标x或;拟定m的位移与摩擦轮转角的关系,(质量m的位移与摩擦轮转动的弧长及弹簧的变形量相等);,写出系统得动能函数Et、势
13、能函数U;令d(Et+U)=0.求出广义质量和刚度求出,进一步求出T3.2. (1)写出系统的动能函数和势能函数(4分);(2)求出系统的刚度矩阵和质量矩阵(4分);(3)求出系统的固有频率(4分);(4)求出系统振型矩阵,画出振型图(4分)。令1)略2) 3)频率: 4)振型矩阵:振型图(略)3.3 (1)求系统的质量矩阵和刚度矩阵和频率方程(5分);(2)求出固有频率(5分);(3)求系统的振型,并做图(5分)频率方程: 即:固有频率: 振型矩阵: 振型图(略) (四)一、填空题(本题15分,每空1分)1、机械振动按不同状况进行分类大体可提成(线性振动)和非线性振动;拟定性振动和(随机振动
14、);(自由振动)和逼迫振动。 2、周期运动的最简朴形式是(简谐运动),它是时间的单一(正弦)或(余弦)函数。3、单自由度系统无阻尼自由振动的频率只与(质量)和(刚度)有关,与系统受到的鼓励无关。4、简谐鼓励下单自由度系统的响应由(瞬态响应)和(稳态响应)构成。 5、工程上分析随机振动用(数学记录)措施,描述随机过程的最基本的数字特性涉及均值、方差、(自有关函数)和(互有关函数)。6、单位脉冲力鼓励下,系统的脉冲响应函数和系统的(频响函数)函数是一对傅里叶变换对,和系统的(传递函数)函数是一对拉普拉斯变换对。二、简答题(本题40分)1、什么是机械振动?振动发生的内在因素是什么?外在因素是什么?(
15、7分)答:机械振动是指机械或构造在它的静平衡位置附近的往复弹性运动。(3分)振动发生的内在因素是机械或构造具有在振动时储存动能和势能,并且释放动能和势能并能使动能和势能互相转换的能力。(2分)外在因素是由于外界对系统的鼓励或者作用。(2分)2、从能量、运动、共振等角度简述阻尼对单自由度系统振动的影响。(12分)答:从能量角度看,阻尼消耗系统的能力,使得单自由度系统的总机械能越来越小;(2分)从运动角度看,当阻尼比不小于等于1时,系统不会产生振动,其中阻尼比为1的时候振幅衰减最快(4分);当阻尼比不不小于1时,阻尼使得单自由度系统的振幅越来越小,固有频率减少,阻尼固有频率;(2分)共振的角度看,
16、随着系统能力的增长、增幅和速度增长,阻尼消耗的能量也增长,当阻尼消耗能力与系统输入能量平衡时,系统的振幅不会再增长,因此在有阻尼系统的振幅并不会无限增长。(4分)3、简述无阻尼多自由度系统振型的正交性。(7分)答:属于不同固有频率的振型彼此以系统的质量和刚度矩阵为权正交。其数学体现为:如果当时,则必然有。4、用数学变换措施求解振动问题的措施涉及哪几种?有什么区别?(7分)答:有傅里叶变换措施和拉普拉斯变换措施两种。(3分)前者规定系统初始时刻是静止的,即初始条件为零;后者则可以计入初始条件。(4分)5、简述刚度矩阵K中元素kij的意义。(7分)答:如果系统的第j个自由度沿其坐标正方向有一种单位
17、位移,其他各个自由度的位移保持为零,为保持系统这种变形状态需要在各个自由度施加外力,其中在第i个自由度上施加的外力就是kij。三、计算题(45分)3.1、(12分)如图1所示的扭转系统。系统由转动惯量I、扭转刚度由K1、K2、K3构成。 1)求串联刚度K1与K2的总刚度(3分)2)求扭转系统的总刚度(3分)3) 求扭转系统的固有频率(6分)。3.2、(14分)如图所示,轮子可绕水平轴转动,对转轴的转动惯量为I,轮缘绕有软绳,下端挂有重量为P的物体,绳与轮缘之间无滑动。在图示位置,由水平弹簧维持平衡。半径R与a均已知。1)写出系统的动能函数和势能函数;(5分)2) 求系统的运动方程;(4分)2)
18、求出系统的固有频率。(5分)3.3、(19分)图2所示为3自由度无阻尼振动系统,。1)求系统的质量矩阵和刚度矩阵和频率方程; (6分)2)求出固有频率; (7分)3)求系统的振型,并做图。 (6分)3.1 解:1)串联刚度K1与K2的总刚度:2) 系统总刚度:3) 系统固有频率: (也可用能量法,求得系统运动方程,即可得其固有频率)3.2解:取轮的转角为坐标,顺时针为正,系统平衡时,则当轮子有转角时,系统有: 由可知:即:(rad/s),故 (s)3.3 解:1)以静平衡位置为原点,设的位移为广义坐标,画出隔离体,根据牛顿第二定律得到运动微分方程:因此:系统运动微分方程可写为: (a)或者采用能量法:系统的动能和势能分别为 求偏导也可以得到。2)设系统固有振动的解为:,代入(a)可得: (b)得到频率方程:即:解得:和因此: (c)将(c)代入(b)可得:和解得:; (或 ); (或or )系统的三阶振型如图:
- 温馨提示:
1: 本站所有资源如无特殊说明,都需要本地电脑安装OFFICE2007和PDF阅读器。图纸软件为CAD,CAXA,PROE,UG,SolidWorks等.压缩文件请下载最新的WinRAR软件解压。
2: 本站的文档不包含任何第三方提供的附件图纸等,如果需要附件,请联系上传者。文件的所有权益归上传用户所有。
3.本站RAR压缩包中若带图纸,网页内容里面会有图纸预览,若没有图纸预览就没有图纸。
4. 未经权益所有人同意不得将文件中的内容挪作商业或盈利用途。
5. 装配图网仅提供信息存储空间,仅对用户上传内容的表现方式做保护处理,对用户上传分享的文档内容本身不做任何修改或编辑,并不能对任何下载内容负责。
6. 下载文件中如有侵权或不适当内容,请与我们联系,我们立即纠正。
7. 本站不保证下载资源的准确性、安全性和完整性, 同时也不承担用户因使用这些下载资源对自己和他人造成任何形式的伤害或损失。
